SISTEM PENGENDALI ROBOT MOBIL BERBASIS MIKROKONTROLER ATMEGA16 DENGAN ANTAR MUKA RJ45 Randy Rahman Fauzi Simon Siregar , Ssi., MT Dudi Soegiarto. ST., MT. Email : [email protected] Program Studi Teknik Komputer Politeknik Telkom Bandung 2011 ABSTRAK Perkembangan teknologi robot semakin berkembang terutama pada peran robot yang dapat menggantikan pekerjaan manusia contohnya pada lingkungan yang berbahaya ataupun sistem keamanan. Sistem pengendali diimplementasikan untuk memberikan alternatif lain bagi manusia dalam menggerakan atau menjalankan alat yang dapat dikendalikan dari titik pusat. Pada proyek akhir ini bertujuan untuk membuat sebuah alat berupa robot mobil yang dikendalikan melalui laptop atau komputer menggunakan jaringan Ethernet. Robot mobil ini dilengkapi dengan kamera webcam untuk memantau keadaan sekitar yang kemudian gambar hasil capture tersebut ditampilkan di monitor disisi pengendali. Pada robot mobil ini menggunakan mikrokontroler ATmega16 yang mempunyai kelebihan dari segi kecepatan dan proses eksekusi dan robot mobil dapat bergerak sesuai dengam perintah dari sistem kendali seperti maju, mundur, belok kiri, belok kanan. Robot mobil dapat dikendalikan dan berkomunikasi melalui jaringan ethernet, robot mobil ini dapat dikendalikan sesuai dengan perintah dari sistem kendali seperti bergerak ke arah kanan, kiri, maju dan mundur Kunci : Sistem Pengendali, Robot Mobil, Ethernet, dan ATmega16 1. BAB I PENDAHULUAN 1.1. Latar Belakang Perkembangan teknologi dibidang robotika telah menjadi perhatian yang cukup serius dalam beberapa tahun terakhir. Perkembangan teknologi robot terutama pada peran robot yang dapat menggantikan pekerjaan manusia terutama dalam lingkungan yang berbahaya, seperti daerah radiasi nuklir, penjelajahan ruang angkasa, perang, penjinak bom dan lain-lain. Dan juga penggunaan jaringan internet sebagai media penyaluran sinyal kontrol dan pengendali telah berkembang pesat. Diantaranya adalah untuk pengaturan peralatan di rumah tangga seperti pintu rumah, kontrol robot, dan mesin produksi di industri. Proyek Akhir ini mencoba untuk membuat robot mobil yang dapat bergerak menuju lokasi atau daerah yang telah ditetapkan atau menuju sasaran

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

SISTEM PENGENDALI ROBOT MOBIL BERBASIS MIKROKONTROLER ATMEGA16
DENGAN ANTAR MUKA RJ45
Randy Rahman Fauzi Simon Siregar , Ssi., MT Dudi Soegiarto. ST., MT. Email : [email protected]
Program Studi Teknik Komputer
Politeknik Telkom Bandung
2011
ABSTRAK
Perkembangan teknologi robot semakin berkembang terutama pada peran robot yang dapat
menggantikan pekerjaan manusia contohnya pada lingkungan yang berbahaya ataupun sistem keamanan. Sistem
pengendali diimplementasikan untuk memberikan alternatif lain bagi manusia dalam menggerakan atau
menjalankan alat yang dapat dikendalikan dari titik pusat.
Pada proyek akhir ini bertujuan untuk membuat sebuah alat berupa robot mobil yang dikendalikan melalui
laptop atau komputer menggunakan jaringan Ethernet. Robot mobil ini dilengkapi dengan kamera webcam untuk
memantau keadaan sekitar yang kemudian gambar hasil capture tersebut ditampilkan di monitor disisi
pengendali. Pada robot mobil ini menggunakan mikrokontroler ATmega16 yang mempunyai kelebihan dari segi
kecepatan dan proses eksekusi dan robot mobil dapat bergerak sesuai dengam perintah dari sistem kendali
seperti maju, mundur, belok kiri, belok kanan.
Robot mobil dapat dikendalikan dan berkomunikasi melalui jaringan ethernet, robot mobil ini dapat
dikendalikan sesuai dengan perintah dari sistem kendali seperti bergerak ke arah kanan, kiri, maju dan mundur
Kunci : Sistem Pengendali, Robot Mobil, Ethernet, dan ATmega16
1. BAB I PENDAHULUAN
1.1. Latar Belakang
Perkembangan teknologi dibidang robotika
telah menjadi perhatian yang cukup serius dalam
beberapa tahun terakhir. Perkembangan teknologi
robot terutama pada peran robot yang dapat
menggantikan pekerjaan manusia terutama dalam
lingkungan yang berbahaya, seperti daerah radiasi
nuklir, penjelajahan ruang angkasa, perang, penjinak
bom dan lain-lain. Dan juga penggunaan jaringan
internet sebagai media penyaluran sinyal kontrol dan
pengendali telah berkembang pesat. Diantaranya
adalah untuk pengaturan peralatan di rumah tangga
seperti pintu rumah, kontrol robot, dan mesin
produksi di industri.
Proyek Akhir ini mencoba untuk membuat
robot mobil yang dapat bergerak menuju lokasi atau
daerah yang telah ditetapkan atau menuju sasaran
tertentu. Robot mobil ini dilengkapi dengan kamera
webcam wireless sehingga diharapkan umpan
baliknya lebih nyata dan bisa memantau atau melihat
keadaan yang berada disekitar robot mobil.
Ada banyak metode yang dapat digunakan
untuk membuat sebuah trayektori bagi robot mobil
salah satunya dengan mengggunakan metode berbasis
jaringan ethernet. Pada jaringan ethernet ini robot
mobil dapat dikendalikan atau dikontrol dalam suatu
jaringan TCP/IP sehingga robot dapat bergerak sesuai
dengan perintah yang diberikan oleh pusat
pengendali atau pusat kontrol seperti belok kanan,
belok kiri, maju atau pun mundur dan dapat
mengirimkan umpan balik berupa video dikarenakan
robot mobil telah dilengkapi webcam.
