PEMBERI PAKAN IKAN OTOMATIS BERBASIS MIKROKONTROLER ATMEGA8535 PROYEK AKHIR Diajukan Kepada Fakultas Teknik Universitas Negeri Yogyakarta Untuk Memenuhi Sebagian Persyaratan Guna Memperoleh Gelar Ahli Madya Disusun Oleh : Nuning Afriyanti 05506131007 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA AGUSTUS 2008 i

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
PEMBERI PAKAN IKAN OTOMATIS
BERBASIS MIKROKONTROLER ATMEGA8535
PROYEK AKHIR
Diajukan Kepada Fakultas Teknik Universitas Negeri Yogyakarta Untuk Memenuhi Sebagian Persyaratan
Guna Memperoleh Gelar Ahli Madya
Disusun Oleh :
Nuning Afriyanti 05506131007
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS NEGERI YOGYAKARTA AGUSTUS 2008
i
ii

iii
iv

PEMBERI PAKAN IKAN OTOMATIS
BERBASIS MIKROKONTROLLER ATMEGA8535
Oleh :
Nuning Afriyanti 05506131007
ABSTRAK
Tujuan proyek ahkir ini adalah untuk membuat prototype pemberi pakan ikan otomatis berbasis mikrokontroller. Kendali mikrokontroller yang digunakan adalah ATMega8535 dan ATMega8 yang difungsikan untuk mengendalikan kerja motor serta untuk menentukan penyetingan jam.
Metode yang digunakan dalam proyek akhir ini adalah pengembagan alat pemberi pakan ikan berbasis mikrokontroller ATMega8535. Adapun langkah-langkah yang digunakan yaitu analisis kebutuhan alat, pembuatan mekanik serta kontrol dan pengambilan data. Perancangan sistem ini terdiri dari 5 bagian yaitu : sistem minimum mikrokontroller ATMega8535 dan mikrokontroller ATMega8, driver relay dan rangkaian driver relay serta catu daya. Sistem minimum mikrokontroller ATMega8535 digunakan sebagai kendali utama yaitu untuk menjalankan motor, sedangkan ATMega8 digunakan untuk penyetingan jam digital. ULN2804A digunakan sebagai antarmuka antara mikrokontroller dengan rangkaian daya (motor). Sedangkan rangkaian driver relay berfungsi mengatur aktif tidaknya motor power window sebagai pembuka dan penutup kran, jalan nya rel (baik maju atau mundur), serta untuk memutar piringan.
Berdasarkan pengujian dan unjuk kerja dari alat pemberi pakan ikan otomatis berbasis mikrokontroller ATMega8535 telah menunjukkan hasil yang sesuai dengan rancangan yaitu mampu menebarkan pelet secara otomatis berdasarkan setingan waktu yang telah ditentukan. Pada saat alat ini bekerja bobot pelet yang dikeluarkan sangat bergantung pada lama tidak nya waktu membuka kran tersebut.
v
MOTTO
”Barang siapa melihat kemungkaran maka hendaknya dia mengubah
dengan tangan nya (kekuasaan Nya ), jika tidak bisa maka dengan
lisannya, jika tidak bisa juga maka dengan hatinya dan itulah
selemah-lemahnya iman”.(Al-Hadist)
”Jangan Menoreh kebelakang terlalu lama, cukuplah pandang
sekilas untuk tentukan langkah kedepan yang lebih baik ” .
”Sesungguhnya sesudah kesulitan itu ada kemudahan, maka apabila
kamu telah selesai (dari suatu urusan), kerjakanlah dengan
sungguh-sungguh (urusan) yang lain”. (Q>S. Al-Insyiroh : 6-7)
vi

Dengan segala kerendahan hati kupersembahkan karya ku ini
untuk :
Orang tuaku tercinta, terimakasih untuk do’a serta bimbingan yang telah
engkau berikan padaku, kasih sayangmu akan selalu terkenang
sepanjang usiaku.
Adik-adik ku yang selalu menjadi sumber inspirasi serta motivasi untuk
ku selalu berjuang. Kalian semua pahlawan kecil ku.
Seluruh keluarga ku tercinta, doa kalian lah yang mampu menjadikan ku
untuk tetap terus maju menggapai cita-cita.
Sahabat seperjuanganku (tyas, wati, nita, tika, ayu, gandhi, emon,
ganjar, retno, darmin, galih) terima kasih untuk dukungan nya, dan
semua angkatan ’05, ayo berjuang.........
Keluarga kedua ku di C.10 (amie, indah, wince, shinta, tanti, dini,
rizma), terima kasih untuk bantuan kalian selama ini.
Buat anak-anak Lampung-Tengah yang ada di Jogja tanpa terkecuali,
terima kasih untk semuanya.
Seluruh orang yang pernah aku kenal dan pernah mengisi hari-hariku
dari aku kecil hingga saat ini.......
vii
KATA PENGANTAR
Alhamdulillahi rabbil ’alamin, segala puji dan syukur hanya pantas terucap
ngan judul “PEMBERI PAKAN IKAN OTOMATIS
BE
rasa syukur akhirnya tugas akhir ini terwujud nyata.
aku Rektor Universitas Negeri
2. n Suyanto, Ed.D selaku Dekan Fakultas Teknik Universitas
3. .Pd.M.T selaku Ketua Jurusan Teknik Elektro
4. Prodi Teknik Teknik Elektro, sekaligus
5. lektro, yang tidak dapat
bagi Sang Pemilik jiwa, Allah SWT yang telah memberikan kekuatan,
kesehatan, dan kemudahan sehingga penulis dapat menyelesaikan tugas akhir
ini. Sholawat teriring salam semoga selalu tercurah kepada suri tauladan, Nabi
Muhammad SAW.
Tugas akhir de
RBASIS MIKROKONTROLLER ATMEGA8535” ini disusun untuk
memenuhi salah satu syarat untuk menyelesaikan pendidikan Program
Diploma III di Jurusan Teknik Elektro Fakultas Teknik Universitas Negeri
Yogyakarta.
Dengan segenap
Semoga dapat memberikan manfaat bagi semua pihak, khususnya bagi
kemajuan dibidang teknologi. Dengan hati yang tulus penulis sampaikan rasa
terima kasih yang sebesar-besarnya kepada :
1. Bapak Prof. Sugeng Mardiyono,Ph.D sel
Yogyakarta.
Bapak Warda
Negeri Yogyakarta.
Bapak Mutaqin, M
Universitas Negeri Yogyakarta.
Bapak Sukir, M.T, selaku Ketua
sebagai Dosen Pembimbing. Terima kasih atas bimbingannya yang telah
diberikan dalam penyusunan Proyek Akhir ini.
