RANCANG BANGUN SISTEM MINIATUR KERETA MAGLEV DENGAN MENGENDALIKAN GAP PADA LANDASAN GUIDEWAY SKRIPSI TEKNIK ELEKTRO KONSENTRASI TEKNIK KONTROL Ditujukan untuk memenuhi persyaratan memperoleh gelar Sarjana Teknik REZA KEMAL FIRDAUS NIM. 145060301111047 UNIVERSITAS BRAWIJAYA FAKULTAS TEKNIK MALANG 2018

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
RANCANG BANGUN SISTEM MINIATUR KERETA MAGLEV DENGAN
MENGENDALIKAN GAP PADA LANDASAN GUIDEWAY
SKRIPSI
TEKNIK ELEKTRO KONSENTRASI TEKNIK KONTROL
Ditujukan untuk memenuhi persyaratan memperoleh gelar Sarjana Teknik
REZA KEMAL FIRDAUS
NIM. 145060301111047
UNIVERSITAS BRAWIJAYA
FAKULTAS TEKNIK
MALANG
2018
DAFTAR ISI
Halaman PENGANTAR Error! Bookmark not defined.
DAFTAR GAMBAR ............................................................................................... 3
DAFTAR LAMPIRAN ............................................................................................ 5
BAB 1 PENDAHULUAN .................................... Error! Bookmark not defined.
1.1 Latar Belakang ........................................ Error! Bookmark not defined.
1.2 Rumusan Masalah ................................... Error! Bookmark not defined.
1.3 Batasan Masalah ...................................... Error! Bookmark not defined.
1.4 Manfaat .................................................... Error! Bookmark not defined.
BAB 2 TINJAUAN PUSTAKA ........................... Error! Bookmark not defined.
2.1 Gaya Magnetik dan Gaya Lorentz .......... Error! Bookmark not defined.
2.2 Fungsi Alih .............................................. Error! Bookmark not defined.
2.3 Respon Sistem ......................................... Error! Bookmark not defined.
2.4 Latar Belakang Teknologi Kereta Magnetic LevitationError! Bookmark not
defined.
2.5 Electromagnetic Suspension ................... Error! Bookmark not defined.
2.6 Sensor Ultrasonik .................................... Error! Bookmark not defined.
2.7 Filter Kalman ........................................... Error! Bookmark not defined.
BAB 3 METODE PENELITIAN ......................... Error! Bookmark not defined.
3.1 Spesifikasi Alat ....................................... Error! Bookmark not defined.
3.2 Perancangan dan Pembuatan Alat ........... Error! Bookmark not defined.
BAB 4 HASIL DAN PEMBAHASAN ................ Error! Bookmark not defined.
4.1 Prinsip Kerja Penggerak Utama Rancang Bangun KeretaError! Bookmark
not defined.
4.2 Pengujian Nilai Tegangan Dan Arus Terhadap Nilai Pulsa yang Diberikan
Mikrokontroller .................................................. Error! Bookmark not defined.
4.3 Pengujian Nilai Jarak Ketinggian Terhadap Nilai PWM.Error! Bookmark
not defined.
4.4 Penentuan Nilai PID untuk Proses Pengendalian Pada Kereta MaglevError!
Bookmark not defined.
4.5 Pengujian Respon Sistem Awal Dengan Setpoint BerbedaError! Bookmark
not defined.
4.6 Evaluasi Pengujian Sistem ...................... Error! Bookmark not defined.
BAB 5 KESIMPULAN DAN SARAN ................ Error! Bookmark not defined.
5.1 Kesimpulan .............................................. Error! Bookmark not defined.
5.2 Saran ........................................................ Error! Bookmark not defined.
DAFTAR PUSTAKA ............................................ Error! Bookmark not defined.
LAMPIRAN Error! Bookmark not defined.
DAFTAR GAMBAR
Halaman
Gambar 2.1 Respon Sinyal Step Dari Sistem Orde SatuError! Bookmark not defined.
Gambar 2.2 Respon Sinyal Step Dari Sistem Orde DuaError! Bookmark not defined.
Gambar 2.3 Perbandingan sistem EMS dan EDS pada sistem magnetic levitation.Error! Bookmark not defined.
Gambar 2.4 Prnsip Kerja EMS .............................. Error! Bookmark not defined.
Gambar 2.5 Prinsip Sensor Ultrasonik................... Error! Bookmark not defined.
Gambar 2.6 Prinsip Pemantulan Ultrasonik ........... Error! Bookmark not defined.
Gambar 2.7 Proses penghitungan pada Kalman filterError! Bookmark not defined.
Gambar 2.8 Diagram alir pada kalman filter ......... Error! Bookmark not defined.
Gambar 3.1 Konsep pembacaan posisi .................. Error! Bookmark not defined.
Gambar 3.2 Diagram blok sistem .......................... Error! Bookmark not defined.
Gambar 3.3 Diagram alir kerja sistem prototipe .... Error! Bookmark not defined.
Gambar 4.1 Penggerak (a) pasif kereta dan (b) badan keretaError! Bookmark not defined.
Gambar 4.2 Penggerak aktif kereta ....................... Error! Bookmark not defined.
Gambar 4.3 Grafik hasil pengukuran keluaran tegangan dengan pengaruh sinyal PWM …………………………………………………………………..Error! Bookmark not defined.
Gambar 4.5 Grafik Hasil pengukuran jarak terhadap sinyal PWMError! Bookmark not defined.
Gambar 4.6 Grafik respon alat dengan PID tuning Sumber : Pengukuran .... Error! Bookmark not defined.
Gambar 4.7. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,1 cm ..... Error! Bookmark not defined.
Gambar 4.8. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,2 cm ..... Error! Bookmark not defined.
Gambar 4.9. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,3 cm ..... Error! Bookmark not defined.
Gambar 4.10. Grafik Relasi Parameter Yang mempengaruhiError! Bookmark not defined.
DAFTAR LAMPIRAN
Halaman
Lampiran 1 Perancangan Alat .......................... Error! Bookmark not defined.
Lampiran 2 Listing Program Sensor ................ Error! Bookmark not defined.
Lampiran 3 Blok Program Kontrol Pada Raspberry PiError! Bookmark not defined.
Lampiran 4 Miniatur Kereta Beserta Guideway KeretaError! Bookmark not defined.
Lampiran 5 ATMEGA328 ............................... Error! Bookmark not defined.
Lampiran 6 HC-SR04 ...................................... Error! Bookmark not defined.
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Seiring dengan semakin meningkatnya dari populasi masyarakat, transportasi darat
seperti kendaraan pribadi dan penerbangan tidak akan sanggup menampung. Sesuai permintaan
cara angkutan umum yang telah meningkat. Dalam rangka untuk tepat melayani masyarakat,
sistem transportasi new-generation semacam itu harus memenuhi persyaratan tertentu seperti
kecepatan, reliabilitas, dan keselamatan. Selain itu, itu harus nyaman, ramah lingkungan,
pemeliharaan rendah, kompak yang ringan, dan cocok untuk transprotasi umum. Kereta
magnetic levitation (maglev) ada salah satu solusi yang terbaik dari permasalahan tersebut.
Sementara sebuah kereta api konvensional, menggunakan gesekan antara roda dan rel, kereta
maglev menggantikan roda oleh elektromagnetik dan levitasi di jalur, dan memproduksi
kekuatan propulsi secara elektromagnetik tanpa ada kontak (Lee & Lee, 2006)
Dalam penelitian ini akan digunakan sensor ultrasonik untuk mengukur jarak jalur kereta
dengan kereta agar tetap konstan. Penelitian ini diharapkan mengasilkan sebuah rancang bangun
yang layak untuk melihat prinsip kerja gerak levitasi pada kereta maglev.
1.2 Rumusan Masalah
Berdasarkan masalah yang telah dijelaskan pada latar belakang, dapat dibuat rumusan
masalah yaitu bagaimana membuat rancang bangun minatur kereta maglev untuk mengetahui
respon kontrol gerak levitasi menggunakan kontrol PID sebagai kontrol arus pada aktuator
solenoida.
1.3 Batasan Masalah
Dengan mengacu pada permasalahan yang telah dirumuskan, maka hal-hal yang berkaitan
dengan penelitian akan diberi batasan sebagai berikut:
1. Alat dirancang agar dapat mengetahui dan sesuai dengan prinsip kerja gerak levitasi pada
kereta maglev.
2. Alat dirancang untuk mengetahui respon dengan pelakuan kontrol berbeda.
1.4 Manfaat
Penelitian ini turut berkontribusi dalam pengembangan teknologi di bidang transportasi
yaitu sebagai alat simulasi untuk mengetahui prinsip gerak levitasi pada kereta maglev, sehingga
dapat dijadikan sebagai acuan untuk pengembangan kereta maglev yang lebih lanjut.
1
BAB II
BAB 1 TINJAUAN PUSTAKA
1.1 Gaya Magnetik dan Gaya Lorentz
Bila sebuah partikel bermuatan bergerak dalam medan magnetik maka ia akan mengalami
gaya magnetik yang arahnya tegak lurus pada bidang yang dibentuk oleh vektor kecepatan
partikel dan vektor medan magnetik. Bersama-sama dengan gaya listrik (gaya Coulomb) gaya
magnetik membentuk sebuah gaya yang disebut sebagai gaya Lorentz. Berbagai aplikasi dapat
diturunkan dengan memanfaatkan gaya Lorentz, seperti pemilih (selektor) kecepatan, dan efek
Hall. Gaya magnetik sendiri dapat menjelaskan prinsip terjadinya gerak melingkar partikel
bermuatan dan spektroskopi massa. (Viridi, 2010)
• Gaya magnet
Sebuah partikel bermuatan q yang bergerak dengan kecepatan
̂ ̂ (2.1)
dalam suatu ruang bermedan magnetik
̂ ̂ (2.2)
akan mengalami gaya magnetik
(2.3)
̂ ̂ ̂
• Garis-garis medan magnetik dan kutub magnetik.
Terdapat garis-garis medan yang menggambarkan arah medan magnetik dalam ruang.
Garis-garis medan magnetik ini berawal dari kutub magnetik utara U menuju kutub magnetik
selatan S. Garis-garis medan magnetik juga tidak saling berpotongan.
Kutub magnetik sejenis akan tolak-menolak, sedangkan kutub magnetik berbeda jenis
akan tarik-menarik.
Dengan menggunakan prinsip relativitas dapat dilihat bahwa medan magnetik sebenarnya
adalah suatu medan listrik yang dilihat dalam kerangka acuan yang bergerak. Muatan adalah
penyebab medan listrik, sehingga apabila sejumlah muatan bergerak, maka medan listrik yang
disebabkannya juga akan berubah. Perubahan ini (muatan bergerak menyebabkan arus) akan
menyebabkan timbulkan medan magnetik.