Dipilihnya Mikrokontroler ATmega16 sebagai
basis dari pengendali sistem komunikasi antar ruang
adalah karena fasilitas-fasilitas dasar yang
dimilikinya untuk mendukung sistem pengendalian
secara serial yang terprogram sehingga terwujud
sistem komunikasi yang murah, teratur dan efisien
tetapi tetap efektif terhadap tujuan dibuatnya alat ini .
1.2. Perumusan Masalah
Bagaimana membuat suatu alat berupa robot
mobil menggunakan mikrokontroler ATmega16
yang berbasis ethernet ?
1.3. Tujuan
Tujuan dari pembuatan proyek ini adalah
membuat suatu alat berupa robot mobil yang
dikendalikan dan dikontrol melalui jaringan ethernet
dan robot mobil dapat bergerak sesuai dengan
perintah dari sistem kendali seperti maju, mundur,
belok kiri, belok kanan.
1.4. Batasan Masalah
Adapun batasan masalah pembuatan proyek ini
adalah :
1. Mikrokontroler yang digunakan adalah jenis
mikrokontroler AVR ATmega16.
2. Pengiriman data melalui jaringan ethernet
dengan media EMS Ethernet Module.
3. Alat pemantau pada robot mobil memakai
webcam wireless.
4. Alat yang dibuat masih dalam bentuk prototype.
5. Kamera webcam tidak bisa diarahkan secara
dinamis.
6. Tidak membahas keamanan jaringan.
7. Sistem pengiriman data dari sistem pengontrol
ke robot mobil menggunakan wireline.
8. Memakai software Arduino untuk memprogram
mikrokontroler.
9. Library Ethernet yang digunakan langsung dari
Arduino.
2. BAB II LANDASAN TEORI
2.1. Perangkat Keras
2.1.1. Mikrokontroler
Mikrokontroler adalah sebuah chip yang berfungsi
sebagai pengontrol rangkaian elektronik dan umunya
dapat menyimpan program didalamnya.
Mikrokontroler umumnya terdiri dari CPU (Central
Processing Unit), memori, I/O tertentu dan unit
pendukung seperti Analog-to-Digital Converter
(ADC) yang sudah terintegrasi di dalamnya.
Kelebihan utama dari mikrokontroler ialah
tersedianya RAM dan peralatan I/O pendukung
sehingga ukuran board mikrokontroler menjadi
sangat ringkas. Mikrokontroler ATmega16 ialah
mikrokomputer CMOS 8 bit dengan 16 KB Flash
PEROM (Programmable and Erasable Only

Memory) yang dapat dihapus dan ditulisi sebanyak
1000 kali.
Mikrokontroler ini diproduksi dengan
menggunakan teknologi high density non-volatile
memory Atmel. Flash PEROM on-chip tersebut
memungkinkan memori program untuk diprogram
ulang dalam sistem (in-system programming) atau
dengan menggunakan programmer non-volatile
memori konvensional.
2.1.1.1. Mikrokontroler AVR ATMega16
AVR merupakan seri mikrokontroler CMOS 8-bit
buatan Atmel, berbasis arsitektur RISC (Reduced
Instruction Set Computer). Hampir semua instruksi
dieksekusi dalam satu siklus clock. AVR mempunyai
32 register general-purpose, timer/counter fleksibel
dengan mode compare, interrupt internal dan
eksternal, serial UART, programmable Watchdog
Timer, dan mode power saving, ADC dan PWM
internal. AVR juga mempunyai In-System
Programmable Flash on-chip yang mengijinkan
memori program untuk diprogram ulang dalam
sistem menggunakan hubungan serial SPI.
ATMega16. ATMega16 mempunyai throughput
mendekati 1 MIPS per MHz membuat disainer sistem
untuk mengoptimasi konsumsi daya versus kecepatan
proses. Sehingga dengan fasilitas yang lengkap ini,
programmer dan desainer dapat menggunakannya
untuk berbagai aplikasi sistem elektronika seperti
robot, otomasi industry, peralatan telekomunikasi,
dan berbagai keperluan lain.
AVR memiliki keunggulan dibandingkan dengan
mikrokontroler lain, keunggulan mikrokontroler
AVR yaitu AVR mrmiliki kecepatan eksekusi
program yang lebih cepat karena sebagian besar
instruksi dieksekusi dalam satu siklus clock, lebih
cepat dibandingkan dengan mikrokontroler MCS51
yang memiliki arsitektur CISC (Complex Instruction
Set Compute) dimana mikrokontroler MCS51
membutuhkan 12 siklus clock utnuk mengeksekusi 1
instruksi.
Adapun fitur yang dimiliki Mikrokontroler AVR
ATmega16 adalah sebagai berikut :
1) Frekuensi clock maksimum 16 MHz.
2) Jalur I/O 32 buah, yang terbagi dalam port
A, port B, port C, dan port D.
3) Analog to Digital Converter (ADC) 10 bit
sebanyak 8 input.
4) Timer/counter sebanyak 3 buah.
5) CPU 8 bit yang terdiri dari 32 register.
6) Watchdog timer dengan osilator internal.
7) SRAM internal sebesar 1K byte.
8) Memori flash sebesar 16K byte dengan
kemampuan read while write.
9) Interrupt internal maupun eksternal.
10) Port komunikasi SPI (Serial Pheripheral
Interface)
11) EEPROM (Electrically Erasable Program-
mable Read Only Memory) sebesar 512 byte
yang dapat diprogram saat operasi.
12) Analog komparator.
13) Komunikasi serial standar USART dengan
kecepaatan maksimal 2,5 Mbps
2.1.1.2. Fungsi PIN Mikrokontroler AVR
ATmega16
Pin-pin pada ATMega16 dengan kemasan
40-pin DIP (dual inline package) Guna
memaksimalkan performa, AVR menggunakan
arsitektur Harvard (dengan memori dan bus
terpisah untuk program dan data). untuk jelasnya
dapat dilihat pada gambar dibawah ini :
ATMega16 mempunyai empat buah port
yang bernama PortA, PortB, PortC, dan PortD.