Bapak serta ibu dosen di jurusan Teknik E
disebutkan satu persatu, terima kasih untuk ilmu yang telah diberikan
kepada penulis, semoga menjadi ilmu yang bermafaat. Amin.......!
viii
6. Bapak, ibu, terima kasih untuk doa, semangat, serta materil yang selalu
kalian berikan untuk Ananda selama ini, semua yang telah kalian berikan
tak mampu untuk ku membalasnya.
7. Saudara-saudara seperjuangan ku di Teknik Elektro angkatan 2005 yang
tidak dapat saya sebutkan satu persatu, yang telah menjadi keluarga kedua
ku selama hidup di Jogja, terima kasih atas warna-warni indah dilembaran
kehidupanku.
8. Semua pihak yang telah banyak memberikan bantuan baik moril maupun
materil untuk terselesainya proyek akhir ini. Semoga kebaikan kalian
menjadi amal ibadah.
Dalam penyusunan tugas akhir ini, penulis menyadari bahwa masih
banyak kekurangan baik dalam isi maupun penyusunannya, untuk itu masukan
berupa kritik dan saran sangat penulis harapkan demi kesempurnaan dan
kemajuan dimasa akan datang. Akhirnya penulis berharap semoga tugas akhir
ini bermanfaat bagi penulis dan semua pihak serta dapat menjadi amal ibadah.
Amien.
Yogyakarta, 08 Agustus 2008 Penulis,
Nuning Afriyanti NIM. 05506131007
ix
DAFTAR ISI
Halaman
HALAMAN JUDUL .................................................................................... i
HALAMAN PERSETUJUAN ..................................................................... ii
HALAMAN PENGESAHAN ...................................................................... iii
HALAMAN PERNYATAAN ..................................................................... iv
ABSTRAK ................................................................................................... v
HALAMAN MOTTO .................................................................................. vi
HALAMAN PERSEMBAHAN ................................................................... vii
KATA PENGANTAR .................................................................................. viii
DAFTAR ISI ................................................................................................ x
DAFTAR GAMBAR ................................................................................... xiii
DAFTAR TABEL ........................................................................................ xv
LAMPIRAN .................................................................................................
BAB I PENDAHULUAN
A. Latar Belakang .................................................................. 1
B. Identifikasi Masalah .......................................................... 3
C. Batasan Masalah ................................................................ 3
D. Rumusan Masalah ............................................................. 4
E. Tujuan ................................................................................ 4
F. Manfaat .............................................................................. 4
G. Keaslian Gagasan .............................................................. 6
BAB II PENDEKATAN PEMECAHAN MASALAH
A. Pengertian Umum Mikrokontroller ................................... 7
1. Mikrokontroller ATMega8535 ................................. 7
2. Struktur Memori Data ATMega8535 ……………... 10
x
3. Status Register (SREG) Pada Mikrokontroller
ATMega8535 ……………………………………... 11
B. ATMega8 .......................................................................... 13
1. Konfigurasi Pin AVR ATMega8 ………………….. 15
2. Stack Pointer ……………………………………… 17
3. Timer AVR ATMega8 ……………………………. 17
C. LCD .................................................................................. 18
D. Motor DC (Power Window) …………………………….. 21
E. Driver Motor (ULN2804A) ……………………………... 24
F. Catu Daya .......................................................................... 26
G. Relay .................................................................................. 27
H. Limit Switch ...................................................................... 30
I. Diagram Alir (Flowchart) ………………………………. 31
BAB III KONSEP PERANCANGAN DAN PENGUJIAN
A. Analisis Kebutuhan ........................................................... 33
B. Konsep Perancagan ........................................................... 34
1. Proses pembuatan Hardware ................................... 35
2. Pembuatan mekanik Box ......................................... 36
3. Pembuatan Mekanik ................................................. 37
4. Perancangan Perangkat Lunak ................................. 37
C. Perancangan Rangkaian .................................................... 39
1. Rangkaian catu daya ................................................. 39
xi
2. Rangkaian Mikrokontroller ATMega8535,
ATMega8, dan ULN2804A ......................................41
3. Rangkaian display jam, menit dan detik .................. 44
4. Driver Relay (ULN2804A) ...................................... 45
5. Rangkaian Driver Relay ........................................... 45
D. Rencana Pengujian ............................................................ 47
1. Langkah-langkah pengambilan data ………………. 47
2. Alat dan bahan yang digunakan …………………... 47
3. Perencanaan tabel pengujian ……………………… 47
BAB IV HASIL PENGUJIAN DAN PEMBAHASAN
A. Hasil Pengujian Alat …………………………………….. 48
1. Pengujian Perangkat Keras ....................................... 48
2. Pengujian Perangkat Lunak ...................................... 53
B. Pembahasan ....................................................................... 56
BAB V KESIMPULAN DAN SARAN
A. Kesimpulan ........................................................................ 59
B. Keterbatasan Alat .............................................................. 60
C. Saran-saran ........................................................................ 60
DAFTAR PUSTAKA ................................................................................. 62
LAMPIRAN
xii
DAFTAR GAMBAR
Halaman
Gambar 1. IC Mikrokontroller ATMega8535 ………………………… 9
Gambar 2. Konfigurasi Memori Data AVR ATMega8535 ................... 11
Gambar 3. Status Register ATMega8535 …………………………...... 12
Gambar 4. Konfigurasi pin-pin ATmega8 …………………………..... 15
Gambar 5. Liquid Crystal Display …………………………………..... 19
Gambar 6. Metode kendali sebuah segmen LCD …………………….. 20
Gambar 7. Metode Pengendalian 7-segmen LCD ……………………. 21
Gambar 8. Bentuk fisik motor Power Window ……………………….. 22
Gambar 9. Bentuk fisik dari IC ULN2804A .......................................... 24
Gambar 10. Rangkaian transistor Darlington …………………………. 25
Gambar 11. Konfigurasi pin pada LM78xx ……………………………. 26
Gambar 12. Skema Relay Elektromekanik .............................................. 28
Gambar 13. Rangkaian Dan Simbol Logika Relay …………………….. 29
Gambar 14. Relay Yang Terdapat Di Pasaran ........................................ 30
Gambar 15. Limit Switch Yang Terdapat Di Pasaran ............................. 30
Gambar 16. Diagram blok sistem secara umum ...................................... 33
Gambar 17. Box rangkaian ...................................................................... 36
Gambar 18. Kerangka Mekanik ............................................................... 37
Gambar 19. Diagram Alur Program ......................................................... 38
Gambar 20. Rangkaian catu daya ............................................................. 39
xiii
Gambar 21. Rangkaian Mikrokontroller ATMega8535, ATMega8 dan
Driver motor ULN2804A ..................................................... 43
Gambar 22. Rangkaian Display jam, menit dan detik ............................. 44
Gambar 23. Rangkaian Driver Motor ULN2804A .................................. 45
Gambar 24. Rangkaian Driver Relay (pada kran) .................................... 46
xiv
DAFTAR TABEL
Halaman
Tabel 1. Fungsi Pin pada IC ULN2804A ………………………………. 25
Tabel 2. Karakteristik Regulator Tegangan Seri 78xx …………………. 27
Tabel 3. Simbol Diagram Alir …………………………………………. 31
Tabel 4. Daftar Komponen Pada Rangkaian Display Jam, Menit dan
Detik ........................................................................................... 45
Tabel 5. Data Hasil Pengujian Rangkaian Driver Motor ......................... 50
Tabel 6. Data Hasil Pengujian Rangkaian Driver Motor Kran ................ 50
Tabel 7. Data Hasil Pengujian Rangkaian Driver Motor Rel ................... 51
Tabel 8. Data Hasil Pengujian Untuk Jumah Pelet Yang Keluar dari
Kran ............................................................................................ 51
Tabel 9. Data Kesesuaian Antara Jam Yang Sesungguhnya dengan Jam
Pada Tampilan LCD ...................................................................52
Tabel 10. Data Hasil Pengujian Rangkaian Catu Daya ......................... 53
xv
BAB I
PENDAHULUAN
A. Latar Belakang
Ikan merupakan hewan yang banyak dipelihara orang dikolam atau tambak
serta dapat dijadikan sebagai mata pencaharian. Agar ikan dapat hidup dengan
sehat dan cepat pertumbuhannya maka memerlukan penanganan dan
perawatan yang baik. Penanganan dan perawatan ikan yang baik mencakup
pemberian makanan yang umumnya berupa pellet dengan teratur dan porsi
yang tepat, kondisi dan pergantian air yang baik, sirkulasi oksigen yang
lancar, kebersihan kolam dan sebagainya.