• Gaya Lorentz
Suatu partikel bermuatan q yang bergerak dalam ruang bermedan listrik
̂ ̂ (2.4)
akan mengalami sekaligus gaya listrik dan gaya magnetik ,
(2.5)
̂ ̂
1.2 Fungsi Alih
Dalam teori kendali, fungsi yang disebut fungsi alih seringkali digunakan untuk
mencirikan hubungan masukan dan keluaran dari sistem linier parameter konstan. Konsep fungsi
alih ini hanya digunakan pada sistem linear parameter konstan. Fungsi alih sistem linear
parameter konstan didefinisikan sebagai perbandingan dari transformasi Laplace keluaran dan
transformasi Laplace masukan dengan asumsi semua kondisi awal bernilai nol (Laksono, 2014).
Sistem linear parameter konstan dinyatakan dengan persamaan linear differensial pada
persamaan (2.6) berikut.
. . .. (2.6)
Dimana y adalah keluaran sistem dan x adalah masukan sistem. Fungsi alih dari persamaan
(2.6) diperoleh dengan mencari transformasi Laplace dari kedua persamaan (2.6) dengan asumsi
semua kondisi awal bernilai nol dan diperoleh persamaan (2.7) berikut.
..
.. (2.7)
1.3 Respon Sistem
Sinyal masukan sistem kendali tidak dapat diketahui sebelumnya tetapi mepunyai sifat
acak sehingga masukan sesaat tidak dapat dinyatakan secara analitis, untuk analitis dan
perancangan sistem kendali, harus dipunyai dasar perbandingan kinerja berbagai sistem kendali.
Dasar ini disusun untuk melakukan perbandingan tanggapan berbagai sistem, yaitu dengan
3
memberikan masukan uji. Masukan uji yang biasa digunakan adalah fungsi undak, fungsi laju,
fungsi percepatan, fungsi impulsa, fungsi sinusoida dan sebagainya. (Laksono, 2014)
• Sistem Orde Satu
Fungsi alih dari sistem orde satu dinyatakan dengan persamaan sebagai berikut.
(2.8)
Dimana C adalah fungsi masukan, dan R adalah fungsi keluaran, dan notasi yang lebih
umum dari fungsi alih orde satu dinyatakan dengan persamaan (2.9) berikut.
(2.9)
Dipertimbangkan sistem orde satu, , dimana step respon adalah.
/ / (2.10)
Jika bisa mengidentifikasi K dan a maka bisa didapatkan transfer function dari
sistemnya.Pada gambar 2.1 adalah grafik dari respon sinyal step dari sistem.
Gambar 2.1 Respon Sinyal Step Dari Sistem Orde Satu Sumber : (Nise, 2011)
• Sistem Orde Dua
Bentuk standar dari fungsi alih orde kedua dapat dinyatakan dengan persamaan (2.11)
berikut.
(2.11)
Dimana ζ adalah rasio redaman, adalah frekuensi alamiah tidak teredam terlihat bahwa
sistem dari sistem orde kedua standar merupakan fungsi dari ζ dan . Tanggapan terhadap
masukan undak dari sistem orde kedua pada persamaan (2.12) berikut.
(2.12)
Transformasi balik dari persamaan (2.12) tidak diturunkan dari persamaan (2.11). namun
dengan mengasumsikan bahwa pole-pole dari G(s) bersifat kompleks, sehingga diperoleh
persamaan (2.13) berikut.
1 sin β t θ (2.13)
Dimana 1 ζ dan tan
Pada tanggapan ini, 1/ζ adalah konstanta waktu dari sinusoida dalam detik serta
frekuensi dari sinusoida teredam. Sekarang akan ditunjukkan tanggapan undak yang umum pada
sistem orde kedua. Tanggapan undak pada persamaan (2.13) adalah fungsi ζ dan . Jika
ditentukan nilai ζ saja maka memplot c (t) belum bisa dilakukan tanpa menentukan juga.
Untuk menyederhanakan plot grafik c(t) akan dipergunakan suatu nilai ζ yang telah ditentukan
sebagai fungsi dari keluarga kurva dari berbagai nilai ζ sangat berguna dan di perlihatkan
pada gambar 2.1 dengan nilai ζ antara 0 ζ 2 untuk 0 ζ 1 tanggapan merupakan
sinusoida teredam. Untuk ζ 0 tanggapan merupakan sinusoida tidak teredam dan untuk ζ 1
osilasi sudah tidak ada. Pada persamaan (2.13) terlihat bahwa untuk ζ 0 tanggapan bertambah
tanpa batas. Berikut adalah nilai satuan berbagai nilai ζ pada gambar 2.2 berikut.
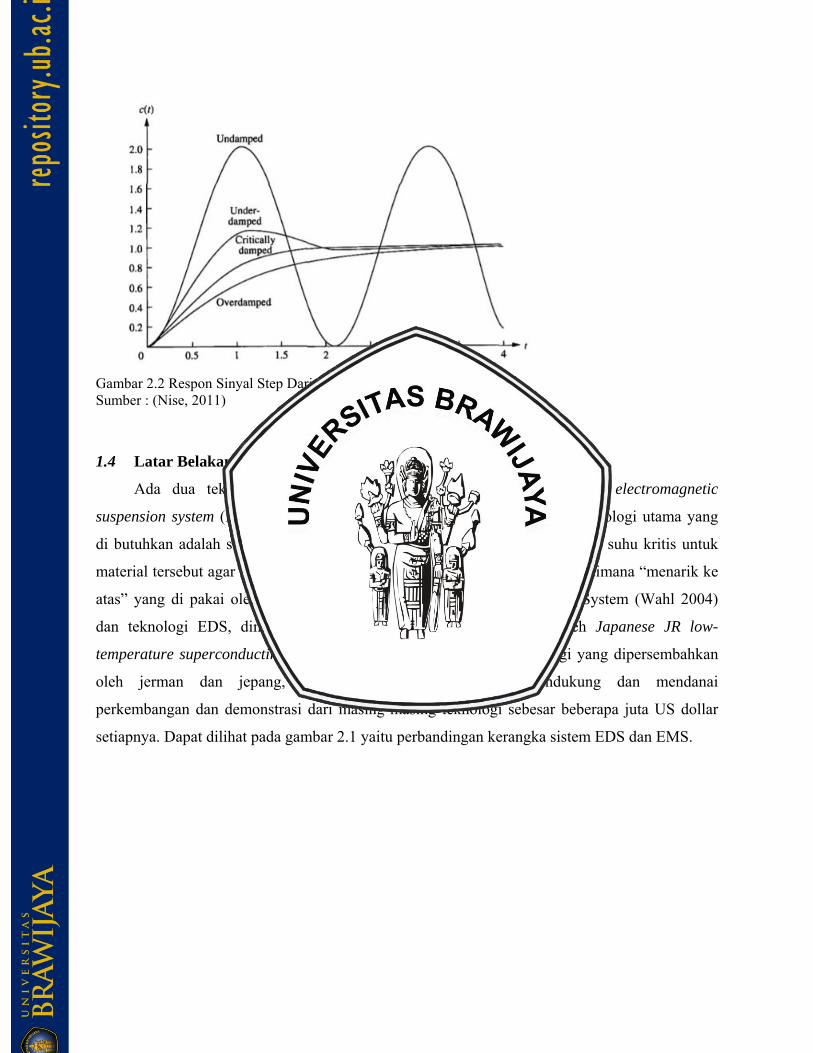
Gambar 2.2 Respon Sinyal Step Dari Sistem Orde Dua Sumber : (Nise, 2011)
1.4 Latar Belakang Teknologi Kereta Magnetic Levitation
Ada dua teknologi utama dalam kereta magnetic levitation yaitu electromagnetic
suspension system (EMS) dan electrodynamic suspension system (EDS).Teknologi utama yang
di butuhkan adalah sifat superkonduktor dimana material tersebut harus pada suhu kritis untuk
material tersebut agar menghasilkan sifat superconducting. Teknologi EMS dimana “menarik ke
atas” yang di pakai oleh German conventional-magnet-based Transrapid System (Wahl 2004)
dan teknologi EDS, dimana “mendorong kebawah”, yang dipakai oleh Japanese JR low-
temperature superconducting system (Miyamoto 2004). Kedua teknologi yang dipersembahkan
oleh jerman dan jepang, masing-masing pemerintahnya mendukung dan mendanai
perkembangan dan demonstrasi dari masing-masing teknologi sebesar beberapa juta US dollar
setiapnya. Dapat dilihat pada gambar 2.1 yaitu perbandingan kerangka sistem EDS dan EMS.
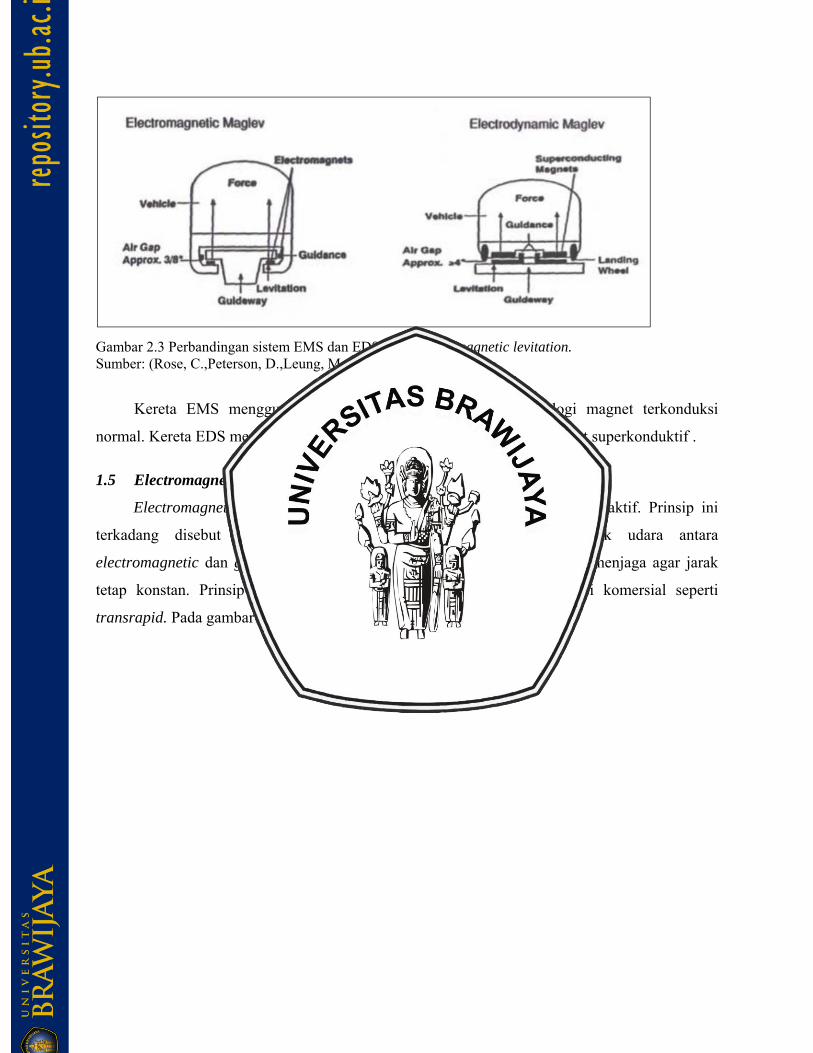
Gambar 2.3 Perbandingan sistem EMS dan EDS pada sistem magnetic levitation. Sumber: (Rose, C.,Peterson, D.,Leung, M. ,2014 )
Kereta EMS menggunakan temperatur suhu ruangan. Teknologi magnet terkonduksi
normal. Kereta EDS menggunakan keduanya yaitu suhu ruangan dan magnet superkonduktif .