Keempat port tersebut merupakan jalur

bidirectional dengan pilihan internal pull-up. Tiap
port mempunyai tiga buah register bit, yaitu
DDxn, PORTxn, dan PINxn. Huruf „x‟mewakili
nama huruf dari port sedangkan huruf „n‟
mewakili nomor bit. Bit DDxn terdapat pada I/O
address DDRx, bit PORTxn terdapat pada I/O
address PORTx, dan bit PINxn terdapat pada I/O
address PINx.
Mikrokontroler ATmega16 dikemas
dalam bentuk DIP 40 pin, 32 kaki diantaranya
adalah kaki untuk keperluan port paralel. Satu
port paralel terdiri dari 8 kaki, dengan demikian
32 kaki tersebut membentuk 4 buah port paralel,
yang masing-masing dikenal sebagai Port A, Port
B, Port C, dan Port D. Nomor dari masing-
masing jalur(kaki) dari Port paralel mulai dari 0
sampai 7, jalur (kaki) pertama Port A disebut
sebagai PA.0 dan jalur terakhir untuk Port D
adalah PD.7. untuk jelasnya dapat dilihat pada
gambar dibawah ini :
2.1.2. Webcam
Webcam (web camera) adalah sebutan
bagi kamera real-time (bermakna keadaan pada
saat ini juga) yang gambarnya bisa diakses atau
dilihat melalui World Wide Web, program instant
messaging, atau aplikasi video call yang
dihubungkan ke komputer melalui port USB
ataupun port COM.
Defenisi yang lain tentang WebCam
adalah sebuah pheripheral berupa kamera sebagai
pengambil citra/gambar dan mikropon (optional)
serbagai pengambil suara atau audio yang
dikendalikan oleh sebuah komputer atau oleh
jaringan komputer. Gambar yang diambil oleh
webcam ditampilkan ke layar monitor, karena
dikendalikan oleh komputer maka ada interface
atau port yang digunakan untuk menghubungkan
webcam dengan komputer atau jaringan
Sebuah webcam yang sederhana terdiri
dari sebuah lensa standar, dipasang di sebuah
papan sirkuit untuk menangkap sinyal gambar,
casing (cover), termasuk casing depan dan casing
samping untuk menutupi lensa standar dan
memiliki sebuah lubang lensa di casing depan
yang berguna untuk memasukkan gambar, kabel
support, yang dibuat dari bahan yang fleksibel,
salah satu ujungnya dihubungkan dengan papan
sirkuit dan ujung satu lagi memiliki connector.
2.1.3. Motor DC
Motor adalah motor arus searah, motor dc
telah memunculkan kembali Silicon Controller
Rectifier yang digunakan untuk memfasilitasi
control kecepatan pada motor. Mesin listrik dapat
berfungsi sebagai motor listrik apabila didalam
motor listrik tersebut terjadi proses konversi dari
energi listrik menjadi energi mekanik.
Gambar 2.2 Webcam

Sedangkan untuk motor dc itu sendiri
memerlukan suplai tegangan yang searah pada
kumparan jangkar dan kumparan medan untuk
diubah menjadi energi mekanik. Pada motor dc
kumparan medan disebut stator (bagian yang tidak
berputar) dan kumparan jangkar disebut rotor
(bagian yang berputar). Jika tejadi putaran pada
kumparan jangkar dalam pada medan magnet,
maka akan timbul tagangan (GGL) yang berubah-
ubah arah pada setiap setengah putaran, sehingga
merupakan tegangan bolak-balik. Prinsip dari arus
searah adalah membalik phasa negatif dari
gelombang sinusoidal menjadi gelombang yang
mempunyai nilai positif dengan menggunakan
komutator, dengan demikian arus yang bebalik
arah dengan kumparan jangkar yang berputar
dalam medan magnet, dihasilkan tegangan (GGL)
Dalam membuat mobil robot ini penulis
menggunakan jenis motor DC brush . Motor DC
brush adalah motor DC sikat, motor DC ini
seperti motor DC yang digunakan pada mainan
anak-anak yaitu tamiya, pemutar tape yang
menggunakan motor DC dll. Sikat ini terdapat
didalam motor DC itu sendiri yang berfungsi
untuk memutar bagian rotor. Tipe motor DC
brush ini yaitu tipe FA-130 Motor.
Spesifikasi FA-130 Motor
1. RPM: 6990-9100 (6990 Max Efisiensi.)
2. Voltage: 1.5-3V (1.5V Recommended)
(4.5 V max)
3. Ampere: 0,66 A
2.1.4. EMS Ethernet Module
EMS Ethernet Module merupakan modul
antarmuka komunikasi ethernet dengan
mikrokontroler/mikroprosesor melalui antarmuka
SPI berbasis IC ENC28J60. Modul ini bekerja
pada level tegangan TTL 5V. IC ENC28J60 pada
modul ini telah terintegrasi dengan MAC dan 10
Base-T PHY yang dilengkapi dengan kemampuan
deteksi dan koreksi polaritas secara otomatis.
Modul ini cocok diaplikasikan untuk embedded
web server, embedded DHCP server serta aplikasi
lain yang berbasis komunikasi ethernet.
Spesifikasi EMS Ethernet Module
1) Berbasis IC ENC28J60.
a. Kompatibel dengan IEEE 802.3
Ethernet controller.
b. Mendukung mode full duplex dan
half duplex.
c. Pengiriman ulang secara otomatis
(dapat diprogram).
d. Penolakan paket yang salah secara
otomatis (dapat diprogram).
2) SPI dengan frekuensi clock hingga 20
MHz dan level TTL 5V.
3) Kecepatan transfer data ethernet hingga
10 Mbps.
Gambar 2.3 Motor DC
Gambar 2.4 EMS Ethernet Module

4) Buffer data sebesar 8 kBytes untuk
paket data yang dikirim maupun
diterima (shared buffer).
5) Mendukung paket data Unicast,
Multicast maupun Broadcast.
6) Alamat MAC dapat diprogram.