Salah satu hal yang terpenting dalam pemeliharaan ikan adalah pemberian
makanan bagi ikan tersebut, sebab ikan sebagai makhluk hidup tentunya
memerlukan makanan agar tetap hidup dengan sehat dan cepat
pertumbuhannya. Bagi pemilik ikan, terkadang keseharianya disibukkan
dengan kegiatan-kegiatan lain yang padat. Bahkan kepadatan aktivitas yang
lain tersebut dapat menyita waktu hingga berhari-hari. Keadaan ini
menyebabkan proses pemberian makanan kepada ikan menjadi terlantar dan
tidak sesuai dengan jadwal serta porsinya atau bahkan lupa hingga berhari-hari
tidak memberikan makanan kepada ikan. Kelalaian dalam memberikan
makanan kepada ikan dapat mengakibatkan ikan kekurangan gizi,
pertumbuhannya terhambat, kerdil, sakit dan bahkan bisa mengakibatkan
kematian. Apalagi jika yang dipelihara adalah ikan lele dumbo yang
memerlukan jadwal pemberian makanan yang pasti dan porsi makanan yang
2
mencukupi, keterlambatan pemberian makanan serta porsi makanan yang
kurang akan berdampak langsung pada penurunan bobot lele dumbo. Apabila
sampai terjadi kelalaian dalam pemberian makanan hingga berhari-hari, bisa
dipastikan badan lele menjadi kurus dengan kepala besar yang memerlukan
waktu yang relatif lama untuk menjadi besar dan gemuk kembali. Hal
demikian tentu saja sangat merugikan pemilik ikan, disampaing panennya
lebih lama, pembelian makanan lele menjadi bertambah yang tentu saja
memerlukan uang yang lebih banyak serta bobot ikan belum tentu memuaskan
(Sukir, 2007).
Untuk mengatasi permasalahan tersebut maka perlu dilakukan penelitian
rancang bangun pemberi makan ikan otomatis. Dengan prototype ini dapat
dilakukan pemberian makanan kepada ikan secara otomatis menyangkut
waktu atau jadwal pemberian makanan dan jumlah atau porsi makanan.
Disamping itu, dapat dilakukan pula pemerataan tebaran makanan serta
ketersediaan makanan yang terkontrol. Pemberi makan ikan otomatis ini
berbasis kendali mikrokontroller ATMega8535. Dengan demikian dapat
diharapkan ikan akan mendapatkan makanan secara teratur dengan jumlah
porsi yang mencukupi dan tidak berebut sehingga ikan dapat hidup dengan
sehat, cepat besar dan berbobot yang pada gilirannya panenan ikan akan
memuaskan.
3
B. Identifikasi Masalah
Berdasarkan latar belakang masalah yang telah dikemukakan di atas, maka
dalam pembuatan alat pemberi pakan ikan otomatis ini, dapat diidentifikasikan
beberapa permasalahan antara lain :
1. Pemilik tambak harus selalu memberi makan ikan sesuai dengan jadwal,
namun karena kesibukannya kadang tidak tersempatkan.
2. Kelalaian dalam memberi makan ikan dapat mengakibatkan ikan
kekurangan gizi, pertumbuhannya terhambat, kerdil, sakit, dan bahkan bisa
mengakibatkan kematian.
3. Perlu adanya alat pemberi makan ikan yang bekerja secara otomatis.
4. Perlu adanya basis kendali yang dipilih untuk pengendali pemberi makan
ikan tersebut.
C. Batasan Masalah
Mengingat keterbatasan waktu pengerjaan dan biaya yang ada, maka
penulis membatasi permasalahan sebagai berikut :
1. Penggunaan mikrokontroller ATMega8535 sebagai alat kendali motor
serta ATMega8 sebagai kendali jam digital .
2. Menggunakan motor DC power window .
3. Kerja otomatis dibatasi pada pengaturan jadwal pemberian makanan ikan
dan bobot pelet serta penambahan penunjukan jam.
4
D. Rumusan Masalah
Permasalahan yang diangkat dalam penulisan Tugas akhir adalah :
1. Bagaimanakah rancang bangun pemberi pakan ikan otomatis berbasis
mikrokontroller ATMega8535 ?
2. Bagaimanakah unjuk kerja prototype pemberi makan ikan otomatis
berbasis mikrokontroller ATMega8535 ?
E. Tujuan
Tujuan yang akan dicapai dalam penulisan Tugas Akhir ini adalah :
a. Membuat prototype pemberi makan ikan otomatis berbasis
mikrokontroller ATMega8535.
b. Mengetahui unjuk kerja prototype pemberi makan ikan otomatis berbasis
mikikontroller ATMega8535.
F. Manfaat
Pembuatan proyek akhir ini diharapkan mampu memberikan kontribusi
positif berupa manfaat kepada semua pihak yang dapat memanfaatkannya,
yaitu:
a. Penulis
1. Mengetahui prinsip kerja rangkaian dan mengetahui karakteristik dari
setiap komponen utama rangkaian
2. Sebagai sarana penelitian tentang perancangan sistem elektronik dan
pemrograman menggunakan mikrokontroller AVR .
