Sistem Pengontrol Jarak dengan Kontroler Proporsional Disusun Oleh : Junaidi Sucipto (1122051) Dhiyaa Putri K. (1122053) Ayu Maulidya (1122065) Kelas : B Jurusan Teknik Elektro Fakultas Teknik

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Sistem Pengontrol Jarak dengan Kontroler Proporsional
Disusun Oleh :
Junaidi Sucipto (1122051)
Dhiyaa Putri K. (1122053)
Ayu Maulidya (1122065)
Kelas : B
Jurusan Teknik Elektro
Fakultas Teknik
Universitas Kristen Marantha
Bandung
2013
9
I. Latar Belakang
Sistem pengontrol jarak sering kita temui aplikasinya dalam kehidupan sehari-hari maupun di bidang industri. Contoh paling mudah dari aplikasi sistem ini di kehidupan sehari-hari adalah sistem pengontrol jarak pada sensor parkir mobil. Selain itu sistem pengontrol jarak ini digunakan juga dalam bidang industri, seperti misalnya sistem pengontrol jarak yang dipasang di sistem ban berjalan (conveyor). Setiap sistem pengontrol jarak ini menggunakan sensor dan kontroler yang berbeda, mulai dari yang sederhana hingga rumit, menggunakan rangkaian analog maupun digital. Selain itu cara kerja sistem pengontrol jarak ini pun bermacam-macam. Ada yang berkarakteristik open loop, dimana sistem hanya memiliki kontroler yang diberi suatu set point. Ada juga yang berkarakteristik closed loop, dimana sistem memiliki kontroler yang diberi suatu set point, dan terpasang sensor yang akan membandingkan nilai set point dengan nilai output sebenarnya untuk dibandingkan dan menjadi sinyal kontrol yang baru. Sistem berkarakteristik closed loop ini dapat digunakan pada sistem ban berjalan (conveyor) untuk menggerakkan benda sepanjang conveyor sejauh jarak tertentu yang telah ditentukan sebelumnya.
Terlihat dari penjelasan diatas sistem pengontrol jarak berperan sangat penting dalam kehidupan sehari-hari, baik disadari maupun tidak. Berdasarkan alasan tersebut maka dalam laporan ini akan dijelaskan dan dilakukan simulasi sistem pengontrol jarak sederhana menggunakan kontroler proporsional sehingga dapat mengerti prinsip kerja dan salah satu contoh aplikasi sederhana dari sistem pengontrol jarak.
II. Prinsip Kerja dan Teori 1. Sensor Jarak Ultrasonik
Sensor jarak ultrasonik adalah sensor jarak yang menggunakan prinsip perambatan dan pemantulan gelombang ultrasonik untuk mengukur jarak sensor ke suatu benda yang ada dihadapannya. Sensor tipe ini bekerja dengan mengirimkan seberkas gelombang ultrasonik melalui pemancar (transmitter) yang ada pada badan sensor, lalu selanjutnya diukur waktu yang dibutuhkan hingga diterimanya pantulan dari objek yang akan diukur jaraknya. Lamanya waktu ini sebanding dengan dua kali jarak sensor ke objek, sehingga didapat jarak sensor dengan objek yang dapat dicari melalui persamaan berikut :