1.5 Electromagnetic Suspension
Electromagnetic Suspesion (EMS) bekerja seperti bantalan magnetic aktif. Prinsip ini
terkadang disebut sebagai servo-stabilization. Sensor mengukur jarak udara antara
electromagnetic dan guideway. Sistem kontrol pada EMS berfungsi untuk menjaga agar jarak
tetap konstan. Prinsip kerja ini sangat sering digunakan dalam aplikasi komersial seperti
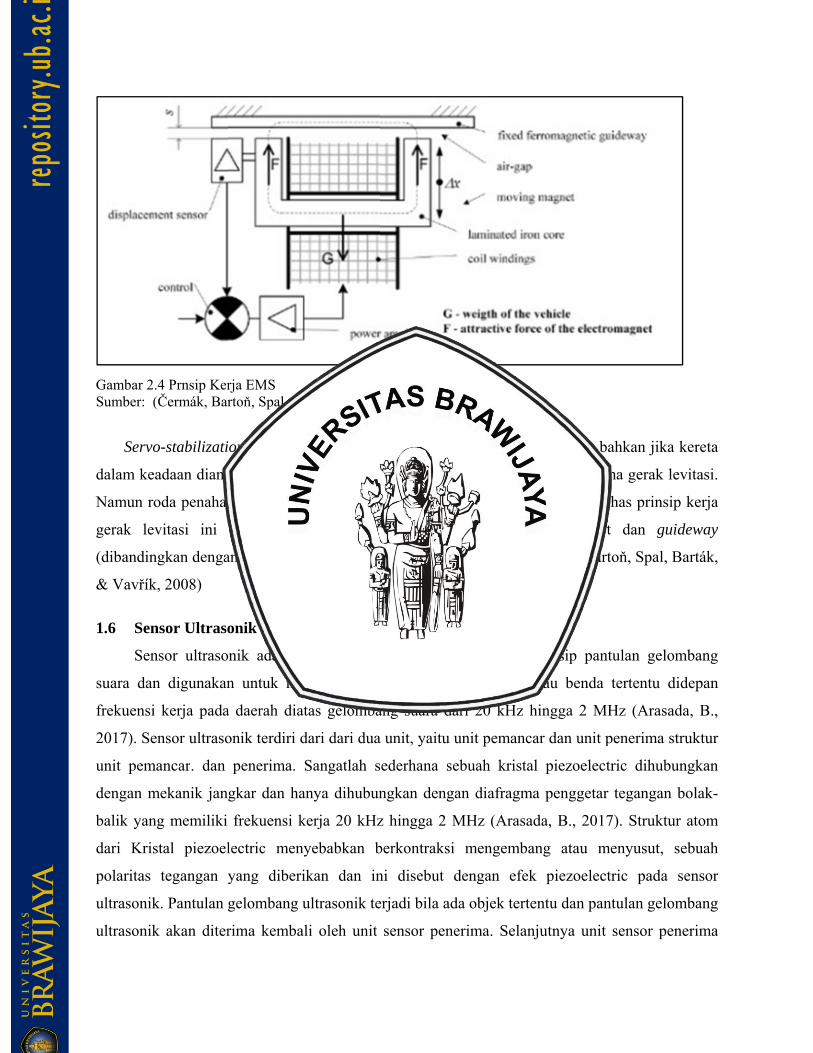
transrapid. Pada gambar 2.2 dapat dilihat prinsip kerja dari sistem EMS.
Gambar 2Sumber:
Serv
dalam ke
Namun r
gerak le
(dibandin
& Vavřík
1.6 Sen
Sen
suara da
frekuensi
2017). Se
unit pem
dengan m
balik yan
dari Kri
polaritas
ultrasonik
ultrasonik
2.4 Prnsip Ker(Čermák, Bar
vo-stabilizati
eadaan diam
roda penahan
evitasi ini
ngkan denga
k, 2008)
nsor Ultraso
nsor ultraso
an digunakan
i kerja pada
ensor ultraso
mancar. dan
mekanik jan
ng memiliki
stal piezoel
tegangan y
k. Pantulan g
k akan diter
rja EMS rtoň, Spal, Ba
ion mampu m
m. Maka roda
n untuk kebu
untuk kebu
an EDS) dan
onik
nik adalah
n untuk me
a daerah diat
onik terdiri d
penerima.
gkar dan ha
frekuensi k
lectric meny
yang diberi
gelombang u
rima kembal
arták, & Vavř
menahan bo
a tidak diper
utuhan kese
utuhan jarak
n adanya feed
sensor yang
endeteksi ke
tas gelomba
dari dari dua
Sangatlah s
anya dihubun
kerja 20 kHz
yebabkan b
ikan dan in
ultrasonik te
li oleh unit
řík, 2008)
dy dalam po
rlukan untuk
lamatan bia
k yg lebih
dback contro
g bekerja b
eberadaan su
ang suara da
a unit, yaitu u
ederhana se
ngkan denga
z hingga 2 M
berkontraksi
ni disebut d
erjadi bila ad
sensor pene
osisi yang di
k menjalakan
sanya digun
h dekat ant
ol system. (Č
erdasarkan
uatu objek a
ari 20 kHz h
unit pemanc
ebuah krista
an diafragm
MHz (Arasa
mengemba
dengan efek
da objek terte
erima. Selan
iinginkan. ba
n fungsi utam
nakan. Ciri k
tara magnet
Čermák, Bart
prinsip pant
atau benda
hingga 2 MH
ar dan unit p
al piezoelect
ma penggetar
ada, B., 2017
ang atau m
k piezoelect
entu dan pan
njutnya unit
ahkan jika k
ma gerak lev
khas prinsip
t dan guid
toň, Spal, Ba
tulan gelom
tertentu did
Hz (Arasada
penerima str
tric dihubun
r tegangan b
7). Struktur
menyusut, se
tric pada se
ntulan gelom
sensor pene
kereta
vitasi.
kerja
deway
arták,
mbang
depan
a, B.,
ruktur
ngkan
bolak-
atom
ebuah
ensor
mbang
erima
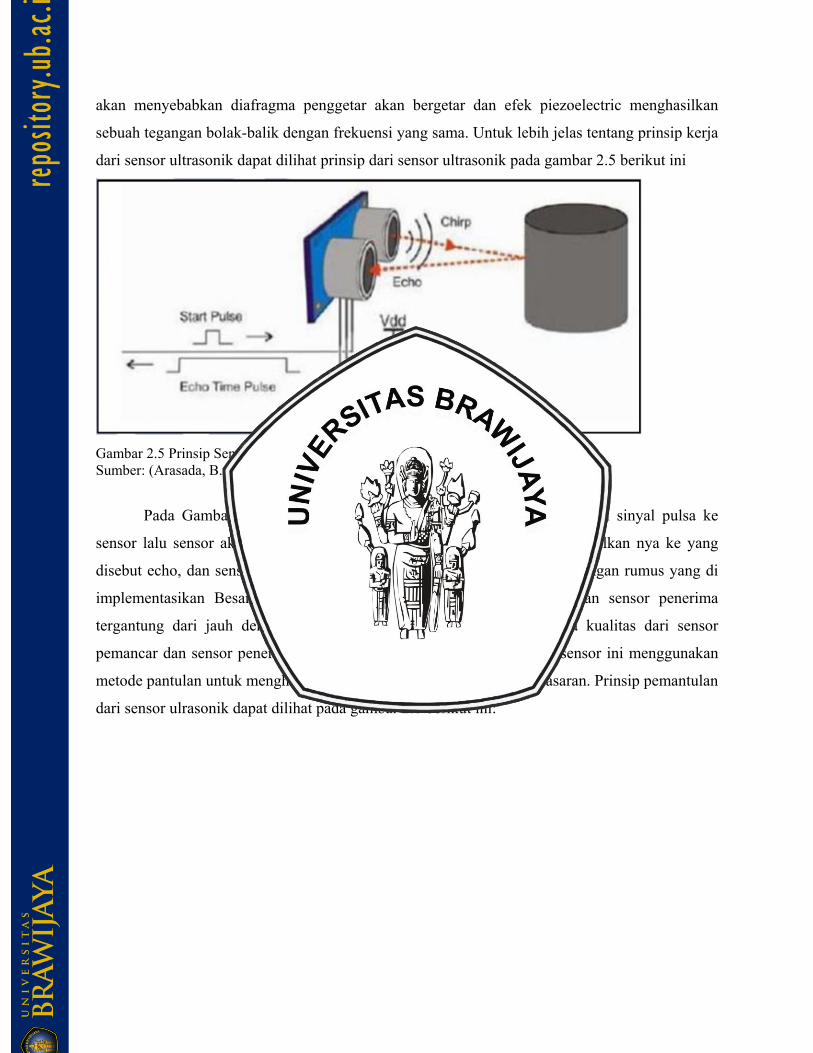
akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan
sebuah tegangan bolak-balik dengan frekuensi yang sama. Untuk lebih jelas tentang prinsip kerja
dari sensor ultrasonik dapat dilihat prinsip dari sensor ultrasonik pada gambar 2.5 berikut ini
Gambar 2.5 Prinsip Sensor Ultrasonik Sumber: (Arasada, B.,2017)
Pada Gambar 2.5. dijelaskan bahwa pada saat arduino mengirimkan sinyal pulsa ke
sensor lalu sensor akan mengirimkan sinyal chirp infra merah dan memantulkan nya ke yang
disebut echo, dan sensor akan mendapatkan pantulan sesuai dengan perhitungan rumus yang di
implementasikan Besar amplitudo sebuah sinyal elektrik yang dihasilkan sensor penerima
tergantung dari jauh dekatnya sebuah objek yang akan dideteksi serta kualitas dari sensor
pemancar dan sensor penerima. Proses sensoring yang dilakukan pada sensor ini menggunakan
metode pantulan untuk menghitung jarak antara sensor dengan objek sasaran. Prinsip pemantulan
dari sensor ulrasonik dapat dilihat pada gambar 2.6 berikut ini:
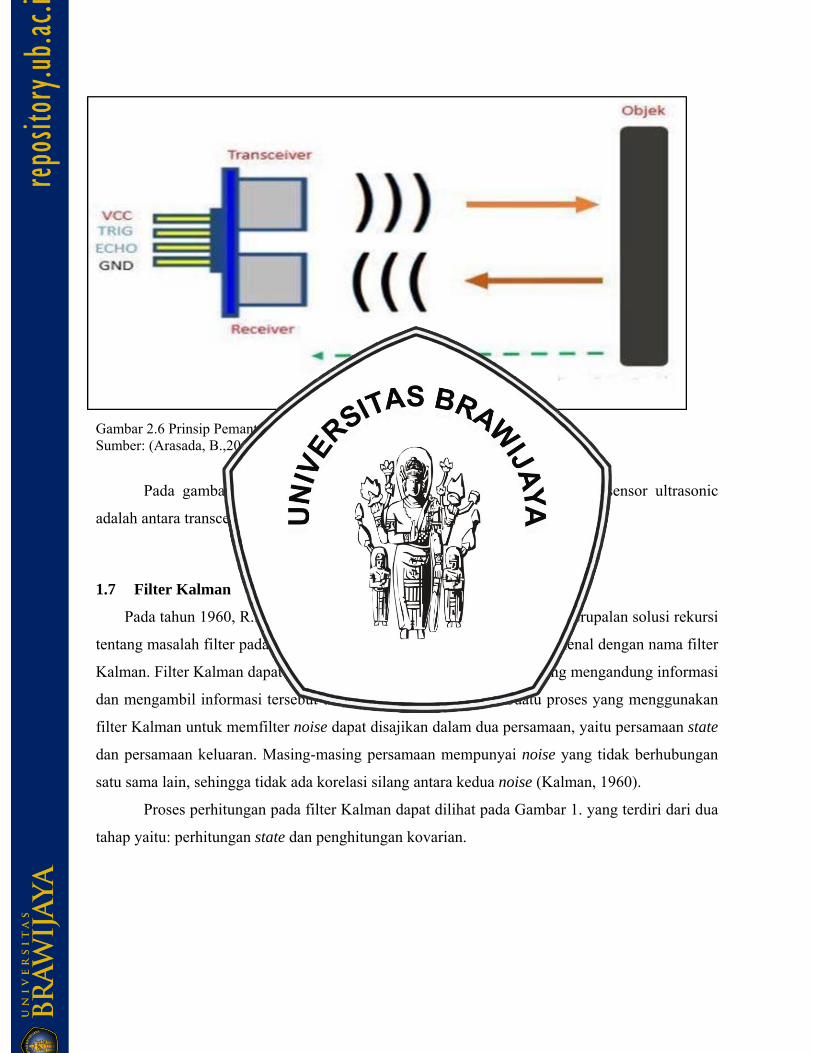
Gambar 2.6 Prinsip Pemantulan Ultrasonik Sumber: (Arasada, B.,2017)
Pada gambar 2.6 dijelaskan bahwa referensi jarak dari pengukuran sensor ultrasonic