5
b. Mahasiswa dan Lembaga Pendidikan
Menambah wawasan keilmuan dalam hal pemanfaatan teknologi
Mikrokontroller AVR, serta komponen lain ketika akan digunakan dalam
pembuatan pemberi pakan ikan otomatis, sehingga dapat memacu
kreatifitas dalam pengembangan rangkaian kendali berbasis
mikrokontroller AVR.
c. Bagi Masyarakat
Penelitian ini akan menghasilkan prototype pemberi makan ikan otomatis
berbasisi mikrokontroller ATMega8535 yang dapat dikembangkan untuk
penerapan di industri budidaya ikan seperti dikolam dan tambak dengan
harga yang murah. Bagi pemilik ikan, penggunaan prototype pemberi
makan ikan otomais berbasis mikrokontroller ATMega8535 ini dapat
meringankan beban dalam memberikan makanan kepada ikan karena dapat
bekerja secara otomatis. Disamping itu ikan akan mendapatkan porsi
makanan yang cukup, tidak berebut karena tebaran makanan merata dan
kontinyuitas makanan yang terkontrol sehingga ikan dapat hidup sehat
cepat besar dan berbobot yang pada gilirannya panenan ikan dapat
memuaskan.
6
G. Keaslian Gagasan
Pembuatan proyek akhir dengan judul “Pemberi Pakan Ikan Otomatis
Berbasis Mikrokontroller ATMega8535“ merupakan pengembangan dari alat
yang sudah ada, yaitu “ Pemberi Makan Ikan Otomatis Berbasis
Mikrokontroller AT89S52“.
BAB II
PENDEKATAN PEMECAHAN MASALAH
A. Pengertian Umum Mikrokontroller
1. Mikrokontroller ATMega8535
Perkembangan teknologi telah maju dengan pesat dalam perkembangan
dunia elektronika, khususnya dunia mikroelektronika. Penemuan silikon
menyebabkan bidang ini mampu memberikan sumbangan yang amat berharga
bagi perkembangan teknologi medern. Atmel sebagai salah satu vendor yang
mengembangkan dan memasarkan produk mikroelektronika telah menjadi
suatu teknologi standart bagi para desainer sistem elektronika masa kini.
Mikrokontroller merupakan bentuk minimum dari sebuah mikrokomputer,
ada perangkat kerasnya dan ada perangkat lunaknya serta juga ada memori,
CPU, RAM, ROM dan lain sebagainya yang terintegrasi dalam keping IC.
Chip mikrokontroler ini dapat diprogram menggunakan port pararel atau
serial. Selain itu, dapat beroperasi hanya dengan 1 chip dan beberapa
komponen dasar seperti kristal, resistor, dan kapasitor. Mikrokontroller
umumnya bekerja pada frekwensi sekitar 12 MHz hingga 40 MHz.
Mikrokontroller AVR (ATMega8535) memiliki arsitektur RISC8 bit,
dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar
instruksi dieksekusi dalam 1(satu) sikuls clock, berbeda dengan instruksi
MCSI yang membutuhkan 12 siklus clock.
8
ATMega8535 mempunyai kelebihan yaitu mempunyai flash memori
sebesar 8K byte dengan kemampuan Read While Write, SRAM sebesar 512
byte, dan EEPROM sebesar 512 byte, selain itu juga ATMega8535 ini juga
memiliki system mikroprosesor 8 bit berbasis RISC dengan kecepatan
maksimal 16 MHz, serta enam pilihan mode sleep mengehemat penggunaan
daya listrik.
Mikrokontroller ATMega8535 memiliki beberapa spesifikasi, antara lain :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tegangan kerja 4-5.0 V.
4. Bekerja dengan rentang 0-33 MHz.
5. Tiga buah Timer/Counter dengan kemampuan perbadingan.
6. CPU yang terdiri atas 32 buah register.
7. Watchdog timer dengan osilator internal.
8. SRAM sebesar 512 byte.
9. Memori flash sebesar 8 Kb dengan kemampuan Read While Write.
10. Unit interupsi internal dan eksternal.
11. Port antarmuka SPI
12. EEPROM sebesar 512 byte yang dapat deprogram saat operasi.
13. Antarmuka komparator analog.
14. Port USART untuk komunikasi serial.
9
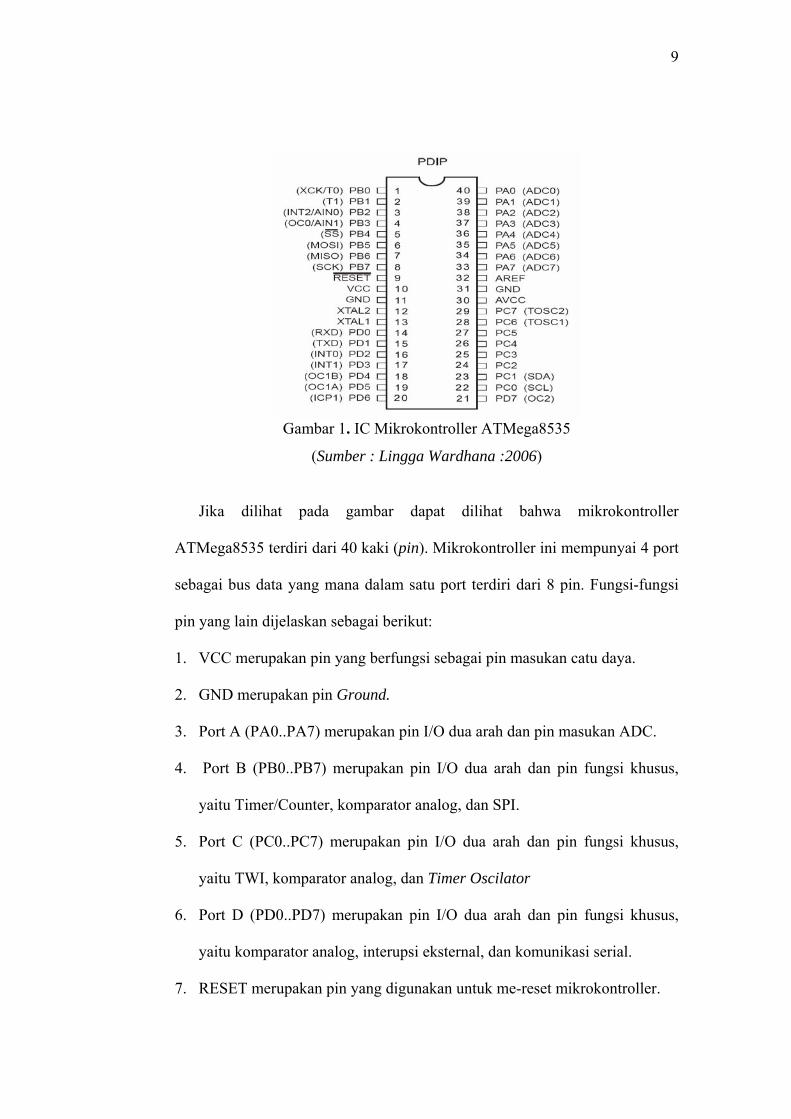
Gambar 1. IC Mikrokontroller ATMega8535
(Sumber : Lingga Wardhana :2006)
Jika dilihat pada gambar dapat dilihat bahwa mikrokontroller
ATMega8535 terdiri dari 40 kaki (pin). Mikrokontroller ini mempunyai 4 port
sebagai bus data yang mana dalam satu port terdiri dari 8 pin. Fungsi-fungsi
pin yang lain dijelaskan sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin Ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu Timer/Counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu TWI, komparator analog, dan Timer Oscilator
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu komparator analog, interupsi eksternal, dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroller.