Tersedia jumper untuk pemilihan mode operasi (full
atau half duplex
2.2. Perangkat lunak
2.2.1. Arduino
Arduino IDE adalah sebuah aplikasi cross-
platform yang ditulis dalam java, dan berasal dalam
bahasa pemrograman Pengolahan. Hal ini dirancang
agar lebih mudah digunakan dan terbiasa dengan
pengembangan perangkat lunak. Ini termasuk kode
editor dengan fitur seperti sintaks , brace matching ,
dan indentasi otomatis, arduino mampu menyusun
dan meng-upload program hanya dengan satu klik.
Arduino IDE dapat menggunkan library C / C
+ + atau biasa disebut "wiring" dan membuat
banyak operasi input / output jauh lebih mudah.
Program Arduino ditulis dalam bahasa C / C + +,
meskipun pengguna hanya perlu mendefinisikan dua
fungsi untuk membuat sebuah program runnable:
setup () - fungsi berjalan sekali pada awal
program yang dapat menginisialisasi
pengaturan loop() –fungsi yang digunakan
berulang kali
2.2.2. Hercules Setup Utilitas
Hercules SETUP utilitas digunakan sebagai
serial port terminal (RS-485 atau RS-232
terminal), UDP / IP dan TCP terminal / terminal
Klien IP Server. Aplikasi ini diciptakan untuk
penggunaan internal kelompok saja, tapi saat ini
meliputi banyak fungsi dalam satu utilitas yang
sifatnya gratis atau freeware.
Bagian yang umum digunakan pada Hercules setup
utility sebagai berikut:
Serial port terminal
TCP/IP Client terminal (mirip dengan
"Telnet")
TCP/IP Server "terminal"
UDP "terminal"
2.3. Teori Pendukung
2.3.1. Bahasa C
Bahasa C merupakan general-purpose
language, yaitu bahasa pemrograman yang dapat
digunakan untuk tujuan apa saja. C merupakan
industrial-strenght language. Dengan bahasa C,
kita dapat membangun beragam aplikasi, mulai
dari pemrograman sistem, aplikasi cerdas (artificial
intelligence), sistem pakar, utility, driver, database,
browser, network programming, sistem operasi,
game, virus, dan lainnya.
2.3.2. Arsitektur Dasar TCP/IP
2.3.2.1. Pengenalan
Pada dasarnya komunikasi data merupakan
proses mengirimkan data dari satu komputer ke
komputer yang lain. Untuk dapat mengirimkan
data, pada computer harus ditambah suatu alat
yang disebut sebagai antarmuka jaringan (network
interface). Jenis antarmuka jaringan ini
bermacam-macam tergantung pada media fisik
yang digunakan untuk mengirimkan data tersebut.
TCP/IP adalah sekumpulan protokol yang
dirancang untuk melakukan fungsi-fungsi
komunikasi data pada WAN, terdiri atas
sekumpulan protokol yang masing-masing
bertanggung-jawab atas bagian-bagian tertentu

komunikasi data. TCP/IP bukan hanya protokol
yang dijalankan oleh internet, tetapi juga protokol
yang digunakan pada jaringan intranet. TCP
menyediakan kehandalan transmisi data antara
client dan server apabila data hilang atau diacak,
TCP memicu transmisi ulang sampai galat
terkoreksi. IP menjalankan paket data dari simpul
ke simpul, mengdekode alamat dan rute data ke
tujuan yang ditunjuk. Lapisan pada TCP/IP
diperlihatkan pada Gambar 2.11.
TCP/IP terdiri atas empat lapis kumpulan
protokol yang bertingkat. Keempat lapisan
tersebut adalah sebagai berikut.
1. Lapisan Antarmuka Jaringan (Network
Interface Layer). Lapisan ini sering disebut
juga link layer paling bawah yang
bertanggung jawab mengirim dan menerima
data ke dan dari media fisik. Media fisiknya
dapat berupa kabel, serat optik, atau
gelombang radio. Protokol pada lapisan ini
harus mampu menjadi data digital yang
dimengerti komputer yang berasal dari
peralatan lain yang sejenis.
2. Lapisan Internet (Internet Layer). Protokol
yang berada pada lapisan inibertanggung
jawab dalam pengiriman paket ke alamat
yang tepat. Pada lapisan ini terdapat tiga
macam protokol yaitu IP (Internet Protocol),
ARP (Address Revolution Protocol), dan
ICMP (Internet Control Message Protocol).
3. Lapisan Transport (Transport Layer).
Lapisan ini berisi protokol yang
bertanggung jawab untuk mengadakan
komunikasi antara dua host. Kedua protokol
yang terdapat pada lapisan ini adalah TCP
(Transmission Control Protocol) dan UDP
(User Diagram Protocol).
4. Lapisan Aplikasi (Application Layer).
Pada lapisan ini pengguna memakai semua
aplikasi yang disediakan oleh layanan
TCP/IP. Program aplikasi akan memilih
jenis protokol tranportasi yang diperlukan.
2.3.2.2. Transmission Control Protocol (TCP)
TCP merupakan protokol lapisan
transport, menyediakan layanan yang dikenal
sebagai connection oriented, reliable, dan byte
stream service. Connection oriented berarti bahwa
sebelum melakukan pertukaran data dua aplikasi
pengguna TCP harus melakukan pembentukan
hubungan (handshake) terlebih dahulu. Reliable
berarti TCP menerapkan proses deteksi kesalahan
paket dan mentransmisi. Byte stream service
berarti paket dikirimkan dan sampai ke tujuan
secara berurutan.
2.3.2.3. User Datagram Protocol (UDP)
Tidak seperti TCP yang bersifat
connection oriented, UDP bersifat connectionless.
Dalam UDP tidak ada pengurutan kembali
(sequencing) paket yang datang, acknowledgment
terhadap paket yang datang atau retransmisi jika
paket mengalami masalah di tengah jalan.
Kemiripan UDP dengan TCP adalah pada
penggunaan port number. Karena sifatnya yang
connectionless dan unreliable, UDP digunakan
oleh aplikasi-aplikasi yang secara periodik
Gambar 2.5 Lapisan Pada TCP/IP

melakukan aktivitas tertentu. Pengiriman
datagram ke banyak client sekaligus akan lebih
efisien jika prosesnya menggunakan metode
connectionless
.
