1 Prototip Helm Cerdas berbasis Arduino Nano Rachman Reza A., Prof. Dr. Ing. Soewarto Hardienata, Andi Chairunnas, S.Kom, M.Pd. Email : [email protected] Program Studi Ilmu Komputer FMIPA Universitas Pakuan ABSTRAK Angka kecelakaan yang cukup tinggi di Indonesia terutama didominasi oleh kendaraan roda dua sangatlah memprihatinkan. Banyak sekali pengendara yang mengkesampingkan aspek keselamatan dengan melanggar rambu lalu lintas ataupun mengendarai motor secara ugal ugalan. Tak sedikit pula yang mengendarai motor dengan kondisi mabuk ataupun mengantuk, selain membahayakan diri si pengendara, tindakan ini dapat membahayakan orang lain. Kurangnnya kewaspadaan pengendara menjadi tolak ukur jumlah kecelakaan yang terjadi. Hal ini bisa diminimalisir dengan membuat kondisi yang ideal dan nyaman untuk berkendara. Menggunakan Arduino Nano yang dihubungkan dengan sensor Giroskop, DHT-11 dan FR,04 yang akan membaca kondisi helm secara terus menerus. Sensor Giroskop akan membaca posisi kepala si pengendara dan menentukan bahwa posisi tersebut apakah ideal untuk berkendara, jika tidak ideal atau terlalu miring misalkan karena mengantuk, maka pengendara akan menerima suara peringatan berupa “beep” dari buzzer yang tertanam di dalam helm. Sensor FR-04 akan membaca tetesan air ketika hujan rintik- rintik ataupun hujan deras, sensor ini akan mengetahui intensitas air yang terdeteksi pada plat sensor lalu memberi perintah motor servo yang disatukan dengan kaca helm untuk otomatis menutup. Sensor DHT-11 akan membaca kelembaban dan suhu, ketika kondisi suhu dalam helm terlalu panas ataupun lembab dan membuat kaca helm mengembun, maka kipas mini yang tertanam dalam helm akan menyala untuk menyesuaikan suhu, ketika suhu terlalu panas makan kipas akan menurunkan suhu, ketika kaca helm mulai mengembun karena terlalu lembab, maka kipas akan menyesuaikan kelembaban hingga kaca tidak mengembun, karena embun di kaca helm dapat mengganggu pengelihatan pengendara. Dengan menciptakan kondisi ideal untuk berkendara, angka kecelakaan yang sering menimpa pengendara kendaraan roda dua bisa diminimalisir Kata Kunci : sensor Giroskop, DHT-11, FR-04, Motor Servo, Buzzer, prototip helm cerdas, Arduino Nano. 1. Pendahuluan Kecelakaan lalu lintas merupakan salah satu penyebab utama kematian terbesar yang dipengaruhi oleh beberapa faktor seperti jumlah pelanggaran rambu- rambu lalu lintas yang dilakukan oleh pengemudi, jumlah kendaraan, dan kondisi jalan (Muhammad Joni 2014). Kenyamanan berkendara dapat meningkatkan konsentrasi yang menciptakan keselamatan berkendara terutama untuk mengurangi angka kecelakaan yang terjadi karena Human Error. Persiapan pengendara untuk Safety Riding (Roda Dua) adalah menekankan terhadap persiapan fisik dan psikologis dari rider, karena dalam mengendarai sepeda motor membutuhkan keseimbangan, kenyamanan dan konsentrasi (Widi Admaja 2011). Banyak faktor yang harus diperhatikan untuk menciptakan kenyamanan saat berkendara. Selain kondisi kendaraan yang prima, kenyamanan pelindung kepala sangatlah penting karena selain melindungi kepala dari benturan, pelindung kepala berfungsi

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Prototip Helm Cerdas berbasis Arduino Nano Rachman Reza A., Prof. Dr. Ing. Soewarto Hardienata, Andi Chairunnas, S.Kom, M.Pd.
Email : [email protected]
Program Studi Ilmu Komputer FMIPA Universitas Pakuan
ABSTRAK
Angka kecelakaan yang cukup tinggi di Indonesia terutama didominasi oleh
kendaraan roda dua sangatlah memprihatinkan. Banyak sekali pengendara yang
mengkesampingkan aspek keselamatan dengan melanggar rambu lalu lintas ataupun
mengendarai motor secara ugal ugalan. Tak sedikit pula yang mengendarai motor dengan
kondisi mabuk ataupun mengantuk, selain membahayakan diri si pengendara, tindakan ini
dapat membahayakan orang lain. Kurangnnya kewaspadaan pengendara menjadi tolak
ukur jumlah kecelakaan yang terjadi. Hal ini bisa diminimalisir dengan membuat kondisi
yang ideal dan nyaman untuk berkendara. Menggunakan Arduino Nano yang dihubungkan
dengan sensor Giroskop, DHT-11 dan FR,04 yang akan membaca kondisi helm secara
terus menerus. Sensor Giroskop akan membaca posisi kepala si pengendara dan
menentukan bahwa posisi tersebut apakah ideal untuk berkendara, jika tidak ideal atau
terlalu miring misalkan karena mengantuk, maka pengendara akan menerima suara
peringatan berupa “beep” dari buzzer yang tertanam di dalam helm. Sensor FR-04 akan
membaca tetesan air ketika hujan rintik- rintik ataupun hujan deras, sensor ini akan
mengetahui intensitas air yang terdeteksi pada plat sensor lalu memberi perintah motor
servo yang disatukan dengan kaca helm untuk otomatis menutup. Sensor DHT-11 akan
membaca kelembaban dan suhu, ketika kondisi suhu dalam helm terlalu panas ataupun
lembab dan membuat kaca helm mengembun, maka kipas mini yang tertanam dalam helm
akan menyala untuk menyesuaikan suhu, ketika suhu terlalu panas makan kipas akan
menurunkan suhu, ketika kaca helm mulai mengembun karena terlalu lembab, maka kipas
akan menyesuaikan kelembaban hingga kaca tidak mengembun, karena embun di kaca
helm dapat mengganggu pengelihatan pengendara. Dengan menciptakan kondisi ideal
untuk berkendara, angka kecelakaan yang sering menimpa pengendara kendaraan roda dua
bisa diminimalisir
Kata Kunci : sensor Giroskop, DHT-11, FR-04, Motor Servo, Buzzer, prototip helm
cerdas, Arduino Nano.