Jarak= Kecepatan suara×Waktu pantul2
Laporan Proyek Komponen Sistem Kontrol
9
1.1 Sensor Jarak (Ultrasonik) SRF05
Pada proyek ini digunakan sensor jarak (ultrasonik) tipe SRF05 dengan spesifikasi sebagai berikut :
1. Bekerja pada tegangan DC 5 volt.
2. Beban arus sebesar 30 mA – 50 mA.
3. Menghasilkan gelombang ultrasonik dengan frekuensi 40 KHz.
4. Jangkauan jarak yang dapat dideteksi 3 cm – 400 cm.
5. Membutuhkan input trigger minimal sebesar 10 µS.
6. Dapat digunakan dalam dua pilihan mode yaitu input trigger dan output echo terpasang pada pin yang berbeda atau input trigger dan output echo terpasang dalam satu pin yang sama.
Mode yang digunakan pada proyek ini adalah mode pertama, yaitu input trigger dan echo output terpisah, yang akan dibahas pada sub bab selanjutnya.
1.1.1 Mode 1 - Input Trigger dan Echo Output Terpisah
Pada mode ini untuk mengakses input dan output digunakan pin sensor utrasonik yang berbeda, dan merupakan mode yang paling mudah digunakan. Artinya satu pin akan berfungsi sebagai transmitter dan satu pin sisanya berfungsi sebagai receiver. Jadi antara Triger dan Echo di bedakan.
sumber : http://www.robot-electronics.co.uk/htm/srf05tech.htm
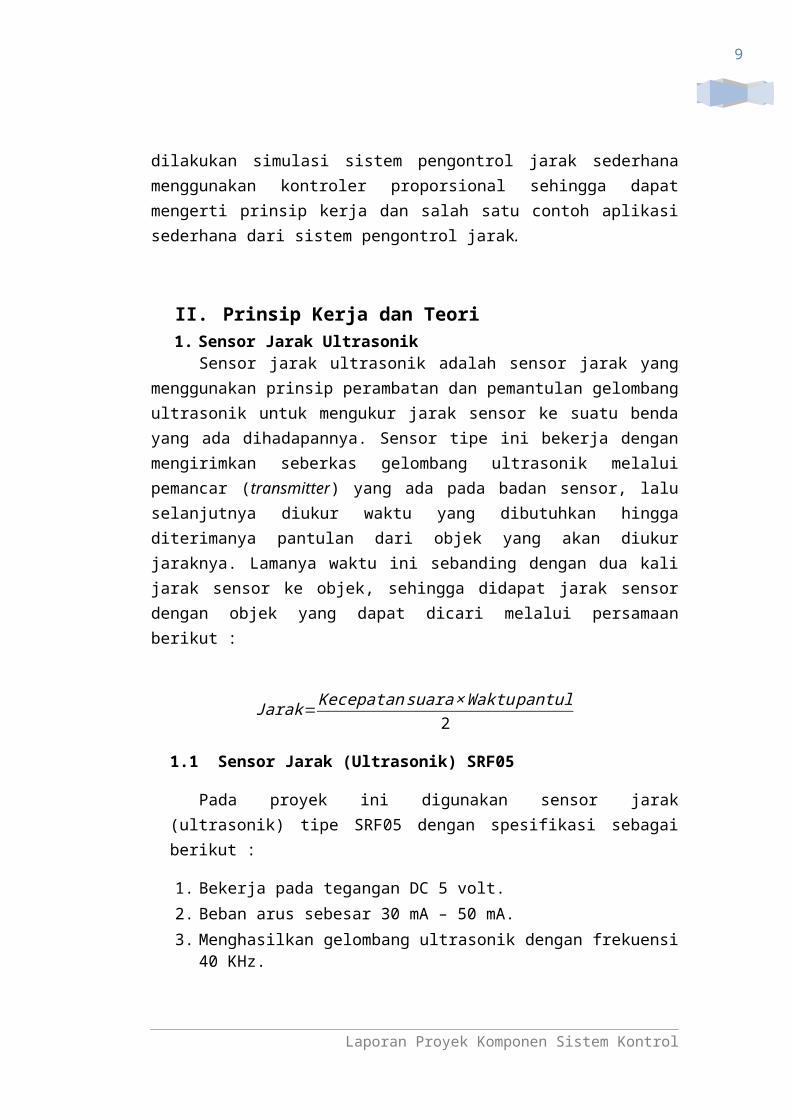
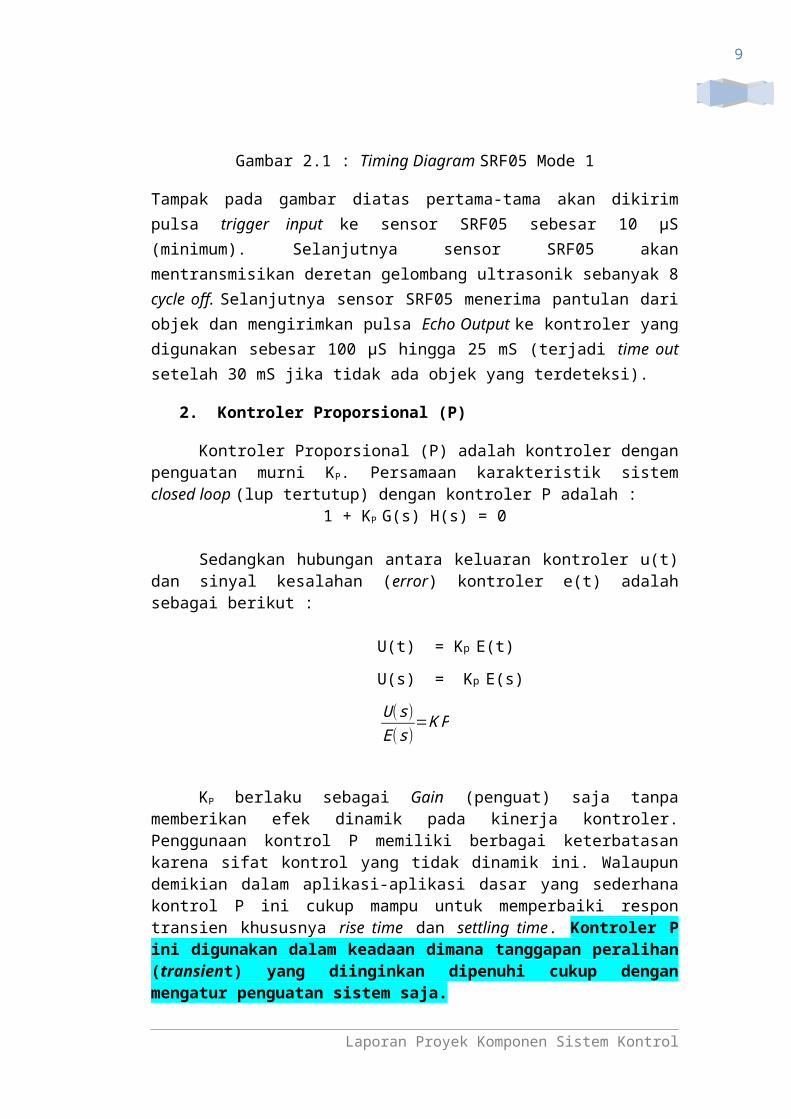
Gambar 2.1 : Timing Diagram SRF05 Mode 1
Laporan Proyek Komponen Sistem Kontrol
9
Tampak pada gambar diatas pertama-tama akan dikirim pulsa trigger input ke sensor SRF05 sebesar 10 µS (minimum). Selanjutnya sensor SRF05 akan mentransmisikan deretan gelombang ultrasonik sebanyak 8 cycle off. Selanjutnya sensor SRF05 menerima pantulan dari objek dan mengirimkan pulsa Echo Output ke kontroler yang digunakan sebesar 100 µS hingga 25 mS (terjadi time out setelah 30 mS jika tidak ada objek yang terdeteksi).
2. Kontroler Proporsional (P)
Kontroler Proporsional (P) adalah kontroler dengan penguatan murni KP. Persamaan karakteristik sistem closed loop (lup tertutup) dengan kontroler P adalah :
1 + KP G(s) H(s) = 0
Sedangkan hubungan antara keluaran kontroler u(t) dan sinyal kesalahan (error) kontroler e(t) adalah sebagai berikut :
U(t) = Kp E(t)
U(s) = Kp E(s)
U (s)E(s)
=K P
KP berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik pada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time. Kontroler P ini digunakan dalam keadaan dimana tanggapan peralihan (transient) yang diinginkan dipenuhi cukup dengan mengatur penguatan sistem saja.