adalah antara transceiver dan receiver sampai dengan objek.
1.7 Filter Kalman
Pada tahun 1960, R.E. Kalman mempublikasikan makalahnya yang merupalan solusi rekursi
tentang masalah filter pada proses yang linier, sehingga filter tersebut dikenal dengan nama filter
Kalman. Filter Kalman dapat menghilangkan noise dari suatu sinyal yang mengandung informasi
dan mengambil informasi tersebut untuk diproses lebih lanjut. Suatu proses yang menggunakan
filter Kalman untuk memfilter noise dapat disajikan dalam dua persamaan, yaitu persamaan state
dan persamaan keluaran. Masing-masing persamaan mempunyai noise yang tidak berhubungan
satu sama lain, sehingga tidak ada korelasi silang antara kedua noise (Kalman, 1960).
Proses perhitungan pada filter Kalman dapat dilihat pada Gambar 1. yang terdiri dari dua
tahap yaitu: perhitungan state dan penghitungan kovarian.
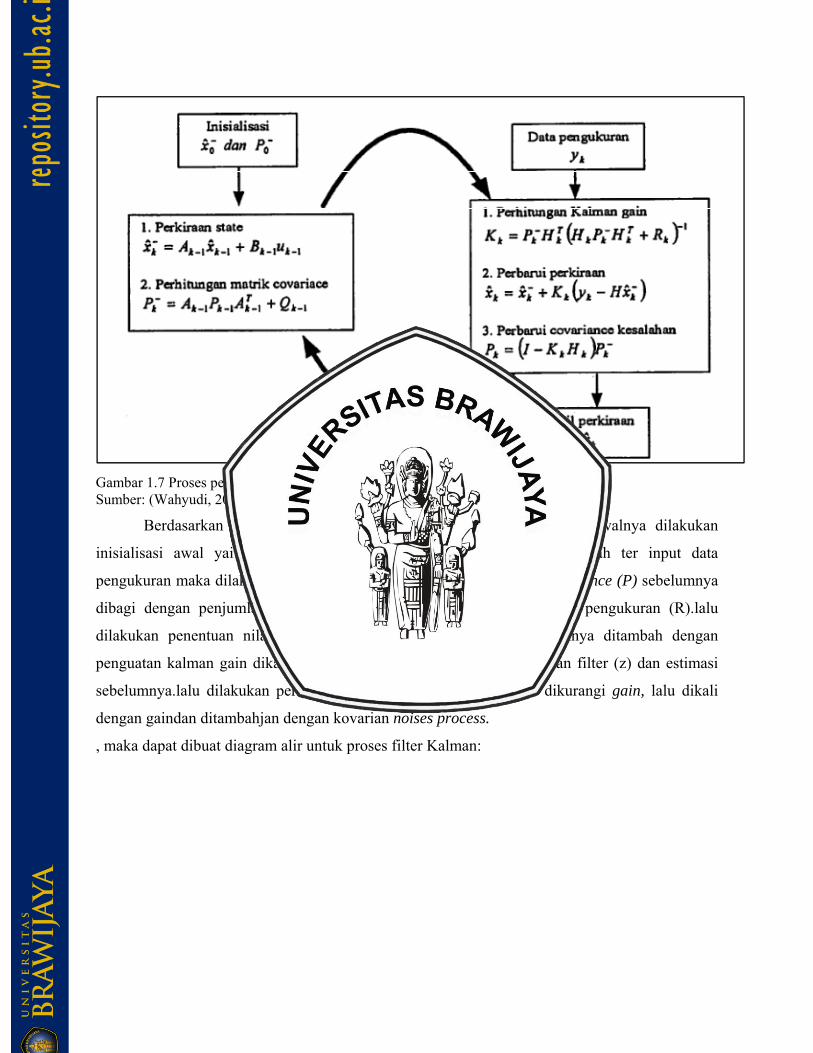
Gambar 1.7 Proses penghitungan pada Kalman filter Sumber: (Wahyudi, 2009)
Berdasarkan proses perhitungan pada gambar Gambar 1.7 Pada awalnya dilakukan
inisialisasi awal yaitu nilai x, lalu dimasukkan data pengukuran, setelah ter input data
pengukuran maka dilakukan perhitungan kalman gain, dengan error covariance (P) sebelumnya
dibagi dengan penjumlahan error covariance ditambah kovarian noise pengukuran (R).lalu
dilakukan penentuan nilai estimasi (X), yaitu nilai estimasi sebelumnya ditambah dengan
penguatan kalman gain dikali pengurangan antara nilai masukan kalman filter (z) dan estimasi
sebelumnya.lalu dilakukan perhitungan error covariance dengan 1 dikurangi gain, lalu dikali
dengan gaindan ditambahjan dengan kovarian noises process.
, maka dapat dibuat diagram alir untuk proses filter Kalman:
Gambar 1Sumber: (
.8 Diagram a(Wahyudi, 20
alir pada kalm009)
man filter
BAB III
BAB 1 METODE PENELITIAN
Penyusunan proposal ini didasarkan dalam masalah yang bersifat aplikatif, yaitu
perencanaan dan perealisasian alat agar dapat bekerja sesuai dengan yang direncanakan dengan
mengacu pada rumusan masalah. Langkah-langkah yang perlu dilakukan untuk merealisasikan
alat yang dirancang adalah penentuan spesifikasi alat, perancangan dan pembuatan alat,
pengujian alat, dan pengambilan kesimpulan.
1.1 Spesifikasi Alat
Rancang bangun gerak levitasi pada kereta maglev ini memiliki spesifikasi sebagai berikut:
• Mampu mensimulasikan gerak levitasi pada kereta maglev pada umumnya.
• Mampu menjaga jarak antara gerbong dan jalur sekitar 10mm.
• Dapat beradaptasi dengan gangguan yang diberikan.
• Dapat mengambil data hasil yang dihasilkan.
Dan memiliki spesifikasi kontrol sebagai berikut:
• Respon transient pada prototipe ini adalah Underdamped Response karena memiliki
overshoot, dan memiliki efek osilasi.
• Memiliki respon cepat, sistem ini memiliki rise time rata - rata < 3 detik, dan
settling time rata – rata < 5 detik.
• Sistem ini memiliki error steady state sebesar < 5 %.
1.2 Perancangan dan Pembuatan Alat
1. Perancangan dan pembuatan alat terbagi atas perangkat keras (hardware) dan perangkat
lunak. (software). Dalam perancangan ini akan digunakan 3 komponen utama yaitu:
Sensor, Mikrokontroler dan Plant Kereta.
2. Sensor: Digunakan untuk mendapatkan nilai posisi ketinggian levitasi yang di atur
sedemikian rupa, bagian ini sebagai masukan system.
3. Mikrokontroler: Sebagai pusat pemrosesan data, proses yang akan dikerjakan pada
bagian ini adalah sebagai berikut:
• Melakukan kontrol PID pada arus agar jarak antara guideway dan gerbong kereta
tetap stabil.