1. Pendahuluan
Kecelakaan lalu lintas merupakan
salah satu penyebab utama kematian
terbesar yang dipengaruhi oleh beberapa
faktor seperti jumlah pelanggaran rambu-
rambu lalu lintas yang dilakukan oleh
pengemudi, jumlah kendaraan, dan kondisi
jalan (Muhammad Joni 2014). Kenyamanan berkendara dapat
meningkatkan konsentrasi yang
menciptakan keselamatan berkendara
terutama untuk mengurangi angka
kecelakaan yang terjadi karena Human
Error. Persiapan pengendara untuk Safety
Riding (Roda Dua) adalah menekankan
terhadap persiapan fisik dan psikologis
dari rider, karena dalam mengendarai
sepeda motor membutuhkan
keseimbangan, kenyamanan dan
konsentrasi (Widi Admaja 2011).
Banyak faktor yang harus diperhatikan untuk menciptakan
kenyamanan saat berkendara. Selain
kondisi kendaraan yang prima,
kenyamanan pelindung kepala sangatlah
penting karena selain melindungi kepala
dari benturan, pelindung kepala berfungsi
2
untuk menghalangi air, debu atau benda-
benda yang lainnya masuk ke area mata.
Pelindung kepala yang kurang baik malah
akan justru mengurangi konsentrasi
pengendara dan akan terasa tidak nyaman
digunakan.
Mengingat angka kecelakaan yang
kian meningkat tiap tahunnya, saya
memiliki gagasan untuk menciptakan
Helm Cerdas yang dapat meningkatkan
Kenyamanan dan akan meningkatkan
angka keselamatan berkendara. Pada
penelitian ini output dari sistem berupa
Buzzer, Motor Servo dan Blower yang
terpasang pada bagian depan Helm yang
dikendalikan berdasarkan inputan berupa
Sensor Sentuh , Sensor Deteksi Air FR-04,
Sensor Suhu dan Kelembaban Udara
DHT11 dan Sensor Gyroscope GY521 -
MPU-6050 3-Axis analog Gyro Sensor
with 3-Axis Accelerometer. Sensor Deteksi
Air akan mendeteksi adanya rintik hujan,
karena objek tersebut akan mengganggu
konsentrasi pengendara, maka Sistem akan
mengaktifkan Motor Servo untuk menutup
kaca Helm. Sensor Suhu dan Kelembaban
akan membaca suhu dan kelembaban
untuk mengaktifkan Blower ketika
keadaan Helm bagian dalam Lembab
(Berembun) atau dalam keadaan Panas.
Sensor Gyroscope akan membaca sudut
dan kemiringan posisi Helm dan
mengetahui jika pengendara tidak
konsentrasi ataupun mengantuk pada saat
berkendara, Buzzer akan berbunyi untuk
mengingatkan pengendara agar kembali
berkonsentrasi mengendalikan
kendaraannya.
Gyroscope (GY-521 MPU-6050)
Giroskop adalah perangkat untuk
mengukur atau mempertahankan orientasi,
yang berlandaskan pada prinsip-prinsip
momentum sudut. Secara mekanis,
giroskop berbentuk seperti sebuah roda
berputar atau cakram di mana poros bebas
untuk mengambil setiap orientasi.
Meskipun orientasi ini tidak tetap,
perubahannya dalam menanggapi torsi
eksternal jauh lebih sedikit dan
berlangsung dalam arah yang berbeda jika
di bandingkan dengan tanpa momentum
sudut, yang berkaitan dengan tingginya
tingkat putaran dan inersia momen.
Orientasi perangkat tetap sama, terlepas
dari gerak platform pemasangan, karena
pemasangan perangkat pada sebuah
gimbal akan meminimalkan torsi
eksternal. (Desty Oktriaviani, 2012)
Gambar 1. Gyroscope
Arduino Nano ATMega328
Arduino adalah papan elektronik
open source yang didalamnya terdapat
komponen utama, yaitu sebuah chip
mikrokontroler Atmega328 dari jenis AVR
dari perusahaan Atmel. Arduino Nano
adalah board arduino berukuran kecil,
lengkap dan berbasis Atmega328 yang
mempunyai kelebihan yang sama
fungsional dengan Arduino jenis apapun.
(Muhammad Syahwil, 2013). Berikut
adalah bentuk dari Arduino Nano
ATMega328 ditunjukan oleh Gambar 3.
Gambar 2. Arduino Nano ATMega328
Hardware atau perangkat keras di
dalam arduino nano adalah :
1. Port Universal Serial Bus (USB).
2. Integrated Circuit (IC) Konverter
Serial USB.
3. Mikrokontroler ATMega328.
3
4. 14 Pin Input Output Digital (Pin
D0-D13), 6 diantaranya port PWM
(Pin 3, 5, 6 , 9, 10, 11).
5. 8 Pin Input Output Analog (Pin
A0-A7).
6. Tegangan masukan (7-12 V).
Sensor Deteksi Air (FR-04)
Modul FR-04 adalah modul untuk
mendeteksi air, Modul FR-04 harus
ditempatkan secara mendatar di luar
ruangan dan diterjemahkan ke dalam data
digital besarnya hujan yang jatuh di
atasnya. Sensor ini dapat mendeteksi air
pada kedua sisi plat sensor. (Meri
Wardana, 2011)
Deskripsi Sensor:
1. Sensor menggunakan kualitas
sensor FR - 04 yang tinggi, luas
materi sensor terdapat pada dua sisi
plat dengan dimensi 5.0 × 4.0 CM,
pelapisan pelat nikel pada
permukaan, mencegah oksidasi,
konduktivitas listrik yang baik, dan
memiliki masa pakai lebih lama;
2. Output komparator, sinyal bersih,
gelombang yang baik.