sumber (dengan perubahan) : http://id.wikipedia.org/wiki/PID
Laporan Proyek Komponen Sistem Kontrol
9
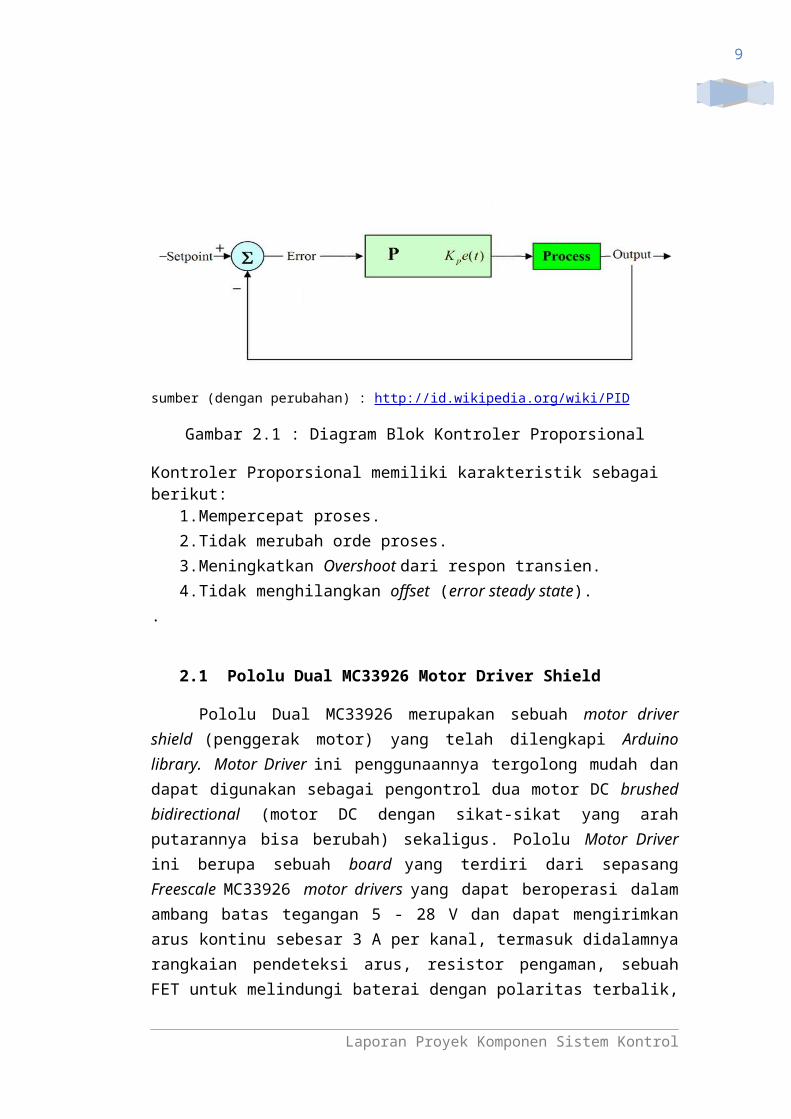
Gambar 2.1 : Diagram Blok Kontroler Proporsional
Kontroler Proporsional memiliki karakteristik sebagai berikut: 1. Mempercepat proses.2. Tidak merubah orde proses. 3. Meningkatkan Overshoot dari respon transien.4. Tidak menghilangkan offset (error steady state).
.
2.1 Pololu Dual MC33926 Motor Driver Shield
Pololu Dual MC33926 merupakan sebuah motor driver shield (penggerak motor) yang telah dilengkapi Arduino library. Motor Driver ini penggunaannya tergolong mudah dan dapat digunakan sebagai pengontrol dua motor DC brushed bidirectional (motor DC dengan sikat-sikat yang arah putarannya bisa berubah) sekaligus. Pololu Motor Driver ini berupa sebuah board yang terdiri dari sepasang Freescale MC33926 motor drivers yang dapat beroperasi dalam ambang batas tegangan 5 - 28 V dan dapat mengirimkan arus kontinu sebesar 3 A per kanal, termasuk didalamnya rangkaian pendeteksi arus, resistor pengaman, sebuah FET untuk melindungi baterai dengan polaritas terbalik, serta gerbang logika (logic gate) untuk mengurangi jumlah pin I/O (input/output) yang dibutuhkan.
Berikut beberapa fitur yang disediakan oleh Pololu Dual MC33926 Motor Driver :
1. Rentang tegangan operasi yang besar: 5 – 28 V.2. Arus output : 3 A (kontinu) (besar arus puncak5 A) per motor. 3. Input sesuai dengan sistem 5 V maupun 3,3 V.4. Operasi PWM hingga 20 kHz, bersifat ultrasonik sehingga dapat
menghasilkan kerja motor yang lebih halus. 5. Tegangan output dari rangkaian pendeteksi arus sebanding dengan arus
motor (kira-kira 525 mV/A) 6. Motor Indicator LEDs (LED indikator untuk motor) menunjukkan apa
yang tengah dikerjakan oleh output walaupun tidak ada motor yang terhubung.
2.2 Pulse Width Modulation (PWM)
Untuk mengatur kecepatan motor DC salah satunya dapat digunakan teknik PWM (Pulse Width Modulation). Dengan menggunakan PWM kita dapat mengatur kecepatan motor DC yang diinginkan dengan mudah. Teknik PWM untuk pengaturan kecepatan motor DC dilakukan dengan cara mengubah-ubah
Laporan Proyek Komponen Sistem Kontrol
9
besarnya duty cycle pulsa. Duty cycle adalah perbandingan perioda logic high pada pulsa berbanding dengan perioda satu gelombang penuh pulsa, atau dirumuskan melalui persamaan berikut :
Duty=T ON
T
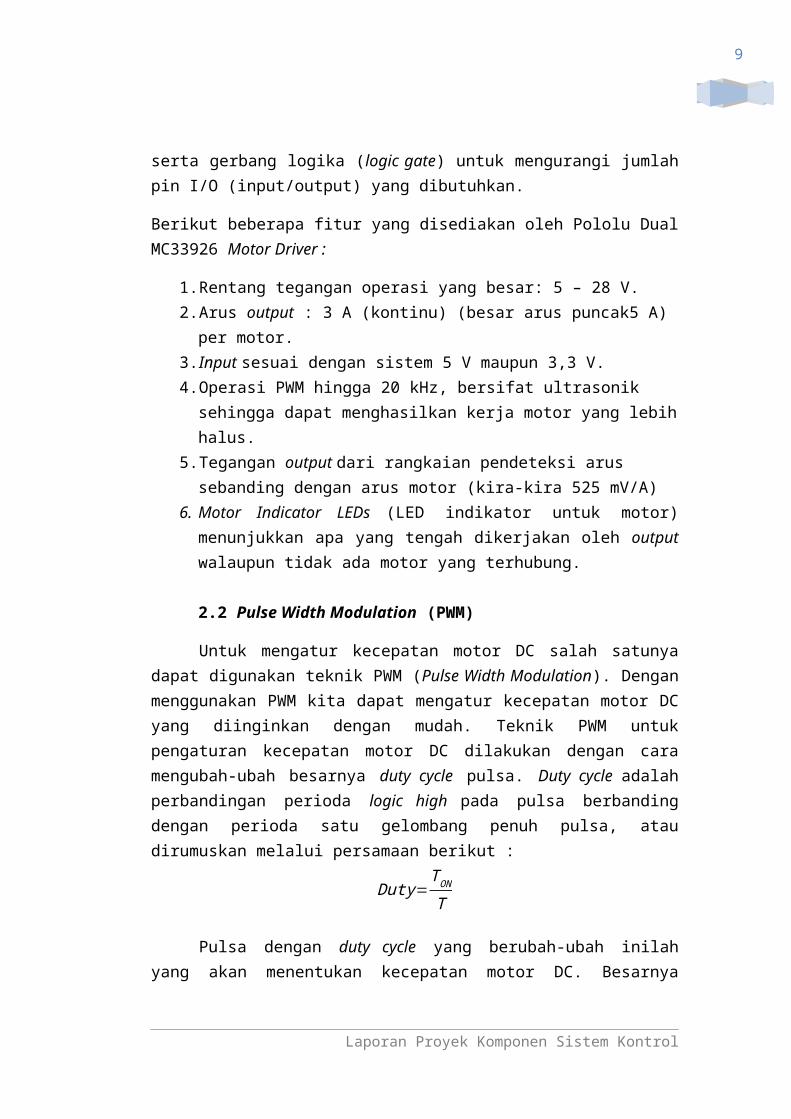
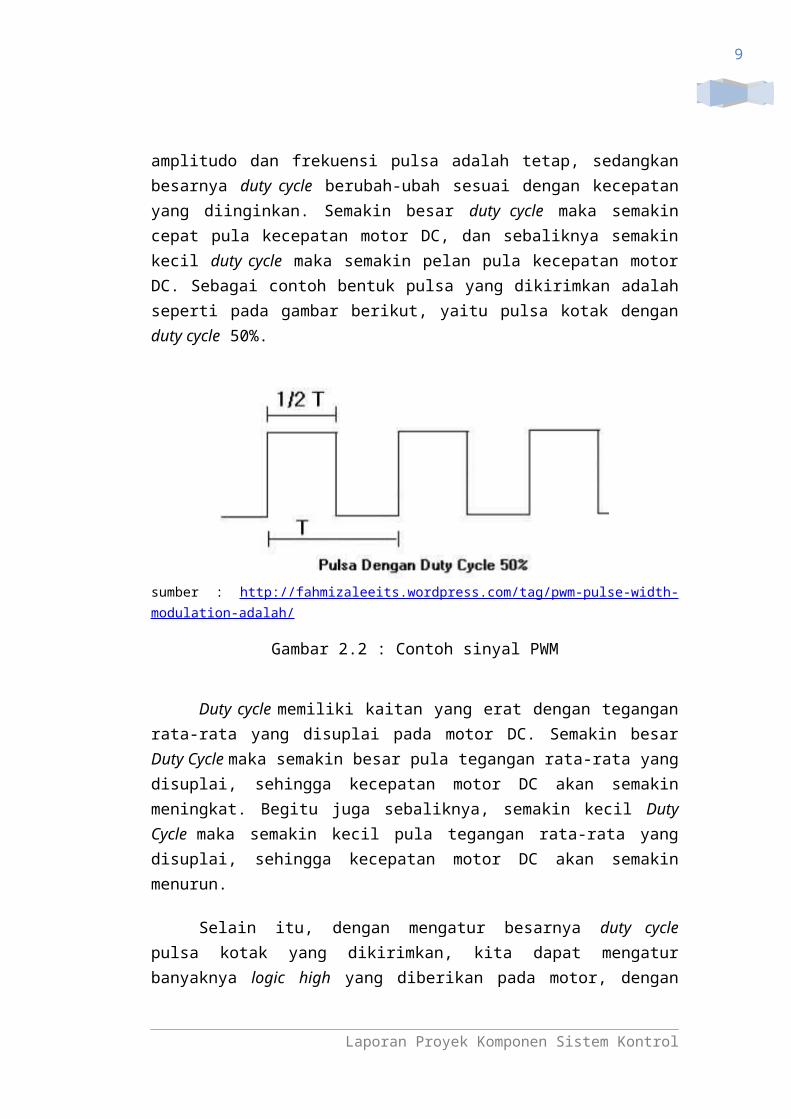