13
• Mengatur nilai keluaran arus agar jarak antara guideway dan gerbong kereta
sesuai dengan nilai keluaran yang diinginkan.
• Membaca nilai sensor sebagai referensi nilai ketinggian gerbong.
4. Plant Kereta : sebagai objek yang terkontrol.
• Pembacaan posisi
Ketika badan kereta mendekati sensor maka sensor secara otomatis akan menangkap jarak
yang dihitung oleh sensor sebesar waktu pantulan gelombang yang di hasilkan antara gelombang
yang dikeluarkan oleh sensor dan gelombang pantulan yang ditangkap oleh sensor lagi, ketika
sensor mulai menjauh maka magnet akan diperbesar dengan menginput nilai digital sesuai
dengan keadaan. Ketika magnet terlalu dekat maka akan ada sensor tambahan sebagai pembatas
posisi kereta agar tidak terjadi overlap dan mencegah terjadinya kereta terlalu dekat dan terlalu
jauh dari jarak guideway. Pada gambar 3.1 dapat di perhatikan konsep dari pembancaan posisi
badan kereta.
Gambar 3.1 Konsep pembacaan posisi Sumber: Perancangan
• Skema Pengontrolan Alat
Konsep pengontrolan alat ini berdasarkan jarak guideway dengan kereta yang diinginkan,
dengan nilai yang sudah ditentukan, konsep skema kontrol ini berfungsi untuk menpatkan hasil
keluaran yang diinginkan yaitu proses simulasi gerak levitasi kereta maglev. Dapat di perhatikan
pada gambar 3.2 sebuah blok diagram dari sestem kereta maglev yang dirancang pada prototipe
ini.
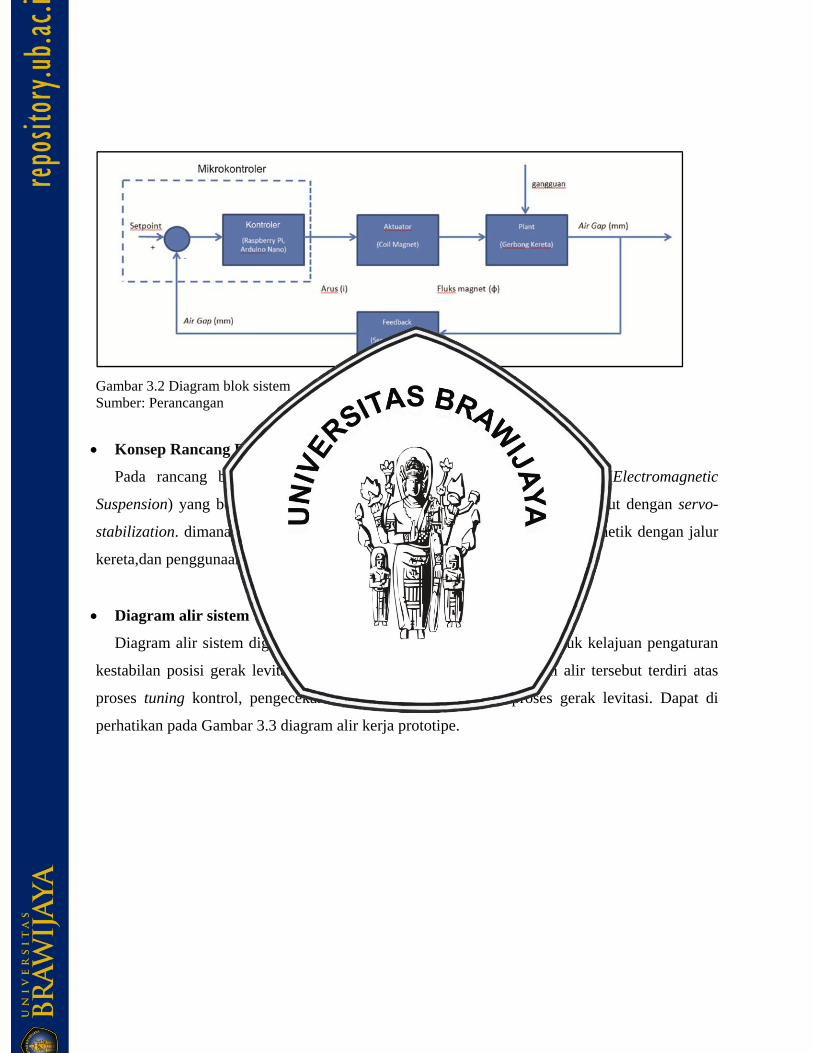
Gambar 3.2 Diagram blok sistem Sumber: Perancangan
• Konsep Rancang Bangun
Pada rancang bangun ini penggunaan prinsipnya yaitu secara EMS (Electromagnetic
Suspension) yang bekerja seperti bantalan magnet. Prinsip ini juga bisa disebut dengan servo-
stabilization. dimana sensor bekerja untuk mengukur jarak antara elektromagnetik dengan jalur
kereta,dan penggunaan sensor sebagai pengukur jarak kereta dengan guideway
• Diagram alir sistem
Diagram alir sistem digunakan sebagai acuan pembuatan progam untuk kelajuan pengaturan
kestabilan posisi gerak levitasi pada simulasi kereta maglev. Diagram alir tersebut terdiri atas
proses tuning kontrol, pengecekan arus, antisipasi gangguan, proses gerak levitasi. Dapat di
perhatikan pada Gambar 3.3 diagram alir kerja prototipe.
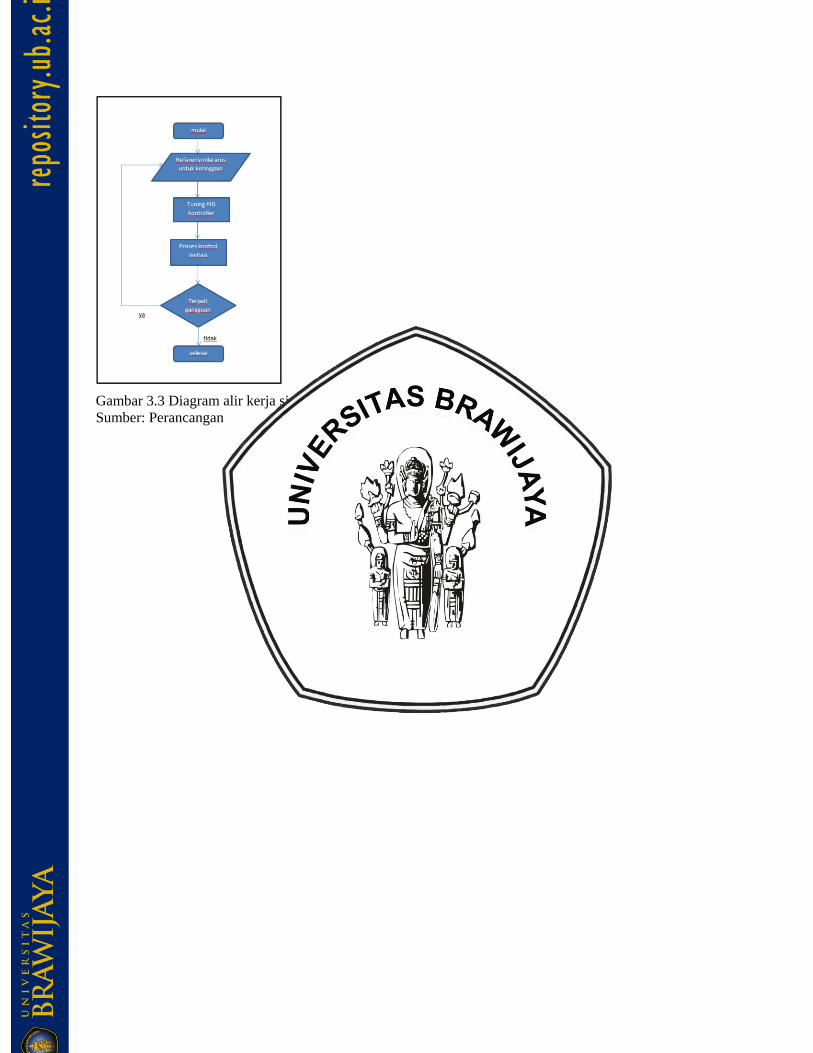
Gambar 3.3 Diagram alir kerja sistem prototipe Sumber: Perancangan
BAB IV
BAB 1 HASIL DAN PEMBAHASAN
Pembuatan rancang bangun ini akan meliputi beberapa pembahasan dan hasil dari beberapa
pengujian. Pertama, yaitu menghasilkan suatu keluaran berupa penjalasan prinsip kerja
komponen penggerak utama dari fisik rancang bangun kereta. Kedua, yaitu Pengujian Nilai
Tegangan Dan Arus Terhadap Nilai Pulsa yang Diberikan Mikrokontroller. Ketiga, adalah
Pengujian Nilai Jarak Ketinggian Terhadap Nilai PWM. Keempat adalah Penentuan Nilai PID
untuk Proses Pengendalian Pada Kereta Maglev. Terakhir adalah Pengujian Respon Sistem Awal
Dengan Setpoint Berbeda.