10
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan referensi ADC.
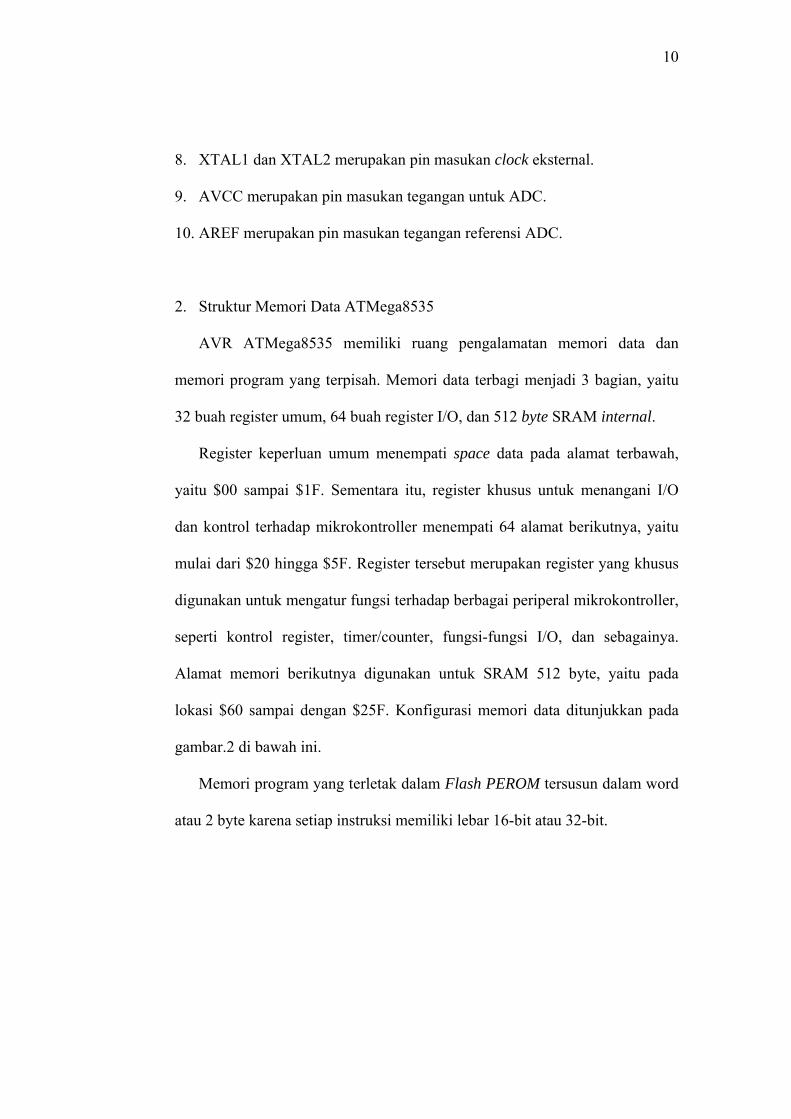
2. Struktur Memori Data ATMega8535
AVR ATMega8535 memiliki ruang pengalamatan memori data dan
memori program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu
32 buah register umum, 64 buah register I/O, dan 512 byte SRAM internal.
Register keperluan umum menempati space data pada alamat terbawah,
yaitu $00 sampai $1F. Sementara itu, register khusus untuk menangani I/O
dan kontrol terhadap mikrokontroller menempati 64 alamat berikutnya, yaitu
mulai dari $20 hingga $5F. Register tersebut merupakan register yang khusus
digunakan untuk mengatur fungsi terhadap berbagai periperal mikrokontroller,
seperti kontrol register, timer/counter, fungsi-fungsi I/O, dan sebagainya.
Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada
lokasi $60 sampai dengan $25F. Konfigurasi memori data ditunjukkan pada
gambar.2 di bawah ini.
Memori program yang terletak dalam Flash PEROM tersusun dalam word
atau 2 byte karena setiap instruksi memiliki lebar 16-bit atau 32-bit.
11
Register Umum Alamat R0 R1 ....
R30 R31
$0000 $0001 ......... $001E $001F
Register Umum Alamat R0 R1 ....
R30 R31
$0000 $0001 ......... $001E $001F
SRAM INTERNAL $0060 $0061 ......... $025E $025F(RAMEND)
Gambar 2. Konfigurasi Memori Data AVR ATMega8535
(Sumber : Lingga Wardhana :2006)
ATMega8535 memiliki 4KbyteX16-bit Flash PEROM dengan alamat
mulai dari $000 sampai $FFF. AVR tersebut memiliki 12-bit Program
Counter (PC) sehingga mampu mengalamatkan isi Flash. Selain itu, AVR
ATMega juga memiliki memori data berupa EEPROM 8-bit sebanyak 512
byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
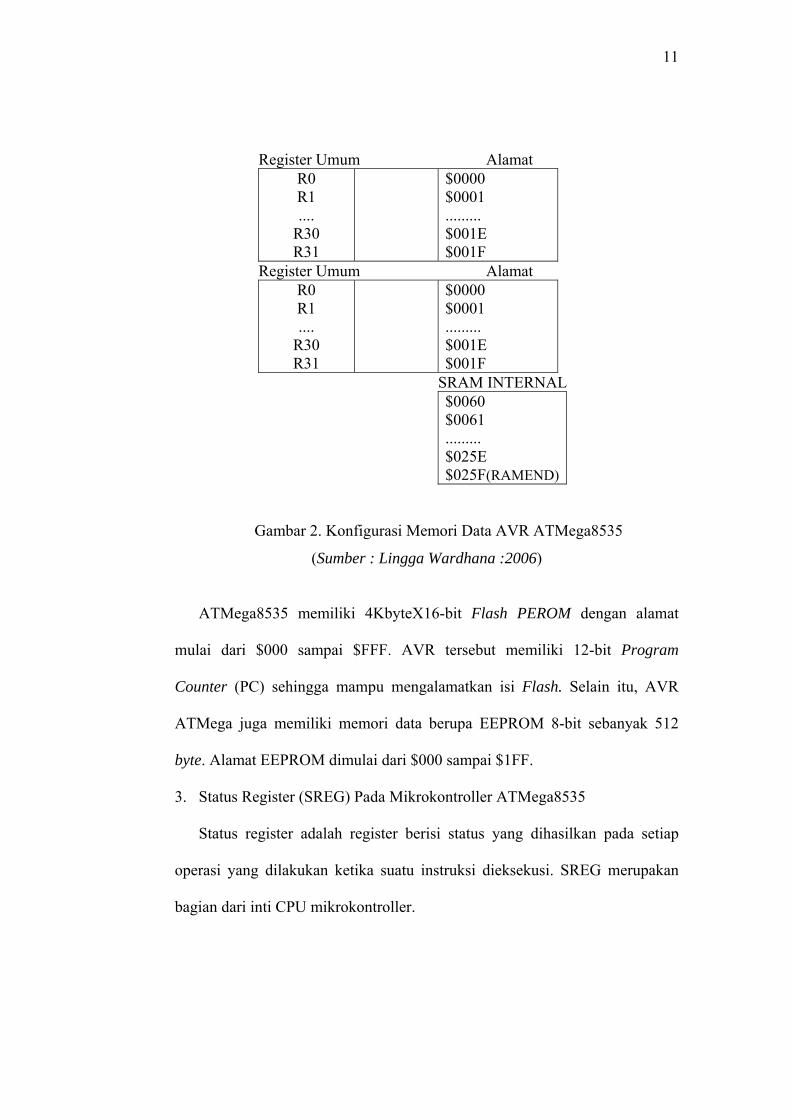
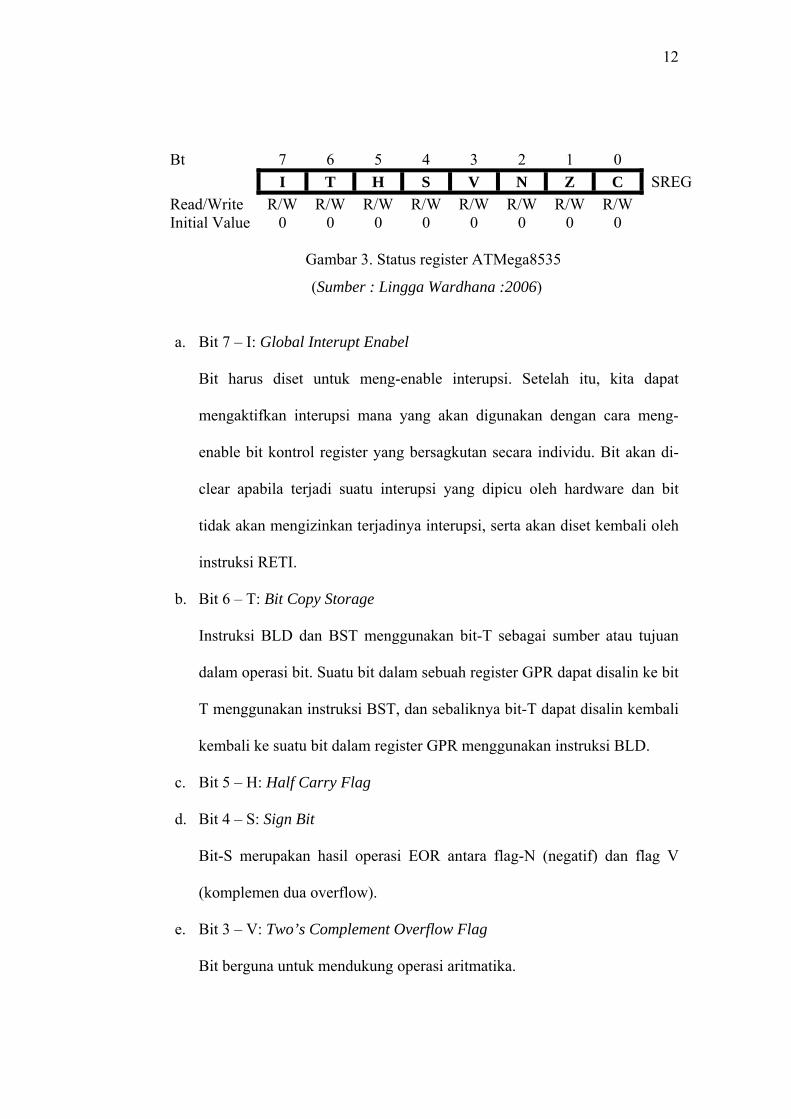
3. Status Register (SREG) Pada Mikrokontroller ATMega8535
Status register adalah register berisi status yang dihasilkan pada setiap
operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan
bagian dari inti CPU mikrokontroller.
12
Bt 7 6 5 4 3 2 1 0 I T H S V N Z C SREG Read/Write R/W R/W R/W R/W R/W R/W R/W R/W Initial Value 0 0 0 0 0 0 0 0
Gambar 3. Status register ATMega8535
(Sumber : Lingga Wardhana :2006)
a. Bit 7 – I: Global Interupt Enabel