3. BAB III ANALISIS DAN PERANCANGAN
3.1. Perancangan Sistem
Perancangan suatu sistem yang akan dibuat
merupakan suatu tahapan yang sangat penting dalam
membuat suatu program ataupun melanjutkan ke
langkah selanjutnya, karena dengan perencanaan
tersebut diharapkan mendapatkan hasil yang baik
dan maksimal. dalam perancangan sistem yang
penulis buat adalah pengendalian suatu alat berupa
robot mobil yang dikendalikan melalui PC/laptop.
proses pengiriman data dari laptop ke
mikrokontroler ATmega16 melalui jaringan
ethernet, untuk pengiriman data dalam jaringan
ethernet sendri penulis memakai kabel LAN yang
terhubung dari laptop ke EMS Ethernet Modul.
berikut adalah gambar diagram blok perancangan
sistem :
Gambar 3.1 Diagram blok
Pada gambar di atas sistem pengendali dalam
hal ini berupa laptop akan mengirimkan suatu
perintah berupa data karakter, lalu data ini akan
diteruskan melalui jaringan ethernet dan diterima
oleh EMS Ethernet Modul lalu diteruskan ke
mikrokontroler ATmega16 untuk menterjemahkan
perintah yang telah dikirim, setelah data diolah
maka mikrokontroler akan menjalankan perintah
tersebut ke sistem penggerak dalam hal ini dinamo
motor untuk bergerak sesuai perintah.
Adapun skema anatomi pada robot mobil yang akan
penulis buat adalah seperti berikut :
Dan untuk desain arsitekturnya seperti gambar di
bawah ini :
Gambar 3.3 Desain Arsitektur
Untuk gambar blok diagram sistem sebagai
berikut :
Gambar 3.2 Blok Anatomi Robot
Sistem
pengendali
EMSEthernet
modulMikrokontroler
TX - RX
Sistem
Penggerak
Kontrol
GerakEthernet
RX - TX
L293D
L293D ATmega16
PD2
PD3
PD4
PD5
PD6
PD7
Enable(PWM)
Enable(PWM)
DIR 1A
DIR 2A
DIR 1A
DIR 2A
ENC28J60
VCC VCC
GND GND
PB4(SS)
PB5(Mosi)
PB6(Miso)
PB7(SCK)
CS
Mosi
Miso
SCK
VCC
GND
VCC
GND
GNDVCC
Baterai/Power
Supply
Baterai/Power
Supply
GND
VCC
Mikrokontroler EMS Ethernet
Modul
Driver Motor

Gambar 3.4 Blok Diagram Sistem
Keterangan :
1. Dir 1A : Input 1
2. Dir 2A : Input 2
3. Enable : PWM (Pulse-width modulation)
4. VCC : Tegangan positif (+5 V)
5. GND : Tegangan Negatif (Ground)
6. MISO : Serial data output
7. MOSI : Serial data input
8. SCK : Serial Clock
9. CS : Chip Select
3.2. Kebutuhan Perangkat Lunak
Dalam suatu perangkat keras ataupun hardware
tidak akan berguna jika tidak ada suatu program di
dalamnya, oleh karena itu sangatlah penting suatu
perangkat lunak atau software dalam sebuah
hardware sehingga hardware dapat terintegrasi
dalam sebuah komputer. Dan untuk memprogram
mikrokontroler sendiri penulis memakai Arduino
yang merupakan sebuah aplikasi yang digunkan
untuk membuat program yang ada pada komputer
atau laptop dan selanjutnya ditanamkan kedalam
mikrokontroler. Dan untuk bahasa programnya
penulis memakai bahasa C.
Tabel 3.1 Requairment Software
3.3. Kebutuhan Perangkat Keras
Ada beberapa aspek yang dapat dilihat pada
pengerjaan ini. Ada perangkat keras (hardware),
perangkat lunak (software), dan orang yang
menjalankan komputer (brainware). Hardware
disini dapat disebut dengan perangkat keras atau
peralatan apa saja yang menunjang. Software
merupakan seperangkat alat lunak yang digunakan
untuk mendesign suatu atau membuat suatu
program.
Dalam proyek akhir ini penulis memakai
beberapa hardware yang diperlukan yaitu :
Tabel 3.2 Spesifikasi Hardware
3.4. Deskripsi Sistem
Alat yang dibuat dalam proyek akhir ini adalah
berupa robot mobil yang dikontrol atau dikendalikan
dari laptop atau komputer sehingga robot mobil
dapat berjalan atau bergerak ke arah yang
diinginkan dari sisi kendali, seperti bergerak ke arah
kanan, kiri, maju dan mundur. Dalam pergerakannya
robot mobil ini dapat melihat keadaan sekitar karena
telah dilengkapi kamera video atau biasa disebut
No Alat/modul Nama
Alat/modul
Spesifikasi Jumlah
1 Mikrokontroler ATmega16 -IC
ATmega16
16 Hz
-downloader
-kristal
1
3 Ethernet
Module
EMS
Ethernet
Module
IC
ENC28j60
1
4 Driver motor Driver
motor
-IC L293D
-regulator
2
5 Motor DC Motor DC -Dinamo 3
6 USB-ISP
Downloader
KR-125 i -
6 Kamera video Webcam
Wireless
- 1
7 Baterai Baterai 1,2
Volt
- 4
8 Baterai Baterai 9
volt
- 1 Perangkat Spesifikasi Jumlah
Prosesor Intel Pentium 3 1
Motherboard Biostar 1
Memori RAM 256 Mb 1
Hardisk 40 Gb 1
LCD Intel HD graphics 1
webcam. Untuk video sendiri dapat ditampilkan di
layar laptop atau komputer yang mengendalikan
robot mobil ini.
Dan untuk komunikasi pengiriman data dari
laptop atau komputer menggunkan jaringan ethernet
dengan protokol TCP sehingga di dalam robot mobil
ini terdapat sebuah IP address. Karena robot mobil
ini masih berupa prototype maka untuk penghubung
antara laptop dan mikrokontroler menggunakan
kabel LAN dan tidak menggunakan wireless. Tetapi
untuk webcam sendiri menggunakan wireless yang
langsung terhubung dengan receiver di sisi
pengendali jadi tidak melalui mikrokontroler.