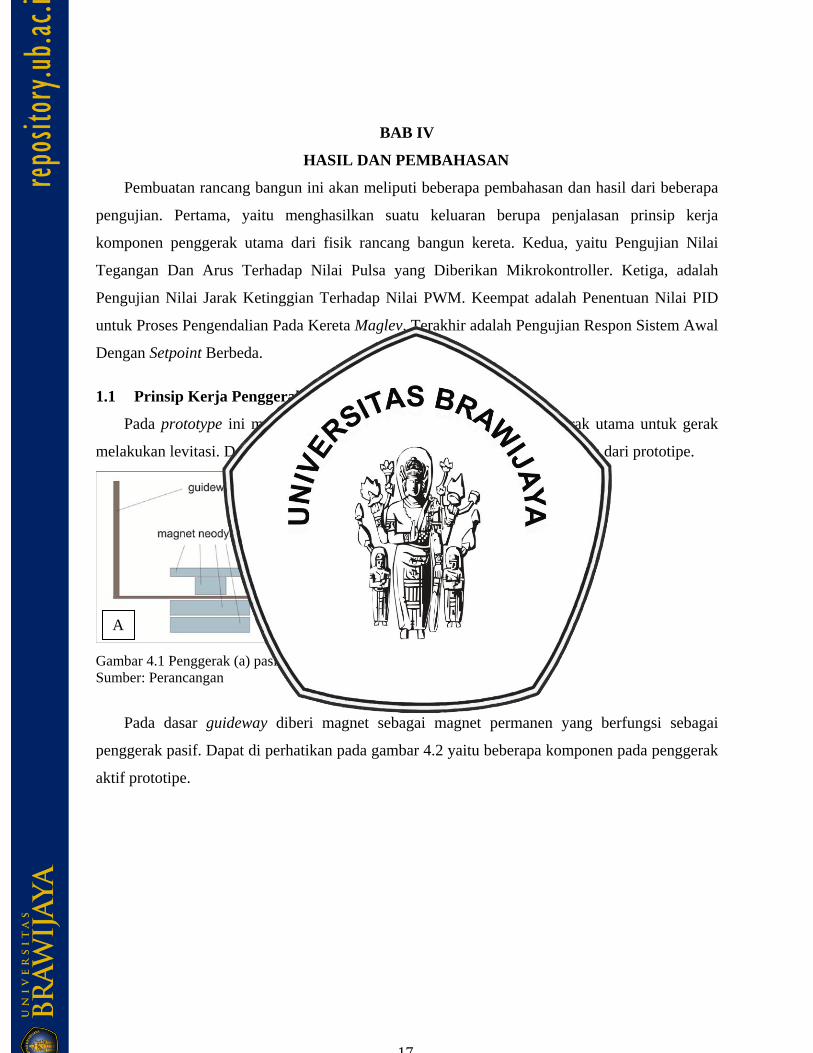
1.1 Prinsip Kerja Penggerak Utama Rancang Bangun Kereta
Pada prototype ini menggunakan kumparan magnet sebagai penggerak utama untuk gerak
melakukan levitasi. Dapat di perhatikan pada gambar 4.1 dua penggerak utama dari prototipe.
Gambar 4.1 Penggerak (a) pasif kereta dan (b) badan kereta Sumber: Perancangan
Pada dasar guideway diberi magnet sebagai magnet permanen yang berfungsi sebagai
penggerak pasif. Dapat di perhatikan pada gambar 4.2 yaitu beberapa komponen pada penggerak
aktif prototipe.
A B
17
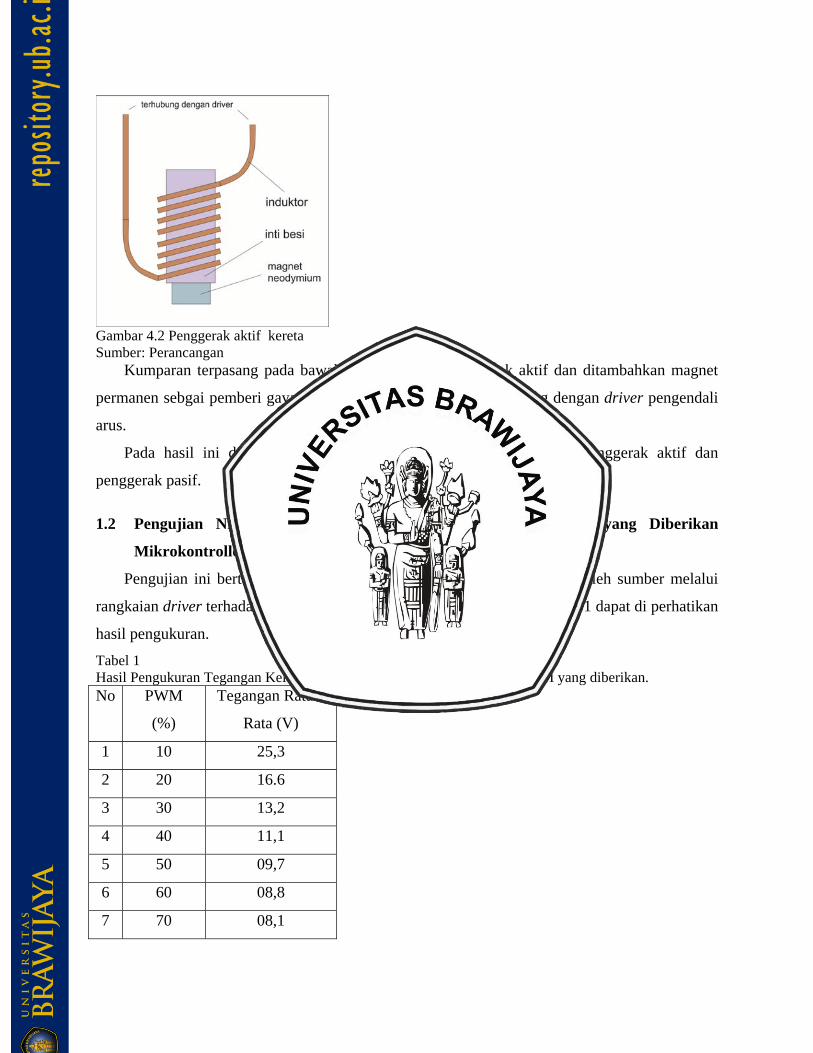
Gambar 4.2 Penggerak aktif kereta Sumber: Perancangan
Kumparan terpasang pada bawah kereta sebagai penggerak aktif dan ditambahkan magnet
permanen sebgai pemberi gaya tolak awal dari kereta yang terhubung dengan driver pengendali
arus.
Pada hasil ini didapatkan sebuah prinsip kerja gaya tolak antara penggerak aktif dan
penggerak pasif.
1.2 Pengujian Nilai Tegangan Dan Arus Terhadap Nilai Pulsa yang Diberikan
Mikrokontroller
Pengujian ini bertujuan mengetahui output tegangan yang dihasilkan oleh sumber melalui
rangkaian driver terhadap perubahan PWM dari mikrokontroller. Dari tabel 1 dapat di perhatikan
hasil pengukuran.
Tabel 1 Hasil Pengukuran Tegangan Keluaran dengan pengaruh terhadap sinyal PWM yang diberikan. No PWM
(%)
Tegangan Rata –
Rata (V)
1 10 25,3
2 20 16.6
3 30 13,2
4 40 11,1
5 50 09,7
6 60 08,8
7 70 08,1
8 80 07,5
9 90 07,1
10 100 06,6
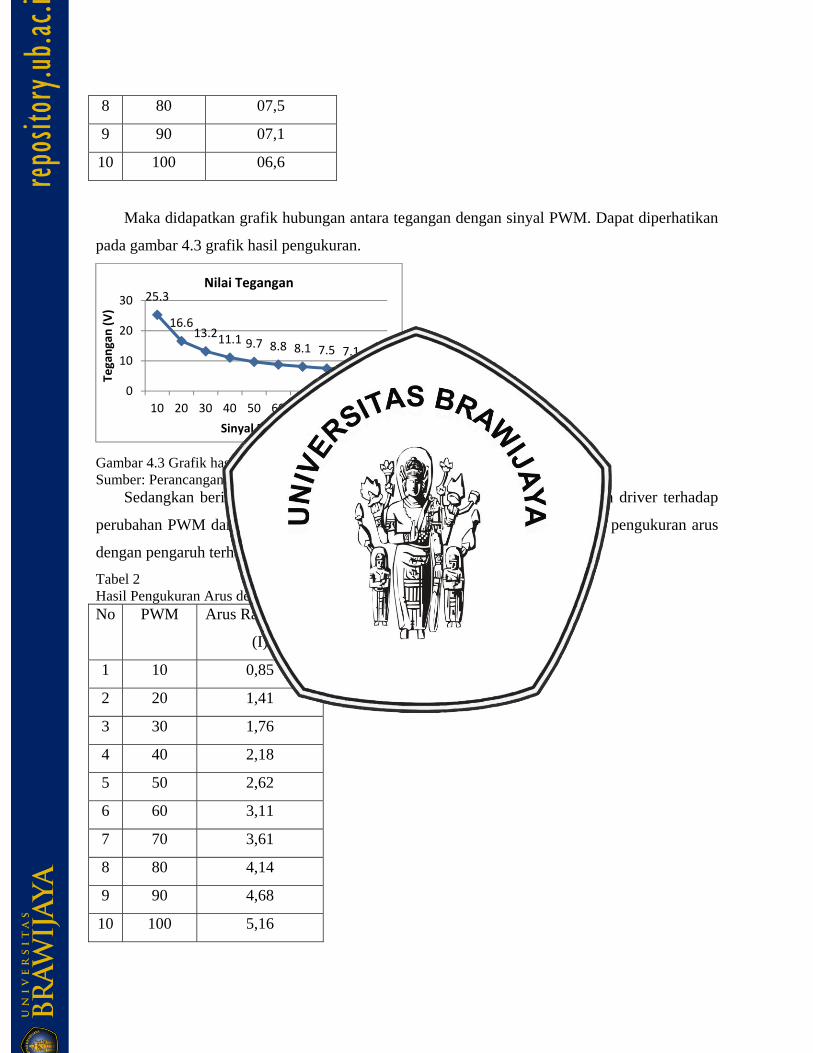
Maka didapatkan grafik hubungan antara tegangan dengan sinyal PWM. Dapat diperhatikan
pada gambar 4.3 grafik hasil pengukuran.
Gambar 4.3 Grafik hasil pengukuran keluaran tegangan dengan pengaruh sinyal PWM Sumber: Perancangan
Sedangkan berikut adalah Arus yang dihasilkan sumber melalui rangkaian driver terhadap
perubahan PWM dari mikrokontroller. Dapat di perhatikan pada Tabel 2 hasil pengukuran arus
dengan pengaruh terhadap sinyal PWM yang diberikan.