Bit harus diset untuk meng-enable interupsi. Setelah itu, kita dapat
mengaktifkan interupsi mana yang akan digunakan dengan cara meng-
enable bit kontrol register yang bersagkutan secara individu. Bit akan di-
clear apabila terjadi suatu interupsi yang dipicu oleh hardware dan bit
tidak akan mengizinkan terjadinya interupsi, serta akan diset kembali oleh
instruksi RETI.
b. Bit 6 – T: Bit Copy Storage
Instruksi BLD dan BST menggunakan bit-T sebagai sumber atau tujuan
dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit
T menggunakan instruksi BST, dan sebaliknya bit-T dapat disalin kembali
kembali ke suatu bit dalam register GPR menggunakan instruksi BLD.
c. Bit 5 – H: Half Carry Flag
d. Bit 4 – S: Sign Bit
Bit-S merupakan hasil operasi EOR antara flag-N (negatif) dan flag V
(komplemen dua overflow).
e. Bit 3 – V: Two’s Complement Overflow Flag
Bit berguna untuk mendukung operasi aritmatika.
13
f. Bit 2 – N : Negative Flag
Apabila suatu operasi menghasilkan suatu bilangan negatif, maka flag-N
akan diset.
g. Bit 1 – Z: Zero Flag
Bit akan diset bila hasil operasi yang diperoleh adalah nol.
h. Bit 0 – C: Carry Flag
Apabila suatu operasi menghasilkan carry, maka bit akan diset.
B. ATMega8
ATMega8 merupakan mikrokontroller 8 bit CMOS berdaya rendah
berbasis AVR (Alf and Vegard’s RISC processor) yang mempunyai arsitektur
RISC (Reduce Instruction Set Computer). Arsitektur ini mempunyai
kemampuan mengeksekusi perintah hanya dalam satu siklus detak osilator
dengan kecepatan mendekati 1 MIPS (Million Instruction Per Second) per
MHz. Mikrokontroller ATMega8 memiliki fasilitas antara lain sebagai
berikut,
1. Memori flash sebesar 8 kb dengan kemampuan Read While Write.
2. Saluran I/O sebanyak 23 unit.
3. CPU yang terdiri atas 32 unit register.
4. Tiga unit Timer/Counter.
5. ADC sebanyak 6 saluran.
AVR menggunakan arsitektur harvard dengan memori dan bus untuk
program dan data yang terpisah. Instruksi dalam memori program dieksekusi
14
dengan a single level pipelining. Pada saat sebuah intruksi sedang dieksekusi,
instruksi berikutnya langsung diambil dari memori program. Konsep ini
membiarkan instruksi dieksekusi setiap pewaktuan detak. Memori program
merupakan flash memori yang bisa diprogram dalam sistem ISP (In-System
Programing).