1. BAB IV IMPLEMENTASI DAN PENGUJIAN
4.1. Implementasi
Pada bab ini dilakukan pengimplementasian dan
pengujian perancangan alat yang penulis buat yaitu
sebuah robot mobil yang sebagian rangkanya berasal
dari mobil mainan bekas. Sebelum itu ada beberapa
hal atau langkah yang harus diperhatikan di antaranya
:
4.1.1. Hardware
Dibawah ini adalah hardware yang ada di
dalam mobil robot :
1. Sistem Minimun ATmega16
Sismin ATmega16 berfungsi sebagai
pengontrol dari rangkaian yang sudah terpasang di
badan robot, contohnya seperti mengontrol
pergerakan arah dari motor DC.
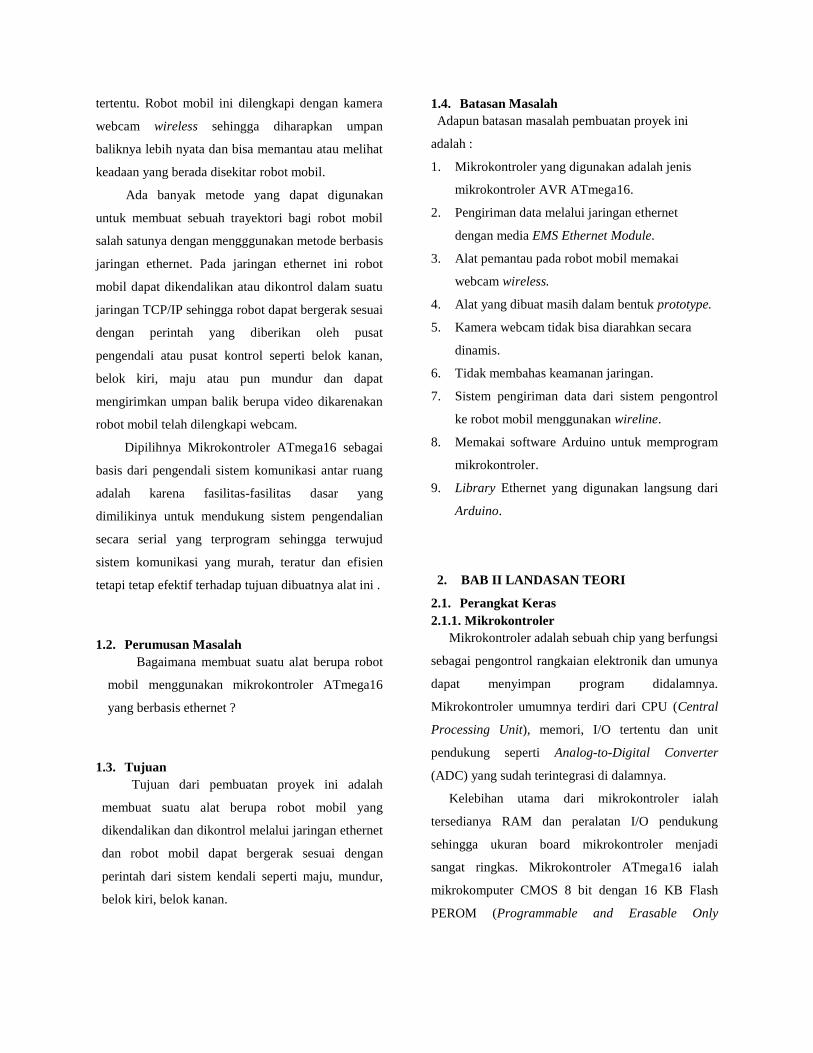
2. Driver Motor DC
Karena motor DC memerlukan arus yang besar
sedangkan mikrokontroler tidak bisa menyimpan
arus yang sangat besar maka diperlukan driver
motor DC yang tak lain berguna sebagai pengatur
arus atau penyeimbang arus yang dari motor DC ke
mikrokontroler. Driver motor disini memakai satu
buah IC L293D dan satu regulator.
3. DC motor
Untuk pergerakan robot mobil diperlukan
sebuah alat penggerak untuk menggerakan atau
memutar roda agar mobil dapat bergerak, oleh
karena itu diperlukan motor DC. Disini penulis
memakai tiga buah motor DC. Satu buah untuk roda
depan dan dua buah roda belakang.
4. EMS Ethernet Modul
Untuk komunikasi data yang berbasis IP
antara laptop dan mikrokontroler penulis
memakai modul ethernet. Modul ini dapat
berkomunikasi berbasis IP karena ada IC yang
mengaturnya yaitu ENC28J60. Dengan begitu
mikrokontroler memiliki IP dalam
berkomunikasi dengan laptop.
Gambar 4.1 Sismin ATmega16
Gambar 4.2 Driver Motor
Gambar 4.3 Motor DC
Gambar 4.4 EMS Ethernet Module

5. Baterai
Mikrokontroler ataupun hardware lainnya
tidak dapat berjalan jika tidak dialiri arus listrik,
oleh karena itu dipakailah baterai untuk
menghidupkan hardware-hardware tersebut
agar dapat berfungsi sebagaimana mestinya.
6. Roda
Roda berfungsi sebagai pergerakan
atau perpindahan mobil.
7. USB-ISP Downloader
Berfungsi untuk mengupload program yang
sudah jadi ke dalam sebuah mikrokontroler.
8. Kabel LAN
Kabel LAN berfungsi sebagai komunikasi data
antara laptop dan mikrokontroler. Kabel LAN yang
digunakan berjenis cross Over.
9. Kabel Serial
Kabel serial berfungsi untuk mengupload
program yang sudah dibuat di laptop ke dalam
mikrokontroler.