Pulsa dengan duty cycle yang berubah-ubah inilah yang akan menentukan kecepatan motor DC. Besarnya amplitudo dan frekuensi pulsa adalah tetap, sedangkan besarnya duty cycle berubah-ubah sesuai dengan kecepatan yang diinginkan. Semakin besar duty cycle maka semakin cepat pula kecepatan motor DC, dan sebaliknya semakin kecil duty cycle maka semakin pelan pula kecepatan motor DC. Sebagai contoh bentuk pulsa yang dikirimkan adalah seperti pada gambar berikut, yaitu pulsa kotak dengan duty cycle 50%.
sumber : http://fahmizaleeits.wordpress.com/tag/pwm-pulse-width-modulation-adalah/
Gambar 2.2 : Contoh sinyal PWM
Duty cycle memiliki kaitan yang erat dengan tegangan rata-rata yang disuplai pada motor DC. Semakin besar Duty Cycle maka semakin besar pula tegangan rata-rata yang disuplai, sehingga kecepatan motor DC akan semakin meningkat. Begitu juga sebaliknya, semakin kecil Duty Cycle maka semakin kecil pula tegangan rata-rata yang disuplai, sehingga kecepatan motor DC akan semakin menurun.
Selain itu, dengan mengatur besarnya duty cycle pulsa kotak yang dikirimkan, kita dapat mengatur banyaknya logic high yang diberikan pada motor, dengan kata lain mengatur lamanya waktu motor untuk berputar dalam satu periode pulsa. Jika lamanya waktu motor untuk berputar dalam satu periode pulsa ini berubah maka kecepatan putaran motor juga akan berubah, sesuai dengan duty cycle atau waktu motor untuk berputar dalam satu periode pulsa.
Laporan Proyek Komponen Sistem Kontrol
9
III. Tujuan Proyek
Pada proyek ini didesain simulasi sistem pengontrol jarak sederhana yang terdiri dari ban berjalan (conveyor) sebagai plant, sensor jarak ultrasonik dan kontroler Proporsional (P) dimana pada sistem yang dibuat sensor akan diletakkan diatas conveyer, kemudian conveyer akan bergerak maju atau mundur sesuai jarak set point yang telah ditentukan sebelumnya, dihitung dari dinding yang ada di depan sensor. Tujuannya adalah mensimulasikan suatu sistem pengontrol jarak sederhana yang sering ditemukan dalam kehidupan sehari-hari.
IV. Perancangan dan Realisasi
Berikut ini diagram blok dari sistem yang akan direalisasikan:
Seperti yang telah dijelaskan sebelumnya, untuk perancangan digunakan sensor jarak ultrasonik SRF05 dengan ketentuan pin sebagai berikut :
sumber : http://www.robot-electronics.co.uk/htm/srf05tech.htm
Laporan Proyek Komponen Sistem Kontrol
∑Kontroler P
(Motor Driver Pololu MC3926)
Aktuator(Motor DC)
ErrorPlant
(SistemConveyer)
Sensor(SRF05)
OutputSet Point
9
Gambar 4.1 : Konfigurasi pin SRF05 menggunakan Mode 1
Ketentuan pin diatas digunakan untuk penggunaan SRF05 dengan mode 1. Kelima pin di sebelah kanan tidak digunakan.