Register berkas yang bisa diakses dengan cepat berisi 32x8 bit register
kegunaan umum dengan waktu akses satu pewaktuan detak. Sehingga bisa
melakukan operasi ALU (Arithmetic Logic Unit) dalam satu pewaktuan detak.
Dalam operasi ALU, dari register berkas dikeluarkan dua operan, dilakukan
eksekusi operasi, dan hasilnya disimpan kembali dalam register berkas dalam
satu pewaktuan detak. Dari 32 register yang ada, terdapat enam unit register
yang dapat digunakan untuk pengalamatan tidak langsung 16 bit sebagai
register pointer. Register tersebut memiliki nama khusus, yaitu register X,
register Y, dan register Z. ALU mendukung operasi aritmetik dan logik antara
register atau antara konstanta dan register. Operasi satu register dapat juga
dieksekusi pada ALU. Status register diperbaharui untuk melihat informasi
hasil operasi setelah mengoperasikan sebuah operasi aritmetik. Aliran program
menyediakan loncatan bersyarat dan loncatan tidak bersyarat dan instruksi
CALL, mampu mengalamatkan langsung seluruh lokasi alamat. Kebanyakan
instruksi AVR berformat 16 bit. Setiap alamat memori program berisi 16 – 32
bit instruksi.
Memori flash program terbagi atas dua bagian, bagian boot program dan
bagian program aplikasi. Kedua bagian menggunakan lock bit untuk menulis
15
(write) dan proteksi baca/tulis. Intruksi LPM (Load Program Memory) akan
dituliskan kedalam bagian memori aplikasi flash yang terletak di dalam bagian
boot program. Inti AVR mengkombinasikan banyak set instruksi dengan 32
register keperluan umum. Semua register tersebut terhubung langsung ke
ALU, memperbolehkan 2 register bebas yang dapat diakses oleh satu instuksi
dalam satu putaran waktu. Dengan arsitektur ini penggunaan code akan lebih
efisien, sehingga mendapatkan keluaran sekitar 10 kali lebih cepat
dibandingkan dengan mikrokontroller CISC (Complex Instruction Set
Computer) konvensional.
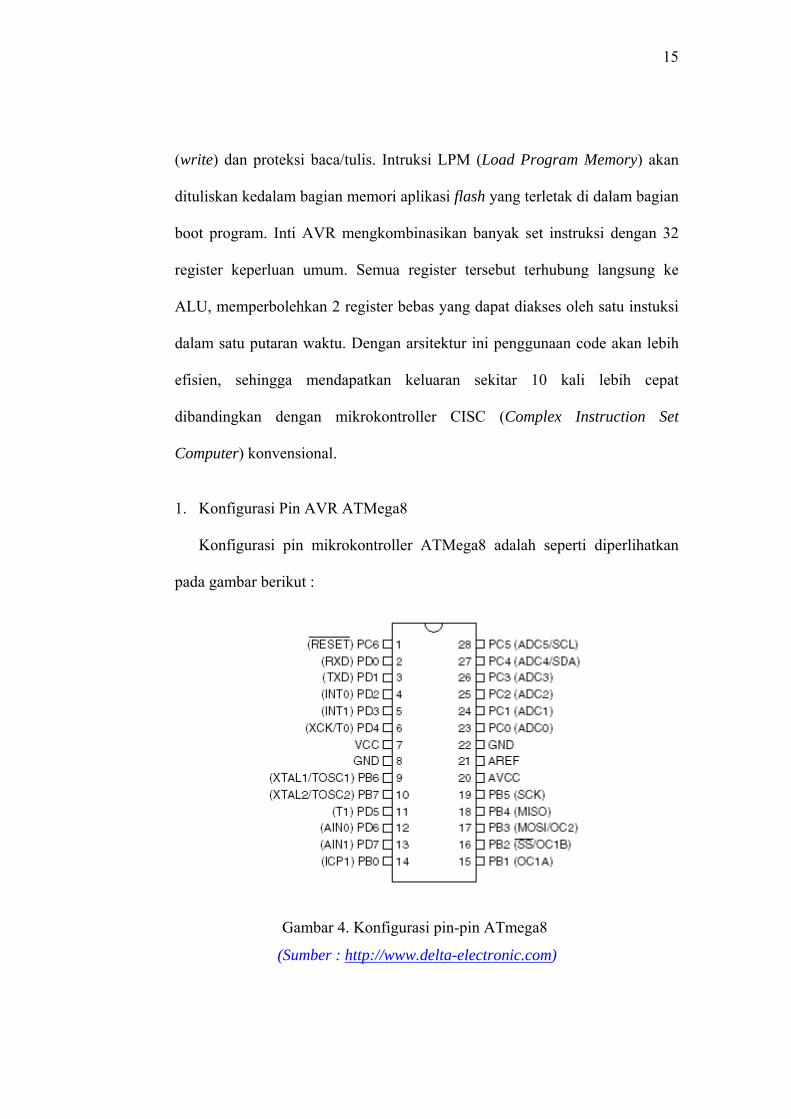
1. Konfigurasi Pin AVR ATMega8
Konfigurasi pin mikrokontroller ATMega8 adalah seperti diperlihatkan
pada gambar berikut :
Gambar 4. Konfigurasi pin-pin ATmega8
(Sumber : http://www.delta-electronic.com)
16
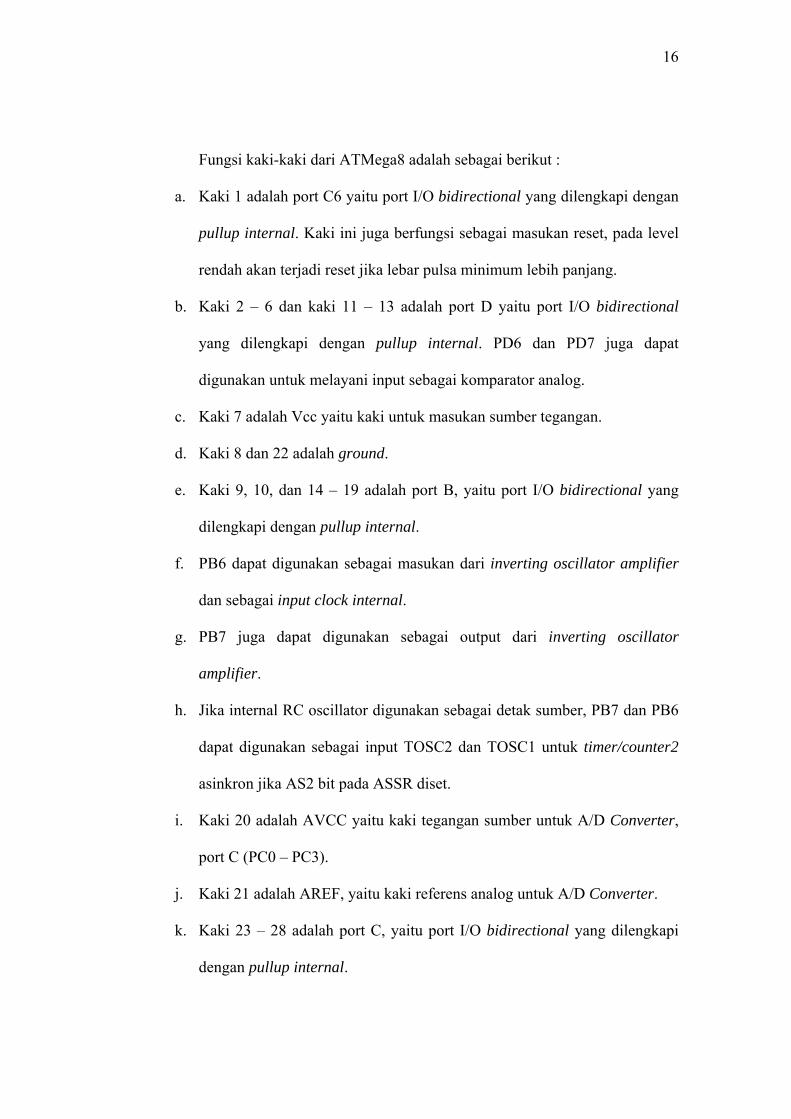
Fungsi kaki-kaki dari ATMega8 adalah sebagai berikut :
a. Kaki 1 adalah port C6 yaitu port I/O bidirectional yang dilengkapi dengan
pullup internal. Kaki ini juga berfungsi sebagai masukan reset, pada level
rendah akan terjadi reset jika lebar pulsa minimum lebih panjang.
b. Kaki 2 – 6 dan kaki 11 – 13 adalah port D yaitu port I/O bidirectional
yang dilengkapi dengan pullup internal. PD6 dan PD7 juga dapat
digunakan untuk melayani input sebagai komparator analog.
c. Kaki 7 adalah Vcc yaitu kaki untuk masukan sumber tegangan.
d. Kaki 8 dan 22 adalah ground.
e. Kaki 9, 10, dan 14 – 19 adalah port B, yaitu port I/O bidirectional yang
dilengkapi dengan pullup internal.
f. PB6 dapat digunakan sebagai masukan dari inverting oscillator amplifier
dan sebagai input clock internal.
g. PB7 juga dapat digunakan sebagai output dari inverting oscillator
amplifier.
h. Jika internal RC oscillator digunakan sebagai detak sumber, PB7 dan PB6