3. Dengan potensiometer penyesuaian
sensitivitas tegangan kerja dari 3,3
V sampai 5 V
4. Format output: keluaran saklar
digital (0 dan 1) dan tegangan
analog jika dihubungkan dengan
pin AO;
5. Ukuran papan PCB: 3.2 cm x 1.4
cm
6. LM393 yang digunakan sebagai
pembanding tegangan
Gambar 3. Sensor Deteksi Air
Servo Motor (S3003 4.1 kg)
Servo Motor adalah sebuah motor
DC dengan sistem umpan balik tertutup di
mana posisi rotor-nya akan diinformasikan
kembali ke rangkaian kontrol yang ada di
dalam motor servo. Motor ini terdiri dari
sebuah motor DC, serangkaian gear,
potensiometer, dan rangkaian kontrol.
Potensiometer berfungsi untuk
menentukan batas sudut dari putaran
servo. Sedangkan sudut dari sumbu motor
servo diatur berdasarkan lebar pulsa yang
dikirim melalui kaki sinyal dari kabel
motor servo (Purnama, Agus 2014).
Gambar 4. Motor Servo
2. Metode
Penelitian ini dilaksanakan mulai
Bulan Mei 2016 sampai Juli 2016.
Penelitian dilaksanakan di Laboratorium
Workshop FMIPA - UNPAK
Bahan Penelitian :
1. Arduino Nano V3.0 ATMega328
2. Sensor Suhu DHT-11
3. Sensor Deteksi Debu dan Asap
GP2Y1010AU0F
4. Sensor Gyroscope 3 Axis
L3G4200D GY-50
5. Sensor Deteksi Air FR-04
6. Switch Module TTP223B
7. LED RGB
8. Buzzer 5V
9. Hypro Mini Blower 2cm 5V
10. Baterai 4.8V
11. Motor Servo 4.1Kg
12. Helm Full Face
13. Modul Isi Daya TP4056
14. Baut + Mur + Kabel Jumper

4
Alur Sistem
Sistem ini menggunakan Arduino
Nano. Input sistem berupa sensor
Giroskop GY-521 MPU-6050 yang
berfungsi sebagai membaca posisi Helm,
Sensor FR-04 untuk mendeteksi tetesan
Air, DHT-11 untuk membaca suhu dan
kelembaban udara dan Sensor Sentuh
sebagai switch yang peka terhadap
sentuhan. Gambaran umum pada sistem ini
adalah terdiri dari 3 aspek yaitu Input
sistem menggunakan sensor GY-521
MPU-6050, FR-04, Sensor Sentuh dan
DHT-11. Kontrol sistem menggunkan
Arduino Nano. Output sistem yaitu RGB
LED, Buzzer, Blower dan Motor Servo.
Prototip Helm Cerdas berbasi
Arduino Nano ini memiliki prinsip kerja
sebagai berikut : Sistem ini dapat berjalan
dengan optimal dengan daya DC 5V.
Inputan berupa Sensor Giroskop, Sensor
Deteksi Air, Sensor Deteksi Suhu &
Kelembaban dan Sensor Sentuh. Nilai
yang terbaca Sensor akan di Proses Oleh
Mikro Kontroller Arduino Nano kemudian
dijadikan pemicu untuk menyalakan Motor
Servo, Blower, Buzzer dan RGB LED.
Gambar 5. Sketsa Alur Sistem
Desain Mekanis
1. Penempatan komponen-komponen
elelktonik dibuat semaksimal
mungkin untuk menghasilkan
kinerja sistem yang optimal.
2. Massa keseluruhan sistem dibuat
seminimal mungkin, karena itu
model pengatur suhu dan
kelembaban kandang ayam broiler
dibuat dengan menggunakan bahan
dasar akrilik.
3. Bentuk dan ukuran model
pengatur suhu dan kelembaban
kandang ayam broiler dibuat
dengan bentuk persegi panjang
untuk menghasilkan bentuk akhir
yang ideal.
Gambar 6. Desain Mekanik
Desain Elektrik
Dalam desain sistem elektrik
terdapat beberapa hal yang harus
diperhatikan, antara lain :
1. Sumber catu daya
Catu daya yang akan digunakan
pada rangkaian Prototip Helm
Cerdas ini menggunakan sumber
catu daya DC 5 V yang dibagi
menjadi 2 yaitu daya internal 3,3V
dari Arduino dan 5V langsung dari
baterai.
5
2. Microcontroller
Microcontroller yang akan
digunakan dalam penelitian ini,
menggunakan Arduino Nano
dengan IC mikrokontroler
ATMega328.
3. Desain sistem kontrol
Desain sistem kontrol untuk
mendukung sistem ini
menggunakan software Arduino
IDE untuk menerjemahkan listing
program dalam bentuk bahasa
pemrograman C.