Kemudian digunakan kontroler Pololu Dual MC33926 Motor Driver Shield dengan ketentuan pin sebagai berikut :
sumber : http://www.pololu.com/product/2503
Gambar 4.2 : Konfigurasi pin Pololu menggunakan mikrokontroler
Pada sistem yang dirancang hanya digunakan satu motor, sehingga terlihat pada gambar diatas pin-pin M2A, M2B, M2DIR dan M2PWM tidak digunakan. Yang digunakan hanya pin M1PWM, M1DIR, pin GND di sebelah kiri (untuk mikrokontroler dan gerbang logika) dan pin GND di sebelah kanan (untuk motor DC) serta pin VDD (untuk mikrokontroler dan gerbang logika) dan VIN (untuk motor).
Berikut gambar sistem (mencakup plant) yang telah berhasil direalisasikan :
Laporan Proyek Komponen Sistem Kontrol

9
sumber : dokumentasi pribadi
Gambar 4.3 : Gambar sistem lengkap dengan plant, sensor dan kontroler
Sistem ini bekerja melalui langkah-langkah sebagai berikut :1. Input Set Point (SP) telah ditentukan terlebih dahulu, misal 10 cm dari
tembok.2. Nilai KP telah ditentukan di dalam pemrograman yang ada di dalam
mikrokontroler. 3. Kemudian sensor akan bekerja membaca jarak ke tembok. Algoritma di
dalam pemrograman akan terus-menerus membandingkan hasil pembacaan sensor dengan nila Set Point yang telah ditentukan. Selisihnya yang berupa sinyal error akan digunakan sebagai sinyal kontrol. Algoritma pemrograman akan terus bekerja secara kontinu hingga sinyal error bernilai 0.
4. Algoritma pemrograman juga akan membandingkan apakah nilai pembacaan sensor lebih besar atau lebih kecil dari nilai SP. Jika lebih besar berarti jarak sensor terlalu besar, sehingga sensor perlu maju menuju tembok. Untuk maju maka motor driver perlu diberi logic high (1).
5. Sebaliknya, jika pembacaan sensor lebih kecil maka sensor perlu mundur menjauhi tembok untuk mencapai SP. Untuk mundur maka motor driver perlu diberi logic low (0).
Laporan Proyek Komponen Sistem Kontrol

9