Dan setelah semua hardware sudah terkumpul
maka penulis mulai merangkai body dan seluruh
komponen hardware sehingga menjadi sebuah mobil
robot seperti pada gambar di bawah ini :
Gambar4.5 Baterai
Gambar 4.6 Roda
Gambar 4.8 Kabel LAN
Gambar 4.9 Kabel Serial
Gambar 4.10 Robot Tampak Samping
Gambar 4.7 USB-ISP Downloader
4.2. Pengujian Robot
Suatu sistem dikatakan berhasil ketika sistem
tersebut sudah dilakukan pengujian. Pengujian sistem
dalam proyek akhir ini berupa arah gerak dari robot
mobil tersebut yang dikendalikan dari laptop. Arah
gerak tersebut meliputi gerak ke kanan, kiri, lurus
ataupun mundur. Berikut beberapa pengujian yang
dilakukan agar robot mobil dapat bergerak sesuai
dengan perintah yang diberikan oleh pengendali
dalam hal ini laptop :
1. Robot bergerak maju jika di sisi pengendali
menekan tanda panah atas dan mengirimkan data
“cmd=1”. Lalu mikrokontroler akan
menginisialisasi karakter tersebut dan
menggerakan roda belakang untuk maju.
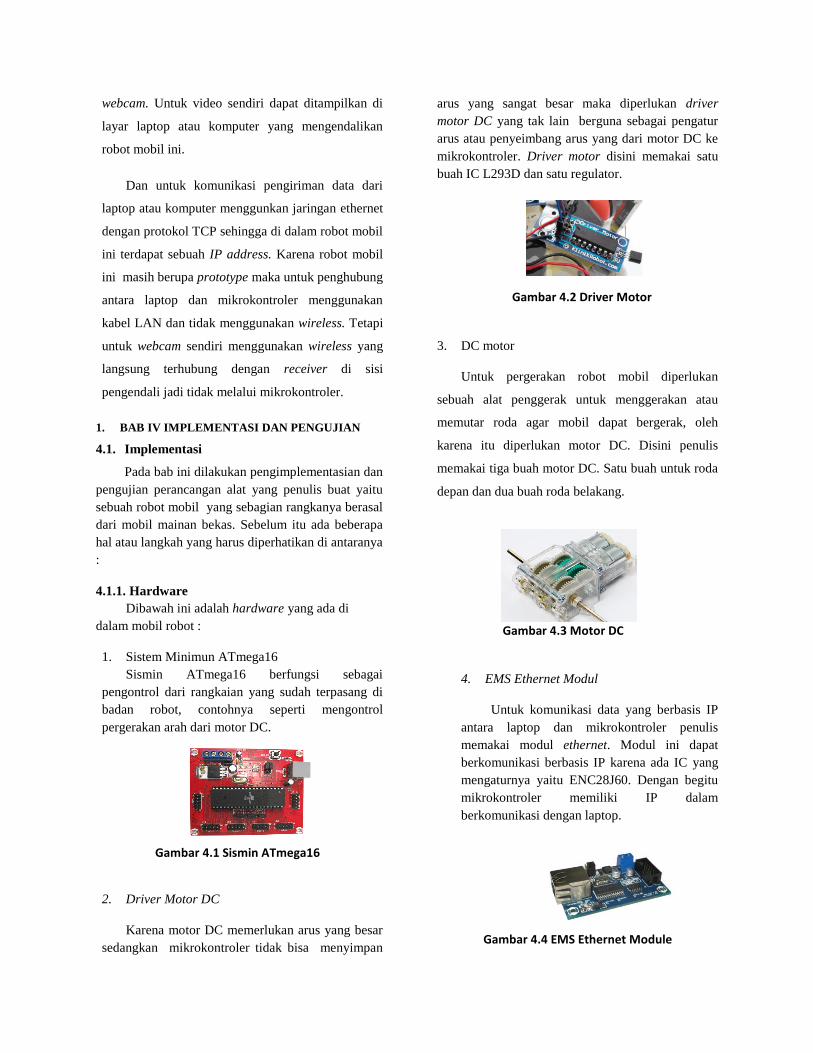
2. Robot bergerak mundur jika di sisi pengendali
menekan tanda panah bawah dan mengirimkan
data “cmd=2”. Lalu mikrokontroler akan
menginisialisas karakter tersebut dan
menggerakan roda belakang untuk mundur.
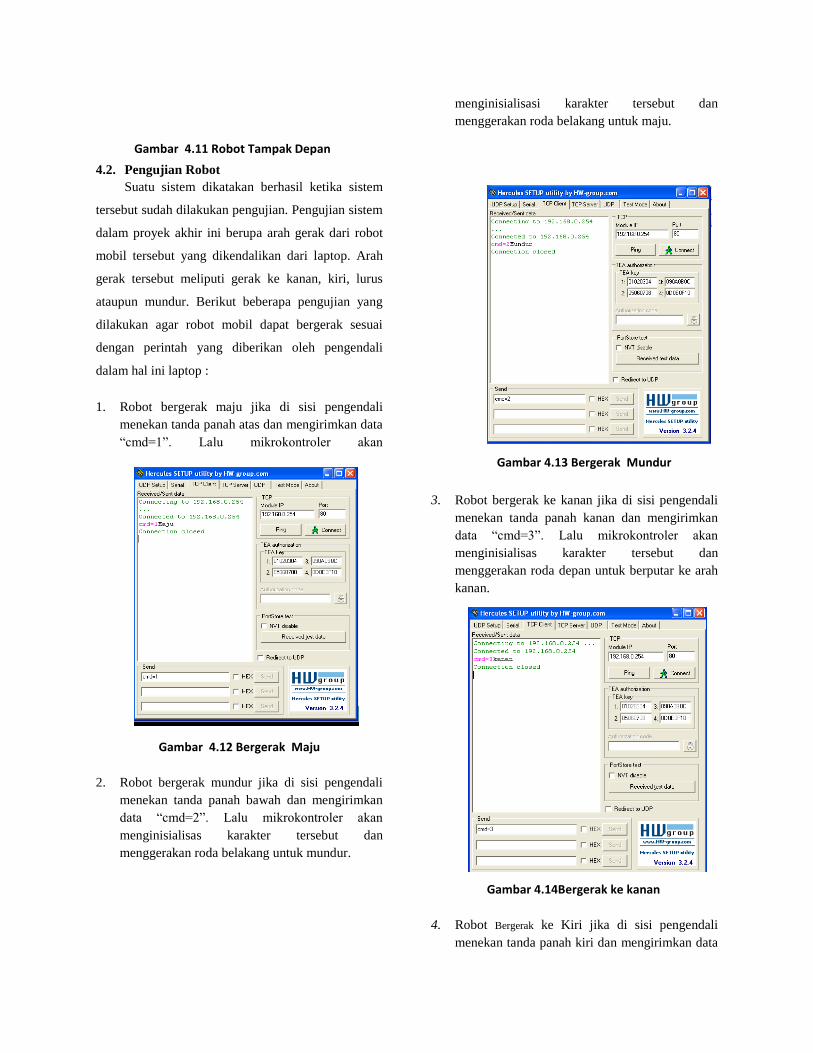
3. Robot bergerak ke kanan jika di sisi pengendali
menekan tanda panah kanan dan mengirimkan
data “cmd=3”. Lalu mikrokontroler akan
menginisialisas karakter tersebut dan
menggerakan roda depan untuk berputar ke arah
kanan.