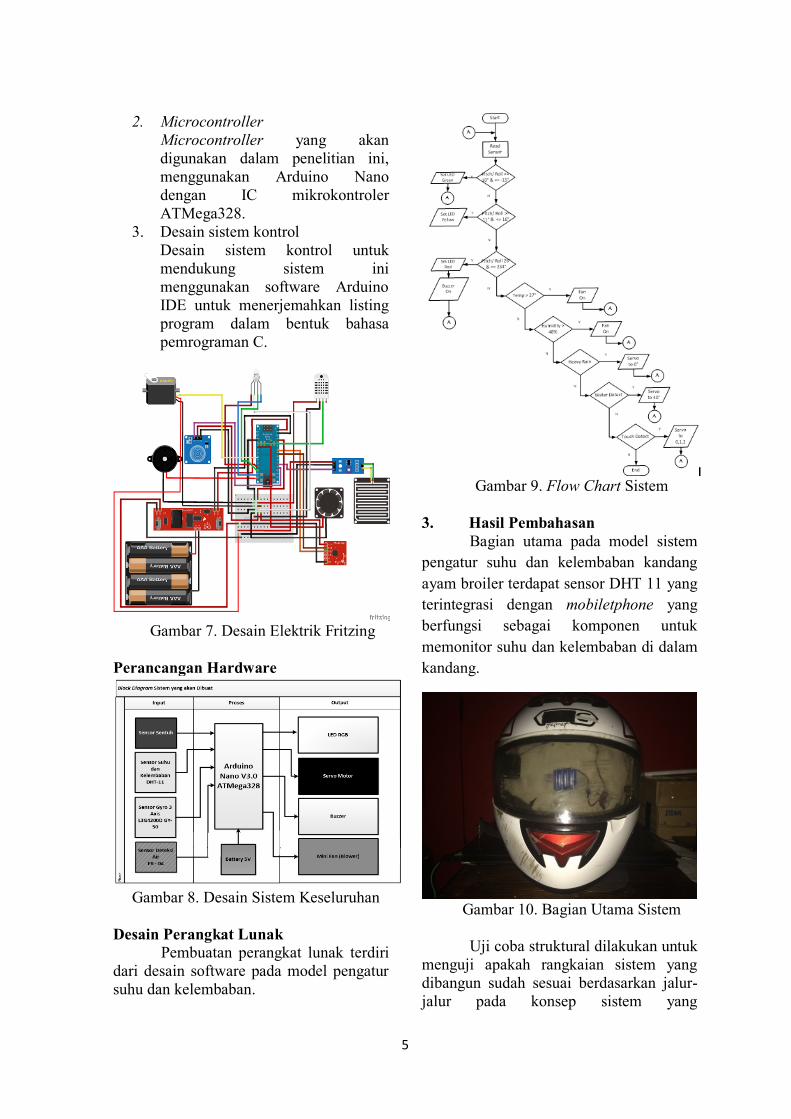
Gambar 7. Desain Elektrik Fritzing
Perancangan Hardware
Gambar 8. Desain Sistem Keseluruhan
Desain Perangkat Lunak
Pembuatan perangkat lunak terdiri
dari desain software pada model pengatur
suhu dan kelembaban.
Gambar 9. Flow Chart Sistem
3. Hasil Pembahasan
Bagian utama pada model sistem
pengatur suhu dan kelembaban kandang
ayam broiler terdapat sensor DHT 11 yang
terintegrasi dengan mobiletphone yang
berfungsi sebagai komponen untuk
memonitor suhu dan kelembaban di dalam
kandang.
Gambar 10. Bagian Utama Sistem
Uji coba struktural dilakukan untuk
menguji apakah rangkaian sistem yang
dibangun sudah sesuai berdasarkan jalur-
jalur pada konsep sistem yang
6
direncanakan. Pada tahap ini dilakukan
pengujian yang bertujuan untuk
mengetahui apakah modul-modul
elektronik sudah terhubung dengan benar
sehingga sistem dapat berjalan berfungsi
dengan baik dan memiliki performa serta
fungsi yang sesuai dengan rancangan.
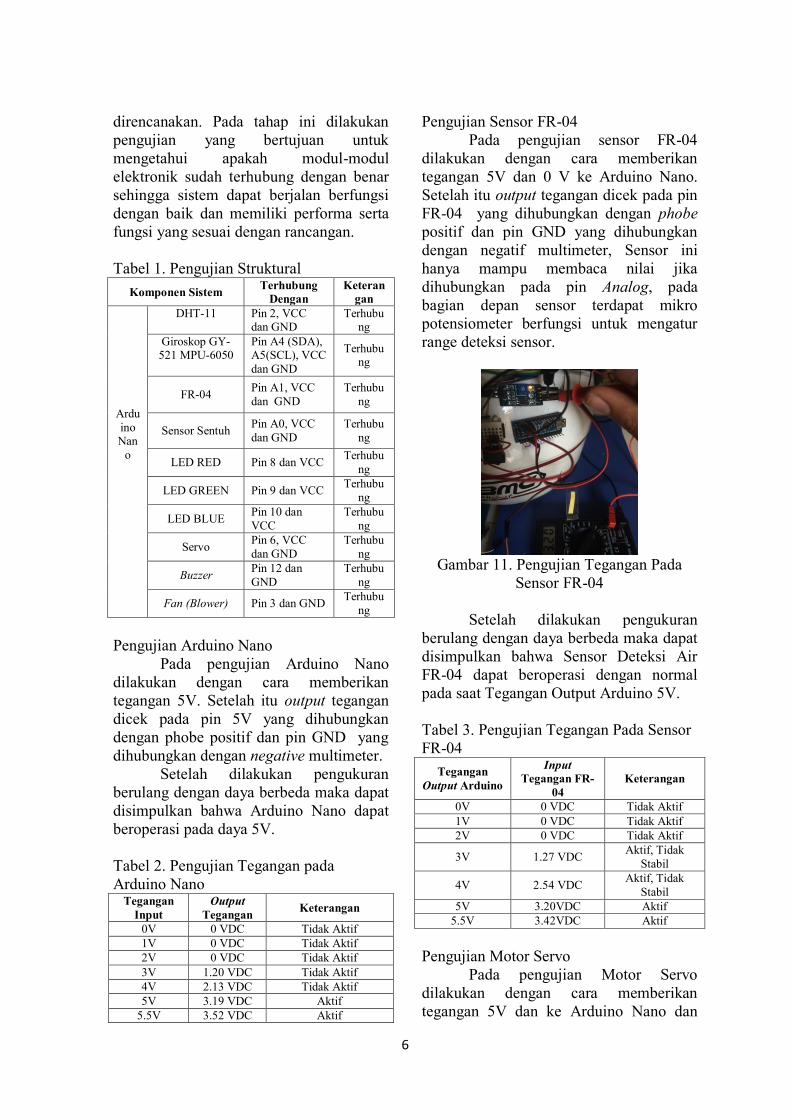
Tabel 1. Pengujian Struktural
Komponen Sistem Terhubung
Dengan
Keteran
gan
Ardu
ino Nan
o
DHT-11 Pin 2, VCC dan GND
Terhubung
Giroskop GY-521 MPU-6050
Pin A4 (SDA), A5(SCL), VCC
dan GND
Terhubung
FR-04 Pin A1, VCC
dan GND
Terhubu
ng
Sensor Sentuh Pin A0, VCC
dan GND
Terhubu
ng
LED RED Pin 8 dan VCC Terhubu
ng
LED GREEN Pin 9 dan VCC Terhubu
ng
LED BLUE Pin 10 dan
VCC
Terhubu
ng
Servo Pin 6, VCC
dan GND
Terhubu
ng
Buzzer Pin 12 dan
GND
Terhubu
ng
Fan (Blower) Pin 3 dan GND Terhubu
ng
Pengujian Arduino Nano
Pada pengujian Arduino Nano
dilakukan dengan cara memberikan
tegangan 5V. Setelah itu output tegangan
dicek pada pin 5V yang dihubungkan
dengan phobe positif dan pin GND yang
dihubungkan dengan negative multimeter.