Tabel 2 Hasil Pengukuran Arus dengan Pengaruh Terhadap Sinyal PWM yang Diberikan No PWM Arus Rata – Rata
(I)
1 10 0,85
2 20 1,41
3 30 1,76
4 40 2,18
5 50 2,62
6 60 3,11
7 70 3,61
8 80 4,14
9 90 4,68
10 100 5,16
25.3
16.613.211.1 9.7 8.8 8.1 7.5 7.1 6.6
0
10
20
30
10 20 30 40 50 60 70 80 90 100
Tegangan
(V)
Sinyal PWM (%)
Nilai Tegangan
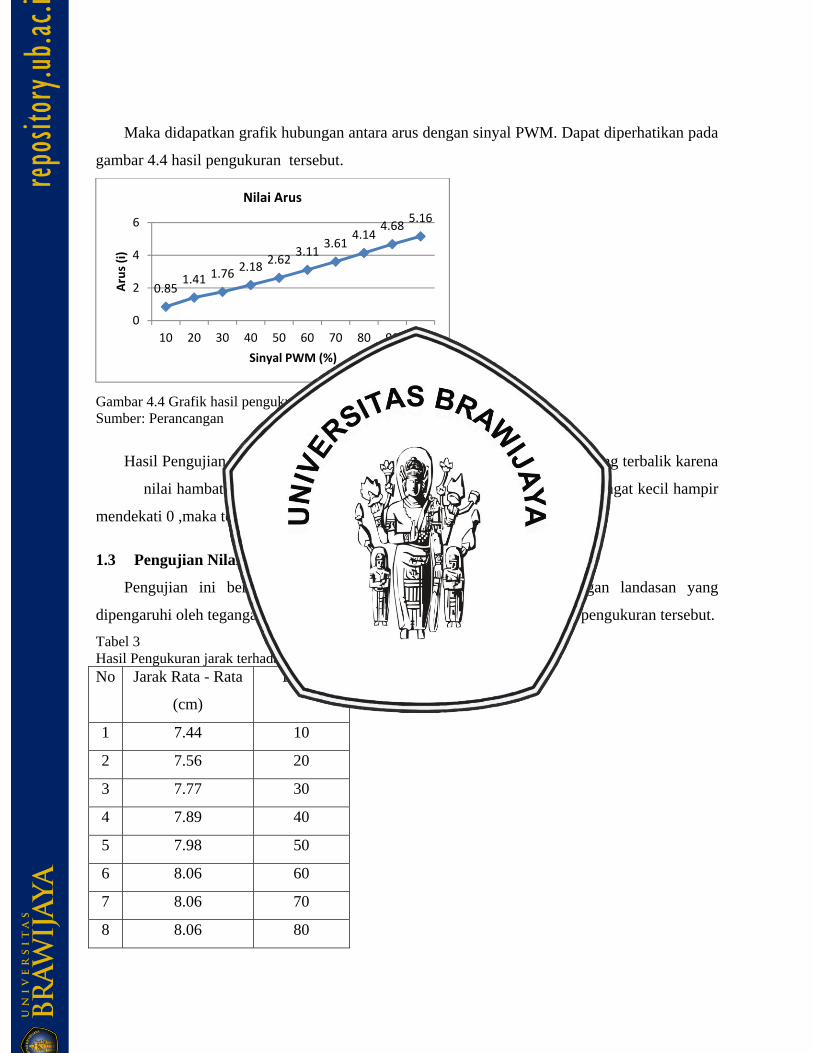
Maka didapatkan grafik hubungan antara arus dengan sinyal PWM. Dapat diperhatikan pada
gambar 4.4 hasil pengukuran tersebut.
Gambar 4.4 Grafik hasil pengukuran arus dengan pengaruh sinyal PWM Sumber: Perancangan
Hasil Pengujian menunjukkan bahwa keluaran tegangan dan arus berbanding terbalik karena
nilai hambatan dari kumparan yang dikendalikan oleh driver bernilai sangat kecil hampir
mendekati 0 ,maka terjadi drop voltage.
1.3 Pengujian Nilai Jarak Ketinggian Terhadap Nilai PWM.
Pengujian ini bertujuan untuk mengetahui nilai jarak kereta dengan landasan yang
dipengaruhi oleh tegangan dan arus. Dapat di perhatikan pada Tabel 3 hasil pengukuran tersebut.
Tabel 3 Hasil Pengukuran jarak terhadap arus yang diberikan. No Jarak Rata - Rata
(cm)
PWM
1 7.44 10
2 7.56 20
3 7.77 30
4 7.89 40
5 7.98 50
6 8.06 60
7 8.06 70
8 8.06 80
0.851.41 1.76 2.18 2.62
3.113.61
4.144.68
5.16
0
2
4
6
10 20 30 40 50 60 70 80 90 100
Arus (i)
Sinyal PWM (%)
Nilai Arus
9 8.10 90
10 8.21 100
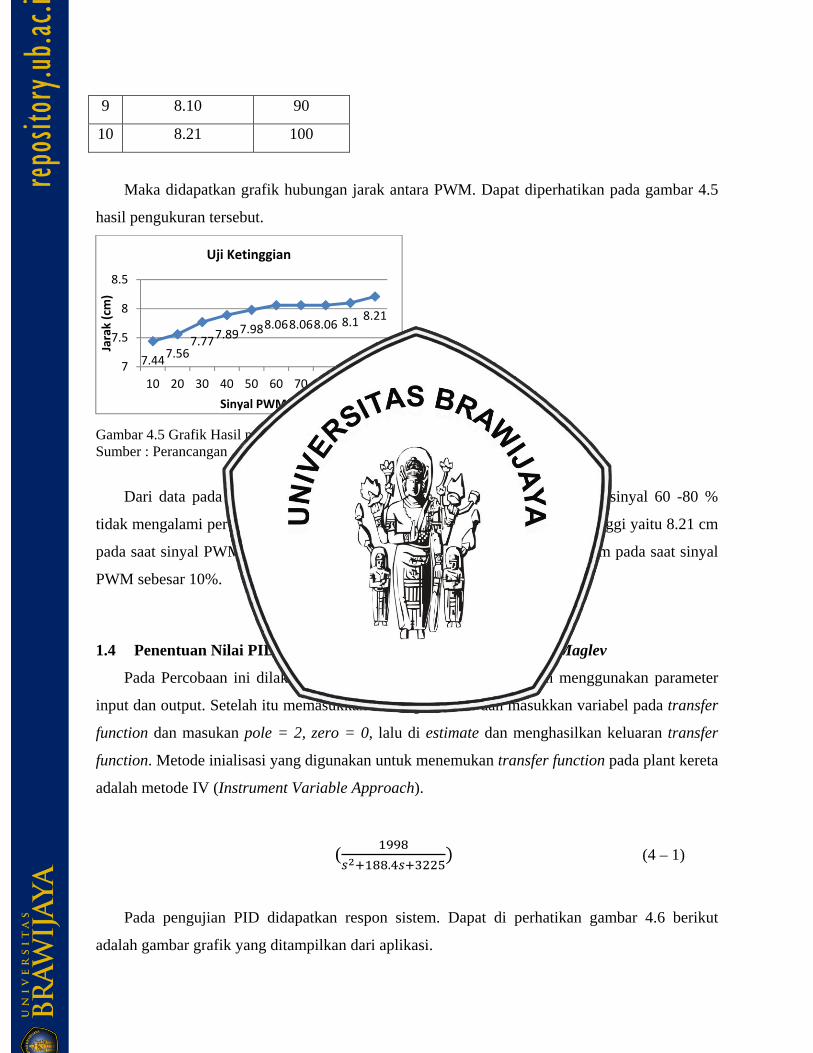
Maka didapatkan grafik hubungan jarak antara PWM. Dapat diperhatikan pada gambar 4.5
hasil pengukuran tersebut.
Gambar 4.5 Grafik Hasil pengukuran jarak terhadap sinyal PWM Sumber : Perancangan
Dari data pada grafik dapat dilihat bahwa nilai ketinggian pada rentang sinyal 60 -80 %
tidak mengalami perubahan yang signifikan. Kereta akan berada di posisi tertinggi yaitu 8.21 cm
pada saat sinyal PWM sebesar 100%. Dan posisi terendah kereta yaitu 7.44 cm pada saat sinyal
PWM sebesar 10%.
1.4 Penentuan Nilai PID untuk Proses Pengendalian Pada Kereta Maglev
Pada Percobaan ini dilakukan penentuan nilai fungsi alih dengan menggunakan parameter
input dan output. Setelah itu memasukkan ke fungsi indent dan masukkan variabel pada transfer
function dan masukan pole = 2, zero = 0, lalu di estimate dan menghasilkan keluaran transfer
function. Metode inialisasi yang digunakan untuk menemukan transfer function pada plant kereta
adalah metode IV (Instrument Variable Approach).
(.
(4 – 1)
Pada pengujian PID didapatkan respon sistem. Dapat di perhatikan gambar 4.6 berikut
adalah gambar grafik yang ditampilkan dari aplikasi.
7.447.567.777.89
7.988.068.068.06 8.1 8.21
7
7.5
8
8.5
10 20 30 40 50 60 70 80 90 100
Jarak (cm)
Sinyal PWM (%)
Uji Ketinggian
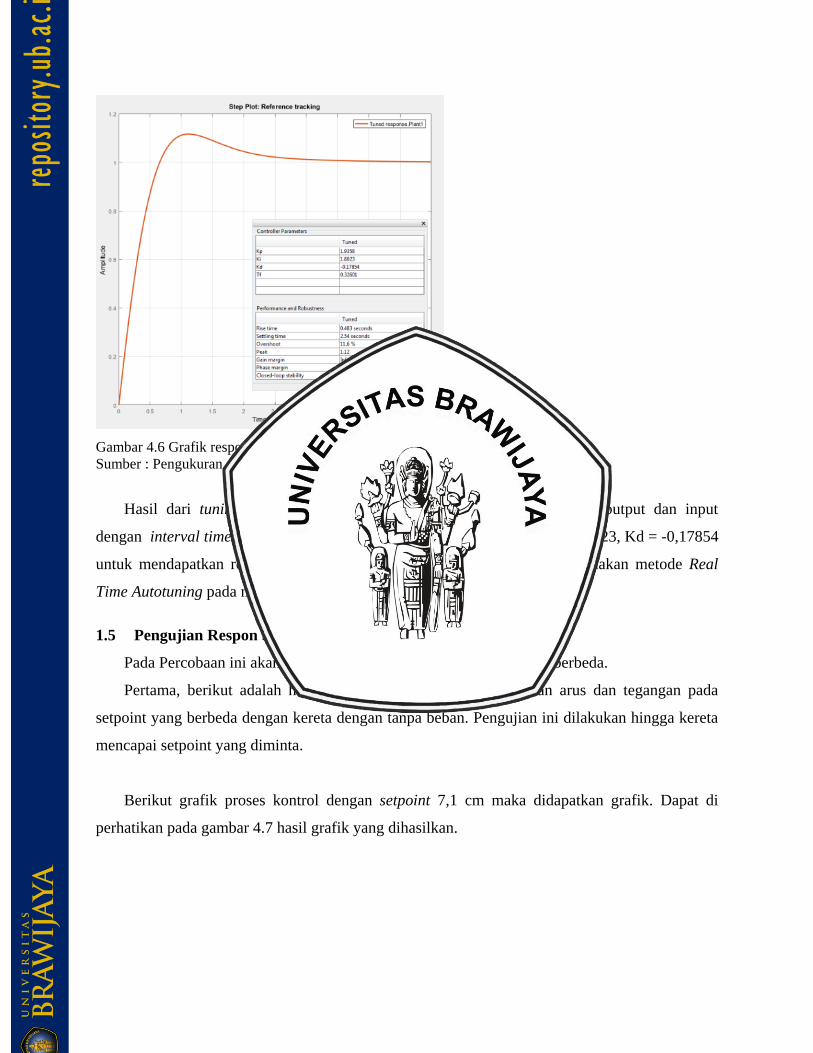
Gambar 4.6 Grafik respon alat dengan PID tuning Sumber : Pengukuran
Hasil dari tuning PID tersebut didapatkan dengan memasukkan nilai output dan input
dengan interval time = 0,05 lalu didapatkan parameter Kp = 1,9358, Ki = 1,8023, Kd = -0,17854
untuk mendapatkan respon seperti pada grafik 4.6. Hasil tersebut menggunakan metode Real
Time Autotuning pada matlab.