6. Selanjutnya sinyal error yang merupakan selisih nilai SP dan pembacaan sensor digunakan untuk menentukan besar Gain (penguatan) dari kontroler Proporsional dengan persamaan :
P=error∗K P
Dengan P merupakan nilai Gain, dan nilai KP telah ditentukan sebelumnya. Sinyal error tidak bernilai minus karena hanya berupa selisih.
7. Nilai Gain P akan menentukan Duty Cycle dari sinyal PWM yang ada dalam motor driver melalui persamaan :
Duty Cycle=P(%)
Saat Duty Cycle maksimal (100 %) maka kecepatan motor akan maksimal untuk bergerak mengejar SP, sedangkan saat Duty Cycle minimal (0 %) maka motor akan berhenti. Sehingga semakin besar sinyal error maka pergerakan conveyor akan semakin cepat, sedangkan saat sinyal error mendekati nol maka motor akan melambat hingga akhirnya berhenti.
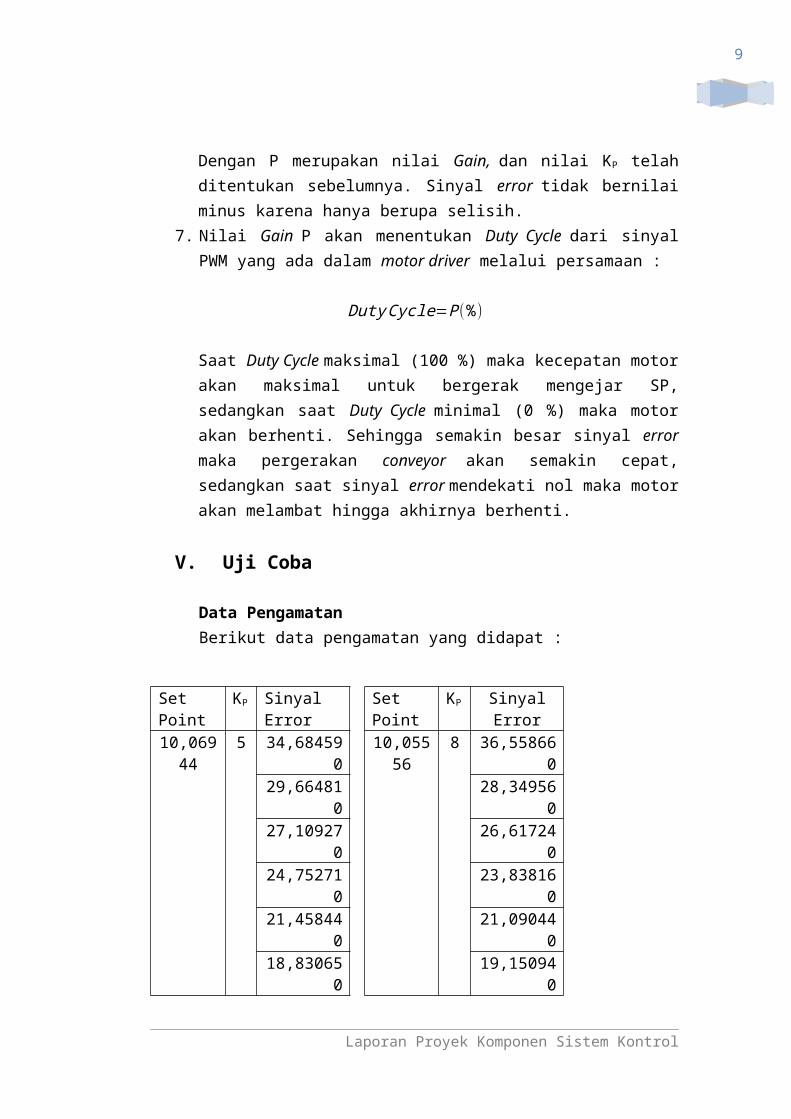
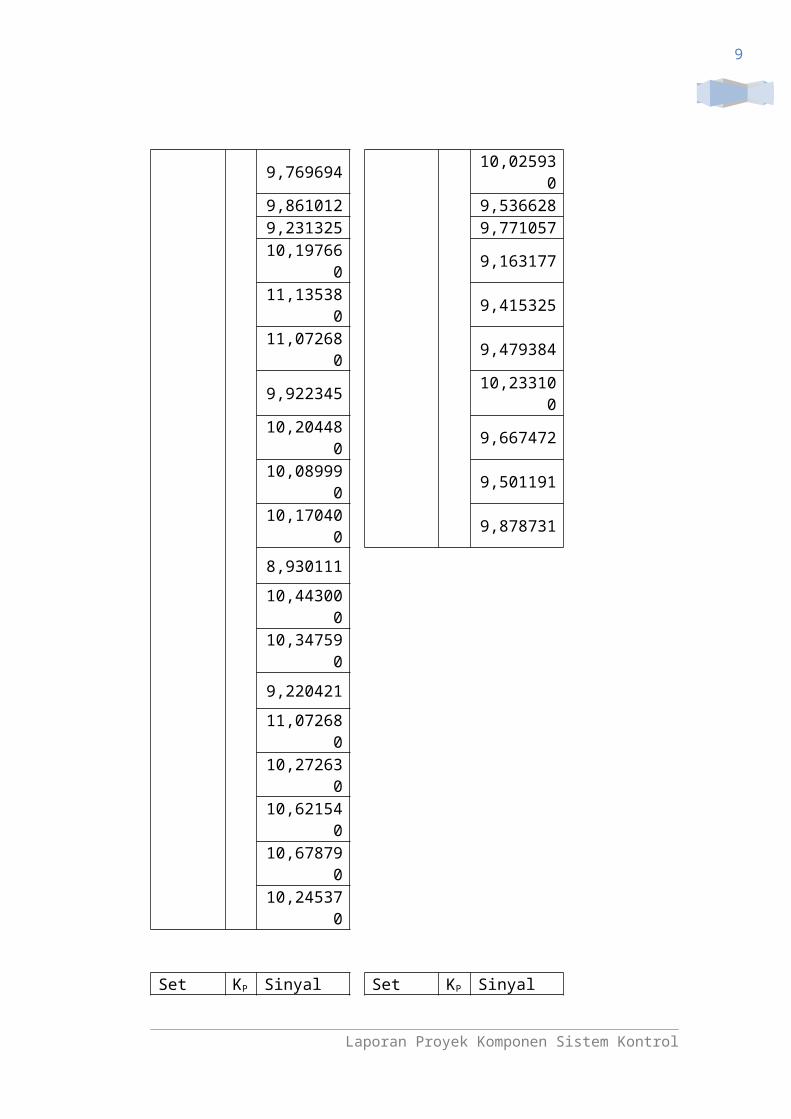
V. Uji Coba Data PengamatanBerikut data pengamatan yang didapat :
Set Point KP Sinyal Error
Set Point KP Sinyal Error
10,06944 5
34,684590
10,05556 8
36,55866029,664810 28,34956027,109270 26,61724024,752710 23,83816021,458440 21,09044018,830650 19,15094015,607250 15,18337013,295670 12,67280010,800090 11,49520011,484300 10,00957011,777330 9,69064210,907770 10,34077011,602870 9,90053810,617450 10,113160
Laporan Proyek Komponen Sistem Kontrol

9
11,072680 10,66107011,169450 9,84329410,879140 9,41396212,063550 9,79831611,673750 9,95641911,514280 10,03683010,671970 10,02729010,902310 10,08863011,730990 9,50664310,816450 10,14587010,741480 9,9237089,769694 10,0259309,861012 9,5366289,231325 9,771057
10,197660 9,16317711,135380 9,41532511,072680 9,4793849,922345 10,233100
10,204480 9,66747210,089990 9,50119110,170400 9,878731
8,930111
10,443000
10,347590
9,220421
11,072680
10,272630
10,621540
10,678790
10,245370
Set Point KP Sinyal Error
Set Point KP
Sinyal Error
10,05556 1033,25349
10,05556 1532,967270
29,92105 28,566270
Laporan Proyek Komponen Sistem Kontrol

9