Setelah dilakukan pengukuran
berulang dengan daya berbeda maka dapat
disimpulkan bahwa Arduino Nano dapat
beroperasi pada daya 5V.
Tabel 2. Pengujian Tegangan pada
Arduino Nano Tegangan
Input
Output
Tegangan Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0 VDC Tidak Aktif
3V 1.20 VDC Tidak Aktif
4V 2.13 VDC Tidak Aktif
5V 3.19 VDC Aktif
5.5V 3.52 VDC Aktif
Pengujian Sensor FR-04
Pada pengujian sensor FR-04
dilakukan dengan cara memberikan
tegangan 5V dan 0 V ke Arduino Nano.
Setelah itu output tegangan dicek pada pin
FR-04 yang dihubungkan dengan phobe
positif dan pin GND yang dihubungkan
dengan negatif multimeter, Sensor ini
hanya mampu membaca nilai jika
dihubungkan pada pin Analog, pada
bagian depan sensor terdapat mikro
potensiometer berfungsi untuk mengatur
range deteksi sensor.
Gambar 11. Pengujian Tegangan Pada
Sensor FR-04
Setelah dilakukan pengukuran
berulang dengan daya berbeda maka dapat
disimpulkan bahwa Sensor Deteksi Air
FR-04 dapat beroperasi dengan normal
pada saat Tegangan Output Arduino 5V.
Tabel 3. Pengujian Tegangan Pada Sensor
FR-04
Tegangan
Output Arduino
Input
Tegangan FR-
04
Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0 VDC Tidak Aktif
3V 1.27 VDC Aktif, Tidak
Stabil
4V 2.54 VDC Aktif, Tidak
Stabil
5V 3.20VDC Aktif
5.5V 3.42VDC Aktif
Pengujian Motor Servo
Pada pengujian Motor Servo
dilakukan dengan cara memberikan
tegangan 5V dan ke Arduino Nano dan
7
menghubungkan seluruh pin ke Motor
Servo. Setelah itu output tegangan dicek
pada pin Arduino Nano yang dihubungkan
dengan phobe positif dan pin GND yang
dihubungkan dengan negatif pada
multimeter.
Setelah dilakukan pengukuran
berulang dengan daya berbeda maka dapat
disimpulkan bahwa Motor Servo dalam
keadaan siap menerima inputan pada saat
Tegangan Output Arduino 5V.
Tabel 4. Pengujian Tegangan Pada Motor
Servo Tegangan
Arduino
Input Tegangan
Motor Servo Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0 VDC Tidak Aktif
3V 1.36 VDC Tidak Aktif
4V 2.68 VDC Tidak Aktif
5V 3 VDC Stand- By
5.5V 3.12 VDC Stand- By
Pengujian Sensor Giroskop
Pada pengujian Giroskop dilakukan
dengan cara memberikan tegangan 5V dan
0V ke Arduino Nano dan menghubungkan
pin pada GND, VCC, dan data. Setelah itu
output tegangan dicek pada pin Vout yang
dihubungkan dengan phobe positif dan pin
GND yang dihubungkan dengan negatif
pada multimeter.
Gambar 12. Pengujian Tegangan Pada
Giroskop
Setelah dilakukan pengukuran
berulang dengan daya berbeda maka dapat
disimpulkan bahwa Giroskop akan stabil
membaca nilai pada saat Tegangan Output
Arduino 5V.
Tabel 5. Pengujian Tegangan Pada
Giroskop Tegangan
Arduino
Input Tegangan
Giroskop Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0 VDC Tidak Aktif
3V 1.6 VDC Tidak Aktif
4V 2.77 VDC Aktif, Tidak
Stabil
5V 3.1 VDC Aktif
5.5V 3.2VDC Aktif
Pengujian Sensor DHT-11
Pada pengujian sensor DHT-11
dilakukan dengan cara memberikan
tegangan 5V dan 0V ke Arduino Nano dan
menghubungkan pin pada GND, VCC, dan
data. Setelah itu output tegangan dicek
pada pin Vout yang dihubungkan dengan
phobe positif dan pin GND yang
dihubungkan dengan negatif pada
multimeter.
Gambar 13. Pengujian Tegangan
Pada Sensor DHT-11
Setelah dilakukan pengukuran
berulang dengan daya berbeda maka dapat
disimpulkan bahwa Giroskop akan stabil
membaca nilai pada saat Tegangan Output
Arduino 5V.
8
Tabel 6. Pengujian Tegangan Pada DHT-
11 Tegangan
Arduino
Input Tegangan
DHT-11 Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0 VDC Tidak Aktif
3V 1.15 VDC Tidak Aktif
4V 2.42 VDC Aktif, Tidak
Stabil
5V 2.8 VDC Aktif
5.5V 3 VDC Aktif
Pengujian Sensor Sentuh
Pada pengujian Sensor Sentuh
dilakukan dengan cara memberikan
tegangan 5V dari Arduino Nano dan
menghubungkan pin pada Sensor seperti
GND, VCC, dan data.