4. Robot Bergerak ke Kiri jika di sisi pengendali
menekan tanda panah kiri dan mengirimkan data
Gambar 4.11 Robot Tampak Depan
Gambar 4.12 Bergerak Maju
Gambar 4.13 Bergerak Mundur
Gambar 4.14Bergerak ke kanan

“cmd=4”. Lalu mikrokontroler akan
menginisialisas karakter tersebut dan
menggerakan roda depan untuk berputar ke arah
kiri.
5. Roda belakang robot berhenti jika di sisi
pengendali menekan spasi dan mengirimkan data
“cmd=5”. Lalu mikrokontroler akan
menginisialisasi karakter tersebut dan roda
belakang akan berhenti.
6. Roda depan robot berhenti jika di sisi pengendali
menekan shift dan mengirimkan data “aep=6”.
Lalu mikrokontroler akan menginisialisasi
karakter tersebut dan roda depan akan berhenti.
Untuk pengujian koneksi apakah
mikrokontroler dengan laptop sudah terhubung maka
dilakukan ping IP, ketik ping 192.168.0.254, jika
muncul reply maka sudah dipastikan sudah terhubung
antara laptop dan mikrokontroler. seperti gambar
berikut :
5. BAB V PENUTUP
5.1. Kesimpulan
Adapun kesimpulan yang dapat diambil dalam
implementasi proyek akhir ini adalah :
Gambar 4.15 Bergerak ke kiri
Gambar 4.16Berhenti Belakang
Gambar 4.17 Berhenti Depan
Gambar 4.18 Pengujian Koneksi

1. Mikrokontroler dapat berkomunikasi melalui
jaringan TCP/IP
2. Robot mobil dapat dikendalikan melalui jaringan
TCP/IP
3. Robot mobil dapat bergerak sesuai perintah dari
aplikasi sistem kontrol
5.2. Saran
Beberapa saran yang dapat diberikan untuk
pengembangan alat ini agar kedepannya lebih baik
lagi adalah sebagai berikut :
1. Kedepan bisa menggunakan wifi (wireless
fidelity) untuk komunikasi datanya sehingga
jangkauan pengendaliannya lebih jauh lagi.
2. Penggunaan kamera (webcam) bisa
mengunakan kamera yang lebih kecil, dan
kamera itu bisa digerakaan dan bisa
dikendalikan sehingga bisa mengambil objek
tidak hanya fokus pada satu arah saja
3. Untuk perancangan alat ini tidak menutup
kemungkinan untuk dikembangkan lagi,
mengingat bahwa kemajuan teknologi semakin
canggih dan aplikasi pengendali sudah banyak
dipakai perusahaan maupun instansi lainnya.
DAFTAR PUSTAKA
Alfiyan, Rizki Matra. Web Server Berbasis
Embadded Ethernet Untuk Sistem Kendali Dan
Monitoring Jarak Jauh Pada Ruang Penyimpanan
Barang-Barang Berharga. Laporan Tugas Teknik
Elektro Akhir. Universitas Diponegoro
Andrianto, Heri. Pemrograman
MikrokontrolerAVR ATMEGA16 Menggunakan
Bahasa C. Bandung : Informatika.
Daryanto, Try. Program Sistem Pengendali
Mobil RC Berkamera Webcam Wireless Melalui Port
Paralel. Laporan Tugas Akhir Teknik Informatika
Fasilkom. Universitas Mercu Buana, 2010
Heryanto, M.Ari & Adi, Wisnu.
Pemrograman Bahasa C untuk Mikrokontroler
ATMEGA8535. Yogyakarta : Andi.
Joni, I made & Budi Raharjo. Pemrograman
C dan Implementasinya edisi kedua. Bandung :
Informatika
Rangkuti, Syahban. Mikrokontroler ATMEL
AVR. Bandung : Informatika
Wijaya, Taufik. Rancang Bangun
Aplikasi Pengendali Robot Berkamera Pada
Playstation Portable. Laporan Tugas Akhir Teknik
Telekomunikasi. Institute Teknologi Sepuluh
Nopember
Widodo, Romy Budhi. Embedded System
Menggunkan Mikrokontroler dan Pemrograman C.
Yogyakarta : Andi
Winoto, Ardi.(2010). mikrokontroler AVR
Atmega8/32/16/8535 dan programannya dengan
Bahasa C pada WinAVR edisi revisi.
Bandung:Informatika.
------, EMS Ethernet Module.
http://www.innovativeelectronics.com/innovative_ele
ctronics/download_files/manual/Manual%20EMS%2
0Ethernet%20Module.pdf
-------, ATmega16 Datasheet.
http://www.atmel.com/atmel/acrobat/doc2466.pdf
Related Documents

![[123doc.vn] Pengendali Motor Stepper Pada Pintu Bendungan Otomatis Berbasis Mikrokontroler At89s51](https://static.cupdf.com/doc/110x72/56d6bd501a28ab30168d7d65/123docvn-pengendali-motor-stepper-pada-pintu-bendungan-otomatis-berbasis.jpg)