27,7703 25,56640024,01671 23,88995022,50519 20,62703019,51077 17,79616015,69312 15,70402013,05852 11,62059010,46617 10,02729011,2267 9,23814010,51387 8,97372610,31897 6,87476810,70741 9,13046610,03956 11,26622010,08999 9,91825710,60383 9,61704310,77011 9,4057849,769694 9,43304310,29034 10,50706010,43891 13,86811010,49615 10,75375010,71968 10,49070010,63245 10,46617010,24946 10,48116010,70605 10,6310809,861012 9,75742710,65562 10,49615010,74557 9,76015310,33123 10,63245010,34214 10,59292010,94729 9,81058310,5016 9,94142710,91867 10,6038309,775146 10,67334010,46208 10,82599010,98137 9,375799
9,25040610,85052010,14178011,16264010,55885010,66243011,3929809,862375
Laporan Proyek Komponen Sistem Kontrol
9
10,50706010,72377010,49615010,92412010,4879709,976864
10,38848011,10539010,449810
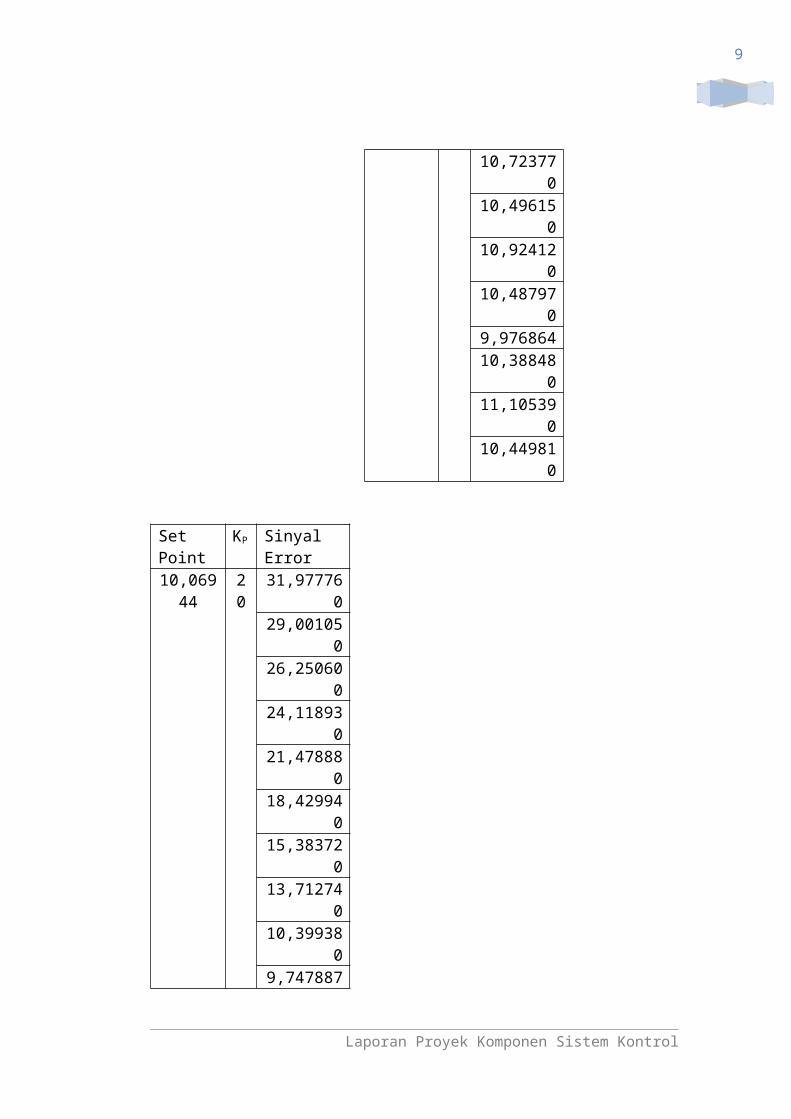
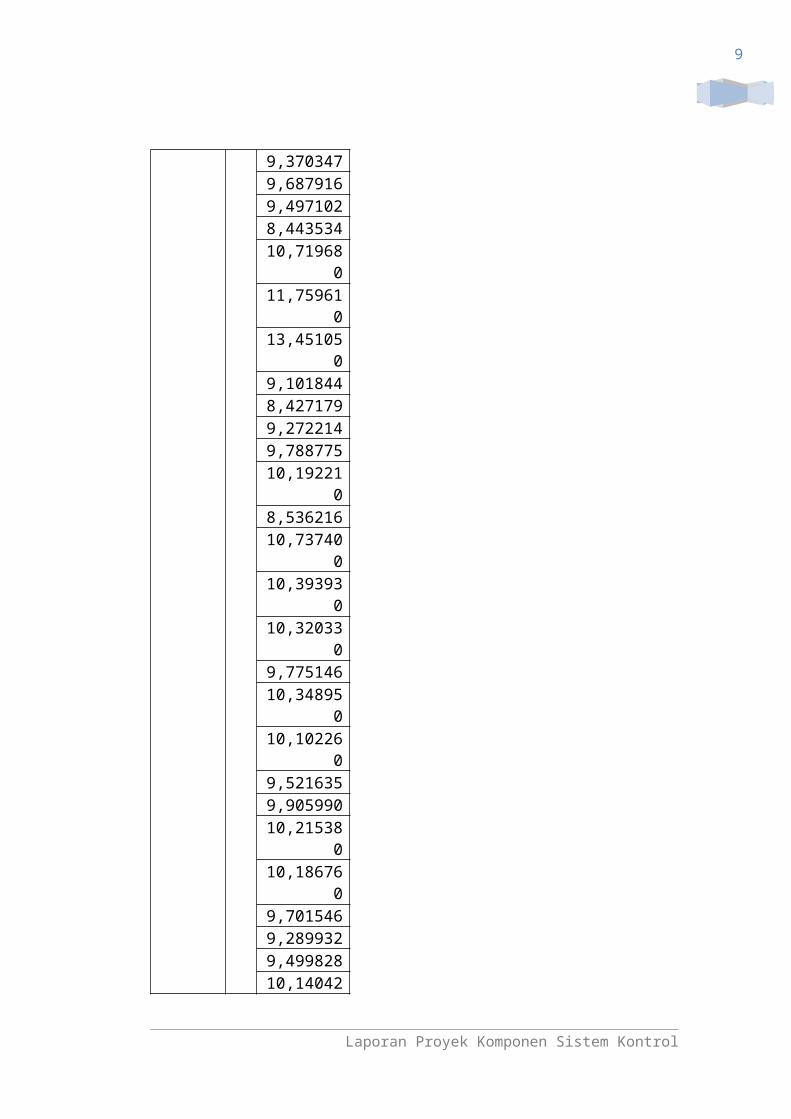
Set Point KP Sinyal Error
10,06944
20
31,97776029,00105026,25060024,11893021,47888018,42994015,38372013,71274010,3993809,7478879,3703479,6879169,4971028,443534
10,71968011,75961013,4510509,1018448,4271799,2722149,788775
10,1922108,536216
10,73740010,39393010,3203309,775146
10,34895010,1022609,521635
Laporan Proyek Komponen Sistem Kontrol

9
9,90599010,21538010,1867609,7015469,2899329,499828
10,1404209,870553
10,23310010,1526909,540717
10,32442010,8150809,443947
10,5711108,8674158,905578
10,62700011,5142809,1400077,982854
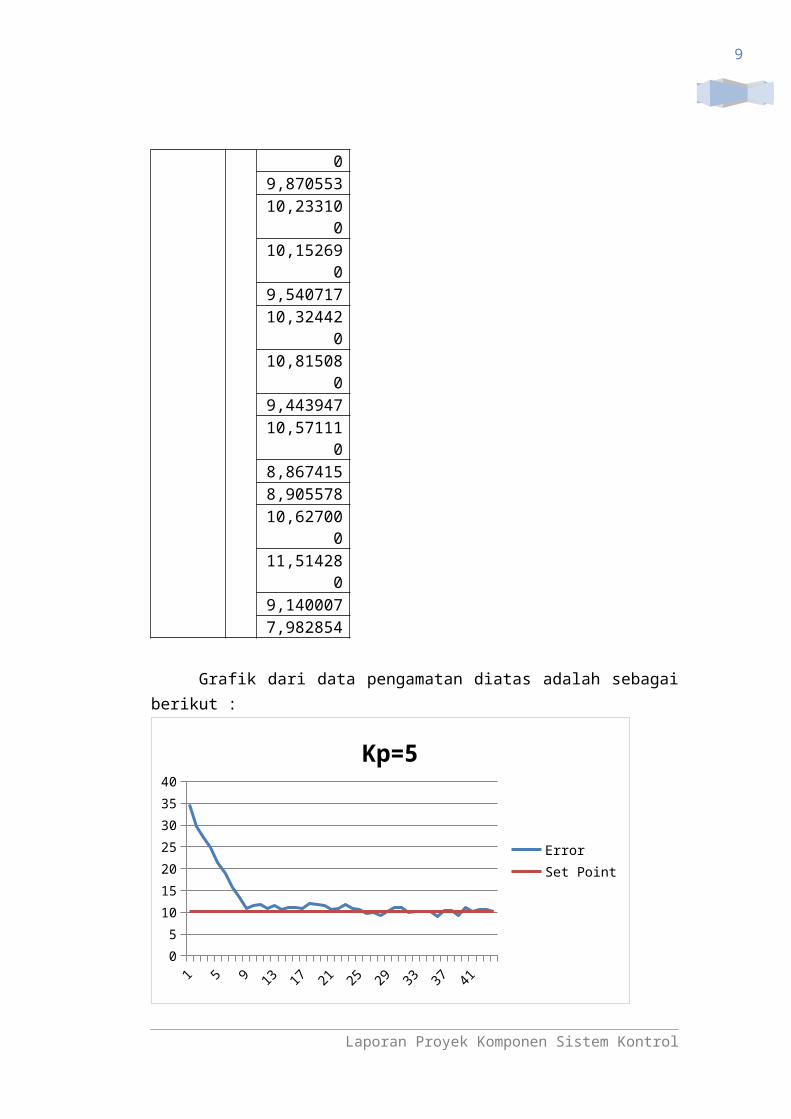
Grafik dari data pengamatan diatas adalah sebagai berikut :
1 4 7 10 13 16 19 22 25 28 31 34 37 40 430
5
10
15
20
25
30
35
40
Kp=5
ErrorSet Point
Laporan Proyek Komponen Sistem Kontrol
9
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43-20
0
20
40
60
80
100
120
140Kp=5
ErrorSinyal Kontrol
Pada Kontroler P dengan nilai KP = 5 terlihat osilasi sistem cukup kecil, namun respon transien dari sistem tidak dapat mencapai set point, dan error steady state sistem masihlah cukup besar.