Tabel 7. Pengujian Tegangan Pada Sensor
Sentuh Tegangan
Arduino
Input Tegangan
Servo Keterangan
0V 0 VDC Tidak Aktif
1V 0 VDC Tidak Aktif
2V 0.15 VDC Tidak Aktif
3V 2.35 VDC Tidak Aktif
4V 2.78 VDC Tidak Aktif
5V 3.07 VDC Aktif
5.5V 3.27 VDC Aktif
Uji Coba Validasi
Tahap uji coba validasi dilakukan
dengan cara menguji dari nilai
kemungkinan kesalahan yang dapat terjadi
pada komponen-komponen yang
diimplementasikan pada Prototip Helm
Cerdas.
Uji Coba Validasi Giroskop
Fungsi dari komponen Giroskop
adalah untuk membaca posisi Helm secara
terus menerus, data yang di dapat akan
diolah untuk menjadi output berupa RGB
LED dan Buzzer.
Uji coba dilakukan dengan menguji
kecocokan sistem yang telah dibuat
dengan memvalidasi pada masing-masing
blok rangkaian yang bertujuan untuk
mendapatkan hasil yang sesuai.
Tabel 8. Uji Coba Validasi Giroskop
N
o Pengujian
Hasil yang
Diharapka
n
Hasil
Pengujian Status
1
.
Helm dalam
Posisi Tegak/
Keadaan
Normal
LED warna
Hijau
menyala
LED warna
Hijau
menyala
Sesuai
2
.
Helm dalam
Posisi Miring
ke Kiri
Sedikit
LED warna
Kuning
menyala
LED warna
Kuning
menyala
Sesuai
3
.
Helm dalam
Posisi Sangat
Miring ke
Kiri
LED warna
Merah
menyala
dan Buzzer
berbunyi 1
detik
LED warna
Merah
menyala dan
Buzzer
berbunyi 1
detik
Sesuai
4
.
Helm dalam
Posisi Miring
ke Kanan
Sedikit
LED warna
Kuning
menyala
LED warna
Kuning
menyala
Sesuai
5
.
Helm dalam
Posisi Sangat
Miring ke
Kanan
LED warna
Merah
menyala
dan Buzzer
berbunyi 1
detik
LED warna
Merah
menyala dan
Buzzer
berbunyi 1
detik
Sesuai
6
.
Helm dalam
Posisi Miring
ke Depan
Sedikit
LED warna
Kuning
menyala
LED warna
Kuning
menyala
Sesuai
7
.
Helm dalam
Posisi Sangat
Miring ke
Depan
LED warna
Merah
menyala
dan Buzzer
berbunyi 1
detik
LED warna
Merah
menyala dan
Buzzer
berbunyi 1
detik
Sesuai
8
.
Helm dalam
Posisi Miring
ke Belakang
Sedikit
LED warna
Kuning
menyala
LED warna
Kuning
menyala
Sesuai
9
.
Helm dalam
Posisi Sangat
Miring ke
Belakang
LED warna
Merah
menyala
dan Buzzer
berbunyi 1
detik
LED warna
Merah
menyala dan
Buzzer
berbunyi 1
detik
Sesuai
9
Uji Coba Validasi Sensor FR-04
Fungsi dari komponen Sensor FR-
04 adalah untuk mendeteksi tetesan Air
yang kemudian akan dijadikan sebagai
penentu posisi Motor Servo.
Tabel 9. Uji Coba Validasi Sensor FR-04
No Pengujian Hasil yang
Diharapkan
Hasil
Pengujian
Stat
us
1. Plat Sensor
dikeringkan
Kaca Helm
tetap pada
posisi
Kaca Helm
tetap pada
posisi
Ses
uai
2.
Plat Sensor
ditetesi 1
Tetes Air
Servo
memutar
Kaca Helm
ke posisi
40°
Servo
memutar
Kaca Helm ke
posisi 40°
Ses
uai
3.
Plat Sensor
ditetesi 2
Tetes Air
Servo
memutar
Kaca Helm
ke posisi
40°
Servo
memutar
Kaca Helm ke
posisi 40°
Ses
uai
4.
Plat Sensor
ditetesi 3
Tetes Air
Servo
memutar
Kaca Helm
ke posisi
40°
Servo
memutar
Kaca Helm ke
posisi 40°
Ses
uai
5.
Plat Sensor
ditetesi 4
Tetes Air
Servo
memutar
Kaca Helm
ke posisi
40°
Servo
memutar
Kaca Helm ke
posisi 0°
Tida
k
Ses
uai
6.
Plat Sensor
ditetesi 5
Tetes Air
Servo
memutar
Kaca Helm
ke posisi 0°
Servo
memutar
Kaca Helm ke
posisi 0°
Ses
uai
7.
Plat Sensor
ditetesi 6
Tetes Air
Servo
memutar
Kaca Helm
ke posisi 0°
Servo
memutar
Kaca Helm ke
posisi 0°
Ses
uai
Uji Coba Validasi Sensor DHT-11
Fungsi dari komponen Sensor
DHT-11 adalah membaca nilai Suhu dan
Kelembaban yang akan dijadikan pemicu
untuk menyalakan Blower.
Tabel 10. Uji Coba Validasi Sensor DHT-
11
No Pengujian
Hasil
yang
Diharap
kan
Hasil
Pengujia
n
Stat
us
1.
Helm di gunakan
pada tempat dengan
Suhu Dingin (kurang
dari 26°C)
Blower
tidak
aktif
Blower
tidak
aktif
Sesu
ai
2.
Helm di gunakan
pada tempat dengan
Suhu Dingin (lebih
dari 25°C)
Blower
aktif
Blower
aktif
Sesu
ai
3.
Helm di gunakan
pada tempat dengan
Kelembaban Sedang/
Siang Hari (kurang
dari 47%)
Blower
tidak
aktif
Blower
tidak
aktif
Sesu
ai
4.