1.5 Pengujian Respon Sistem Awal Dengan Setpoint Berbeda
Pada Percobaan ini akan dilakukan beberapa kondisi setpoint yang berbeda.
Pertama, berikut adalah hasil keluaran dari proses pengendalian arus dan tegangan pada
setpoint yang berbeda dengan kereta dengan tanpa beban. Pengujian ini dilakukan hingga kereta
mencapai setpoint yang diminta.
Berikut grafik proses kontrol dengan setpoint 7,1 cm maka didapatkan grafik. Dapat di
perhatikan pada gambar 4.7 hasil grafik yang dihasilkan.
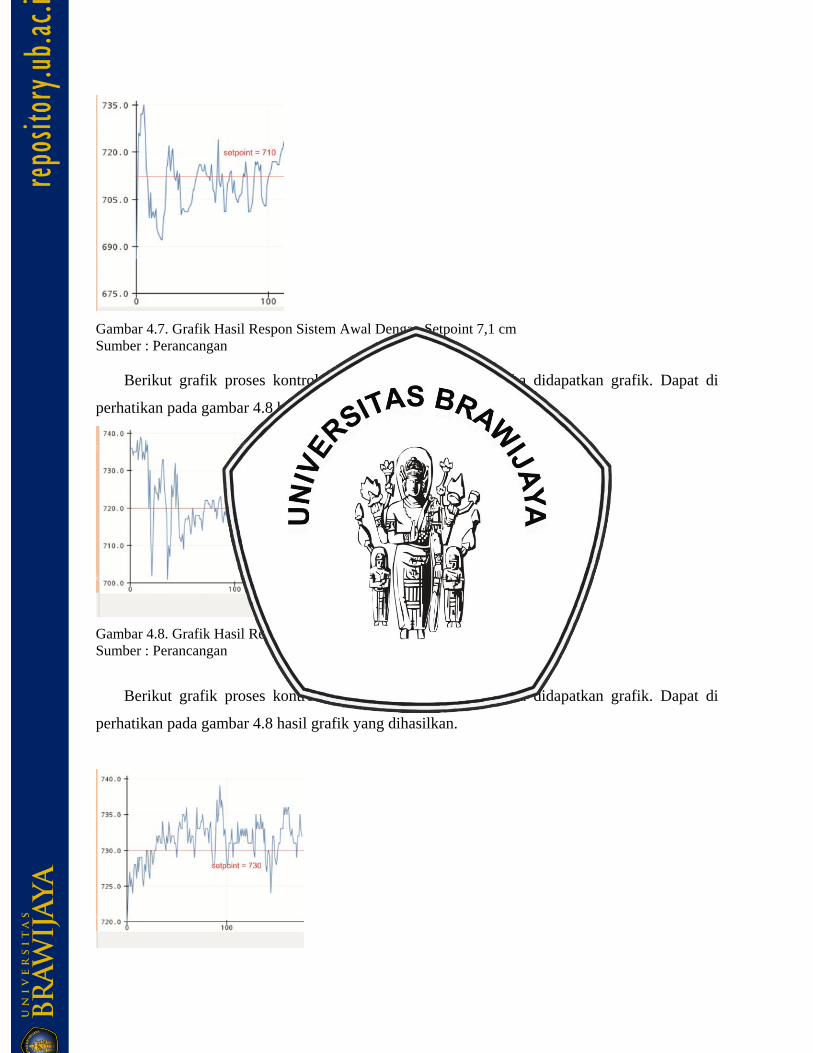
Gambar 4.7. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,1 cm Sumber : Perancangan
Berikut grafik proses kontrol dengan setpoint 7,2 cm maka didapatkan grafik. Dapat di
perhatikan pada gambar 4.8 hasil grafik yang dihasilkan.
Gambar 4.8. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,2 cm Sumber : Perancangan
Berikut grafik proses kontrol dengan setpoint 7,2 cm maka didapatkan grafik. Dapat di
perhatikan pada gambar 4.8 hasil grafik yang dihasilkan.
Gambar 4.9. Grafik Hasil Respon Sistem Awal Dengan Setpoint 7,3 cm Sumber : Perancangan
Pada Pengujian ini dilakukan dengan nilai parameter PID Kp = 1,9358, Ki = 1,8023, Kd = -
0,17854 , dan diketahui sistem dapat menuju setpoint dengan ber osilasi, dan pada pengujian ini
didapatkan data terbaik saat setpoint 7,2 cm.
1.6 Evaluasi Pengujian Sistem
Pada beberapa pengujian sistem terapat beberapa permasalahan yang perlu ditijau ulang :
• Munculnya Panas Pada Aktuator Dan Penyebabnya
Pada percobaan proses kontrol levitasi pada miniatur terdapat kendala panas yang sangat
mempengaruhi kekuatan magnetisasi dan pada akhirnya. Dapat di perhatikan pada gambar 4.10
yaitu sebuah relasi parameter prototipe.
Gambar 4.10. Grafik Relasi Parameter Yang mempengaruhi Sumber : Prancangan
Di grafik dijelaskan bahwa ketika suhu (T) pada aktuator meningkat maka gaya
elektromagnetik (F), arus listrik (I) dan daya (P) akan meurun sesuai dengan meningkatnya suhu.
Jadi dapat disimpulkan aktuator solenoida masih belum bisa bekerja secara efisien karena
dipengaruhi oleh kenaikan suhu.
• Kecocokan Sensor Dengan Sistem
Pada percobaan ini diperlukan presisi dan akurasi yang tinggi agar menghasilkan nilai yang
tepat sebagai pembanding sistem. Dan memerlukan sensor yang tepat untuk penghitung error.
Karena pada sensor yng digunakan pada saat ini hanya memilliki ketelitian diantara jarak 2cm –
400cm, sedangkan ketika kereta dibawah 2cm ,maka akan mengalami kesalahan pembacaan.
• Analisa rugi rugi daya pada aktuator
Pada aktuator memiliki rugi - rugi daya jika dirumuskan adalah :
(4 – 2)
I = adalah arus yang dialirkan pada aktuator dan R adalah resistansi solenoida,jadi ketika
resistansi solenoida semakin besar maka semakin besar juga rugi – rugi daya yang dihasilkan
pada aktuator. Pada percobaan ini memiliki resistansi solenoida relatif tinggi, karena memiliki
jumlah lilitan yang banyak.
BAB V
BAB 1 KESIMPULAN DAN SARAN
1.1 Kesimpulan
Setelah dilakukan penelitian dengan pengambilan data dan perhitungan parameter serta
analisis, maka dapat disimpulkan sebagai berikut:
1. Nilai Tegangan dan Arus pada saat Sinyal PWM maksimal adalah 06,6 V dan 5.16 A. Pada
saat Sinyal PWM Minimim adalah 25.3 V dan 0.85 A.
2. Jarak tertinggi yang dapat di capai oleh kereta adalah 8.21 cm diatas lintasan dengan
parameter PID kontrol yang didapatkan Kp = 1.9358, Ki = 1.8023, Kd = -0.17854
3. Sistem miniatur ini dapat bekerja dengan setpoint tertentu yaitu dengan batas dan jarak
tertentu
4. Sistem pada miniatur kereta ini memiliki respon yang relatif cepat dan memiliki overshoot.
1.2 Saran
Berdasarkan kesimpulan yang telah diperoleh, terdapat beberapa aspek yang masih dapat
diteliti dan dilakukan analisis lebih mndalam, penulis menyarankan untuk :
1. Menggunakan Sumber Tegangan dan Arus lebih besar sehingga dapat menghasilkan
perubahan yang lebih signifikan.
2. Mendesain badan kereta dengan bahan yang lebih ringan agar mengurangi beban yang dapat
menambah efisiensi kontrol dari kereta.
3. Menggunakan kontroler lebih baik agar mengurai error yang didaptkan pada proses
pengendalian.
DAFTAR PUSTAKA
Arasada, B. (2017). APLIKASI SENSOR ULTRASONIK UNTUK DETEKSI POSISI JARAK
PADA RUANG MENGGUNAKAN ARDUINO UNO. Fakultas Teknik, Universitas Negeri
Surabaya
Čermák, R., Bartoň, L., Spal, P., Barták, J., & Vavřík, J. (2008). OVEVIEW OF MAGNETIC
LEVITATION PRINCIPLES AND THEIR APPLICATION IN MAGLEV TRAINS.
ADVANCED ENGINEERING 2(2008)1,ISSN 1846-5900, 22.
Hasan (2018). PEMBACA KELAJUAN KENDARAAN MENGGUNAKAN
IMU (Inertial Measuring Unit). Brawijaya University Department Of Engineering.
Laksono, D. (2014). SISTEM KENDALI. GRAHA ILMU, 57 – 99.
Lee, Y., & Lee, S. (2006). Review Of Maglev Train Technologies. IEEE, 1 - 9.
Miyamoto, S., (2004).The Status of the Running Tests of the JR MagLev. MagLev 2004
Proceedings, 60.
Nise, N. (2011). CONTROL SYSTEM ENGINEERING SIXTH EDITION. John Wiley & Sons,
Inc (2011). ISBN 13 978-0470-54756-4, 168 - 172
Rose, C.,Peterson, D.,Leung, M. (2014). Implementation Of Cargo Maglev in The United States.
Maglev 2008: 20th International Conference on Maglev Systems and Drivers, 2-8.
Viridi, S. (2010). FISIKA DASAR UNTUK UNIVESITAS. Fakultas Teknologi Industri Institut
Teknologi Bandung,79-80.
Wahl, G. (2004). The MagLev System Transrapid – a Future-oriented technology for Track-
bound Transport Systems. MagLev 2004 Proceedings, 32.
Wahyudi, A. S. (2009). Simulasi Kalman Filter untuk Estimasi Posisi dengan menggunakan
Sensor Accelerometer. Jurnal Techno Science, 350-359.
Related Documents