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
5
10
15
20
25
30
35
40Kp=8
ErrorSet Point
Laporan Proyek Komponen Sistem Kontrol

9
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35-50
0
50
100
150
200
250Kp=8
ErrorSinyal Kontrol
Pada Kontroler P dengan nilai KP = 8 terlihat osilasi sistem semakin menurun, dan sistem berosilasi dibawah nilai set point. Selain itu respon transien sistem terlihat cukup bagus, ditandai dengan tercapainya set point dan osilasi serta error steady state yang sangat kecil. KP = 8 dianggap merupakan nilai KP yang sesuai untuk sistem ini.
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 350
5
10
15
20
25
30
35
Kp=10
ErrorSet Point
Laporan Proyek Komponen Sistem Kontrol

9
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35-50
0
50
100
150
200
250Kp=10
ErrorSinyal Kontrol
Pada Kontroler P dengan nilai KP = 10 terlihat osilasi sistem hampir sama besarnya dengan saat KP = 8, namun sistem cenderung berosilasi di atas nilai set point. Selain itu respon transien sistem terlihat cukup bagus, ditandai dengan tercapainya set point dan osilasi serta error steady state yang sangat kecil. KP = 10 juga dianggap merupakan nilai KP yang sesuai untuk sistem ini.
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 520
5
10
15
20
25
30
35Kp=15
Error
Set Point
Laporan Proyek Komponen Sistem Kontrol
9
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52
-100
-50
0
50
100
150
200
250
300
350
400Kp=15
ErrorSinyal Kontrol
Pada Kontroler P dengan nilai KP = 15 terlihat osilasi sistem cenderung naik dan nilai osilasi puncaknya cukup besar, sehingga KP = 15 tidak sesuai dengan sistem ini, walaupun dengan KP tersebut sistem dapat mencapai set point.
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 490
5
10
15
20
25
30
35Kp=20
Error
Set Point
Laporan Proyek Komponen Sistem Kontrol
9
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49-100
0
100
200
300
400
500Kp=20
ErrorSinyal Kontrol
Pada Kontroler P dengan nilai KP = 20 terlihat osilasi sistem bertambah sehingga membuat sistem cenderung tidak stabil sehingga KP = 20 tidak sesuai dengan sistem ini, walaupun dengan KP tersebut sistem dapat mencapai set point.
VI. Kesimpulan
Menurut hasil uji coba yang telah dilakukan maka dapat disimpulkan bahwa proyek berhasil direalisasikan dan dapat bekerja sesuai dengan tujuan yang telah disebutkan sebelumnya.
Namun pada saat uji coba didapat beberapa kesimpulan lain, diantaranya penggunaan kontroler Proporsional menyebabkan respon transien sistem masih memiliki error steady state, sehingga masih ada sistem yang tidak mencapai set point pada respon transiennya.
Selain itu sistem terus berosilasi di sekitar set point akibat kurangnya faktor redaman, serta settling time dengan nilai KP yang terlalu besar cukup lama sehingga sistem sulit untuk stabil.
Namun yang lebih utama didapat nilai KP yang sesuai untuk sistem, yaitu diantara KP = 8 dan KP = 10. Respon transien dengan KP tersebut dinilai cukup bagus, dan terbukti bahwa sistem dapat mencapai set point dan memiliki respon transien yang cukup bagus hanya dengan menggunakan kontroler Proporsional
VII. Daftar Pustaka
Laporan Proyek Komponen Sistem Kontrol
9
Spesifikasi Pololu Dual MC33926 Motor Driver Shield
http://www.pololu.com/product/2503
Artikel Wikipedia mengenai PID
http://id.wikipedia.org/wiki/PID
Artikel lain mengenai PID
http://digilib.itb.ac.id/files/disk1/548/jbptitbpp-gdl-suryadinim-27355-3-2007ta-2.pdf
http://directory.umm.ac.id/Data%20Elmu/pdf/Desain_Kontroller_PID.pdf
Spesifikasi Ultra Sonic Ranger - SRF05
http://www.robot-electronics.co.uk/htm/srf05tech.htm
Artikel mengenai SRF05
http://belajar-dasar-pemrograman.blogspot.com/2013/04/sensor-jarak-ultrasonik-srf05.html
Artikel mengenai PWM
http://fahmizaleeits.wordpress.com/tag/pwm-pulse-width-modulation-adalah/
VIII. Glosarium
Conveyor : Ban berjalan, digunakan pada industri atau sistem transportasi untuk memindahkan suatu barang dalam sebuah proses. Tipe yang paling sederhana dapat terdiri dari satu buah motor untuk menggerakkan gear (geligi) yang dililit oleh karet ban.
Respon Transien : respon sistem yang berlangsung dari keadaan awal kemudian input sistem berubah secara tiba-tiba.
Error Steady State : Selisih nilai akhir output dengan set point saat sistem tidak dapat mencapai set point.
Settling Time : Ukuran waktu yang menyatakan respon telah masuk 5% atau 2% atau 0,5% dari respon steady state
Laporan Proyek Komponen Sistem Kontrol
Related Documents