Helm di gunakan
pada tempat dengan
Kelembaban Sedang/
Pagi Hari (kurang
dari 48%)
Blower
aktif
Blower
aktif
Sesu
ai
Uji Coba Validasi Sensor Sentuh
Fungsi dari komponen Sensor
Sentuh adalah membaca sebaga Switch/
Saklar yang kemudian nilai yang terbaca
akan digunakan untuk mengubah posisi
Servo.
Tabel 11. Uji Coba Validasi Sensor Sentuh
No Pengujian Hasil yang
Diharapkan
Hasil
Pengujian
Stat
us
1.
Disentuh
dalam waktu
0.25 Detik
Servo tidak
bergerak
Servo tidak
bergerak
Sesu
ai
2.
Disentuh
dalam waktu
0.5 Detik
Servo tidak
bergerak
Servo tidak
bergerak
Sesu
ai
3.
Disentuh
dalam waktu
1 Detik
Servo
bergerak Servo bergerak
Sesu
ai
4.
Disentuh
dalam waktu
1 Detik
Servo
bergerak Servo bergerak
Sesu
ai
Tahap pengujian sistem prototip helm
cerdas
Dalam pengujian ini dilakukan
beberapa kali pengujian kemiringan Helm
pada saat digunakan untuk mengetahui
respon yang akan diberikan berdasarkan
kemiringan terhadap sumbu z (pitch) lebih
dari 17 derajat.
10
Tabel 12. Uji Coba Optimasi dengan
kemiringan Pitch lebih dari 17°
Ulang
an
Sudut
Kemi
ringa
n
Time
step
Delay
Buzze
r
Berbu
nyi
Delay
LED
Mera
h
Keteran
gan
1 18° 1
Detik 2,14 2,22
Terlalu
Miring
2 18° 1
Detik 2,11 2,26
Terlalu
Miring
3 18° 1
Detik 2,05 2,14
Terlalu
Miring
4 18° 1
Detik 2,30 2,41
Terlalu
Miring
5 18° 1
Detik 2,24 2,43
Terlalu
Miring
6 18° 1
Detik 2,17 2,23
Terlalu
Miring
7 18° 1
Detik 2,32 2,39
Terlalu
Miring
8 18° 1
Detik 2,29 2,33
Terlalu
Miring
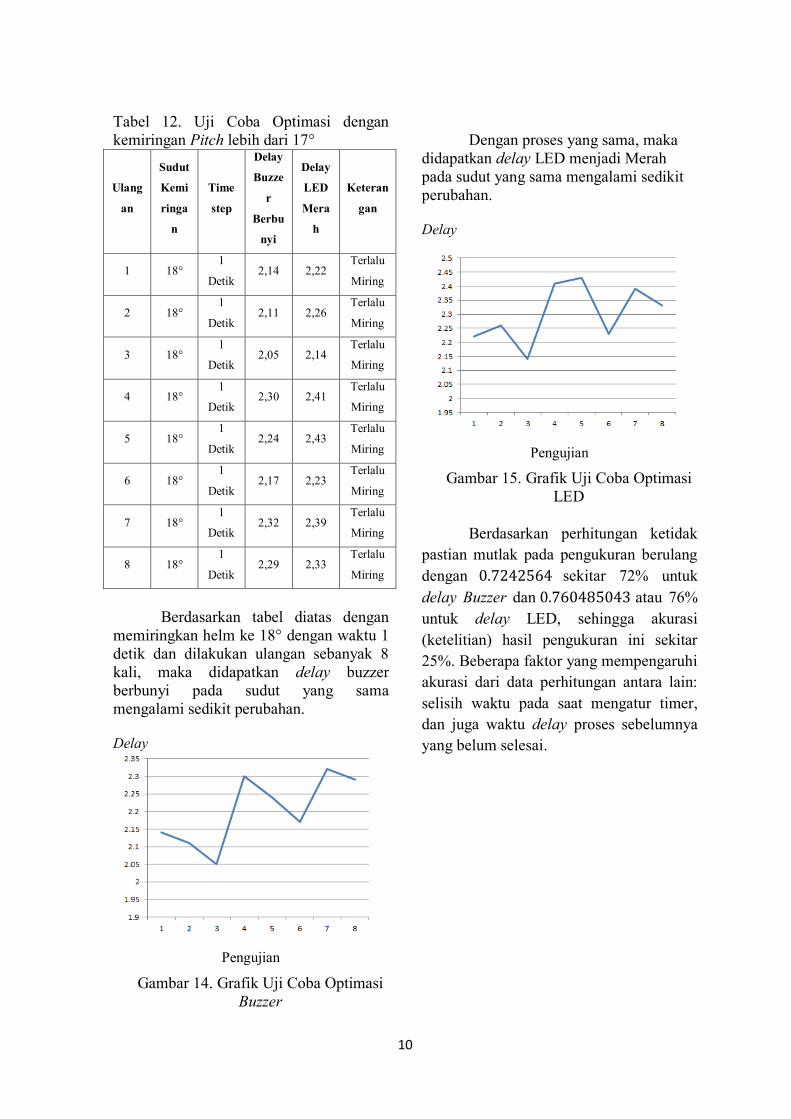
Berdasarkan tabel diatas dengan
memiringkan helm ke 18° dengan waktu 1
detik dan dilakukan ulangan sebanyak 8
kali, maka didapatkan delay buzzer
berbunyi pada sudut yang sama
mengalami sedikit perubahan.
Delay
Pengujian
Gambar 14. Grafik Uji Coba Optimasi
Buzzer
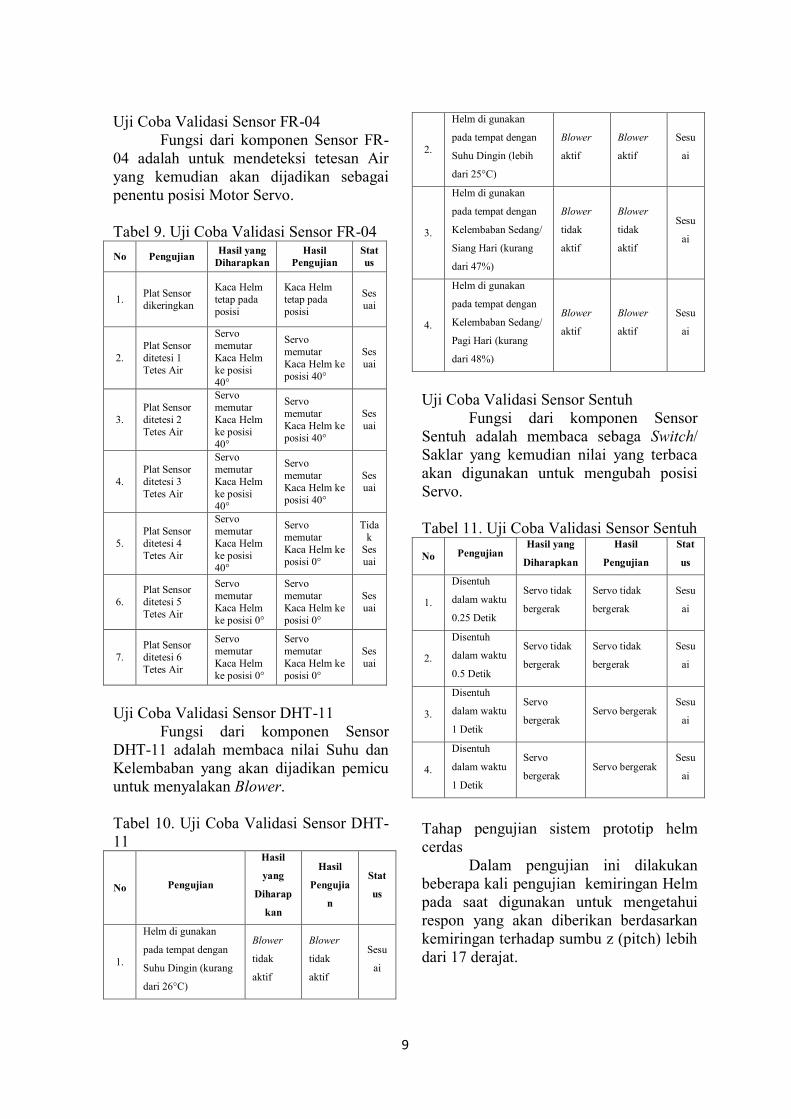
Dengan proses yang sama, maka
didapatkan delay LED menjadi Merah
pada sudut yang sama mengalami sedikit
perubahan.
Delay
Pengujian
Gambar 15. Grafik Uji Coba Optimasi
LED
Berdasarkan perhitungan ketidak
pastian mutlak pada pengukuran berulang
dengan 0.7242564 sekitar 72% untuk
delay Buzzer dan 0.760485043 atau 76%
untuk delay LED, sehingga akurasi
(ketelitian) hasil pengukuran ini sekitar
25%. Beberapa faktor yang mempengaruhi
akurasi dari data perhitungan antara lain:
selisih waktu pada saat mengatur timer,
dan juga waktu delay proses sebelumnya
yang belum selesai.
11
4. Kesimpulan
Secara keseluruhan sistem ini
diimplementasikan dalam bentuk prototip.
Sistem ini dapat langsung
diimplementasikan pada Helm Motor
tanpa mengubah modul-modul dan
komponen di dalam sistem, Jika sensor
Giroskop membaca posisi Helm terlalu
miring terhadap Sumbu X dan Z maka
buzzer dan LED indikator berwarna merah
akan aktif. Jika sensor Giroskop membaca
posisi Helm miring sedikit terhadap
Sumbu X dan Z, LED indikator berwarna
kuning akan aktif. Jika sensor Giroskop
membaca posisi Helm tegak lurus terhadap
Sumbu X dan Z, LED indikator akan
berwarna hijau. Buzzer dengan posisi dan
volume yang sudah diatur sudah cukup
efektif sebagai peringatan untuk
pengendara agar kembali fokus pada jalan.
Sensor deteksi air yang menjadi
pemicu untuk menutupnya kaca helm
cukup efektif jika diletakkan pada bagian
atas dan agak condong ke depan Helm
agar tetesan air hujan bisa langsung
terdeteksi dengan mudah. Intensitas
tetesan air yang terdeteksi pada plat harus
diperhitungkan untuk menentukan kaca
Helm apakah harus terbuka sebagian
ataupun tertutup penuh. Servo untuk
menggerakkan kaca Helm haruslah yang
memiliki kemapuan angkat yang cukup
agar perpindahan posisi berjalan lancar.
Sensor suhu dan kelembaban DHT-
11 harus diposisikan di sekitar bagian pipi
pada Helm agar suhu yang didapat adalah
suhu dan kelembaban bagian dalam Helm
bukan dikarenakan oleh nafas pengendara.
Perbedaan suhu dan kelembaban dalam
dan luar bagian Helm yang akan
menghasilkan Embun pada bagian dalam
kaca Helm, Embun ini akan hilang saat
Mini Fan dinyalakan.
DAFTAR PUSTAKA
Atmel. ATMEGA328 Datasheet. USA. 24
Mei 2016.
China. 2009. Element For Automation,
Monitoring And Control ,
ELMARK.
Dermanto. 2014. Motor Servo. Desain
Sistem Kontrol.
Evans, Brian. 2011. Beginning Arduino
Programming. Apress.
Erianto Miduk. 2013. Definisi
Kelembaban
Futaba. SERVO-S3003 Datasheet. Japan.
24 Mei 2016.
InvenSense. MPU-6050 Datasheet. USA.
25 Mei 2016
Juniarto. 2010. Buzzer, Juniarto1985's.
Karvinen, Kimmo & Karvinen, Tero.
2011. Make: Arduino Bots and
Gadgets. Sebastopol: O’Reilly
Media, Inc.
Related Documents