dapat digunakan sebagai input TOSC2 dan TOSC1 untuk timer/counter2
asinkron jika AS2 bit pada ASSR diset.
i. Kaki 20 adalah AVCC yaitu kaki tegangan sumber untuk A/D Converter,
port C (PC0 – PC3).
j. Kaki 21 adalah AREF, yaitu kaki referens analog untuk A/D Converter.
k. Kaki 23 – 28 adalah port C, yaitu port I/O bidirectional yang dilengkapi
dengan pullup internal.
17
2. Stack Pointer
Stack pointer merupakan suatu bagian dari AVR yang berguna untuk
menyimpan data sementara, variabel lokal, dan alamat kembali dari suatu
interupsi ataupun subrutin. Stack pointer diwujudkan sebagai dua unit register,
yaitu SPH dan SPL. Saat awal maka SPH dan SPL akan bernilai 0, sehingga
perlu diinisialisasi terlebih dahulu jika diperlukan.
3. Timer AVR ATMega8
AVR ATMega8 memiliki tiga buah pewaktu yaitu Timer/Counter 0,
Timer/Counter 1, Timer/Counter 2. Penjelasan masing-masing Timer/Counter
adalah sebagai berikut :
a. Timer/Counter 0
Timer/Counter 0 adalah 8 bit Timer/Counter yang multifungsi. Deskripsi
untuk Timer/Counter 0 pada ATMega8 adalah sebagai berikut:
1) Sebagai counter 1 kanal
2) Pembangkit frekuensi (Frekuensi generator)
3) Prescaler 10 bit untuk timer
b. Timer/Counter 1
Timer/Counter 1 adalah 16-bit Timer/Counter yang memungkinkan
program pewaktuan lebih akurat. Berbagai fitur dari Timer/Counter 1
adalah:
1) Desain 16 bit (juga memungkinkan 16 bit PWM)
2) Dua unit compare
18
3) Dua unit register pembanding
4) Satu unit input capture unit
5) Timer dinolkan saat match compare (autoreload)
6) Dapat menghasilkan gelombang PWM dengan glitch-free
7) Periode PWM yang dapat diubah-ubah
8) Pembangkit frekuensi
9) Empat buah sumber interupsi (TOV1, OCF1A, OCF1B dan ICF1)
c. Timer/Counter 2
Timer/Counter 2 adalah 8 bit Timer/Counter yang multifungsi. Deskripsi
untuk Timer/Counter 2 pada ATMega8 adalah sebagai berikut:
1) Sebagai counter 1 kanal
2) Pewaktuan dinolkan saat proses perbandingan tercapai (auto
reload)
3) Dapat mengahasilkan gelombang PWM dengan glitch-free
4) Pembangkit frekuensi (Frekuensi generator)
5) Prescaler 10 bit untuk pewaktuan
6) Intrupsi pewaktu yang disebabkan timer overflow dan match
compare
C. LCD
Display atau peraga merupakan alat yang berguna untuk menyajikan
informasi tentang hal keadaan atau kondisi perangkat yang sedang diuji. LCD
dibuat dengan teknologi CMOS logic. LCD tidak menghasilkan cahaya tetapi
19
memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau
mentransmisikan cahaya dari versi back-lit.
LCD adalah lapisan dari campuran organik antara lapisan kaca bening
dengan elektroda transparan indium oksida dalam bentuk tampilan seven-
segment dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan
dengan medan tegangan, molekul organik yang panjang dan silindris
menyesuaikan diri dengan elektroda dari segmen. Lapisan sandwich memiliki
polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang
diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat
melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang
diaktifkan terlihat gelap.
Pada dasarnya LCD dioperasikan dengan tegangan rendah (tipikal 3-15
Vrms), frekuensi rendah (25 Hz hingga 60 Hz) sinyal AC dan membutuhkan
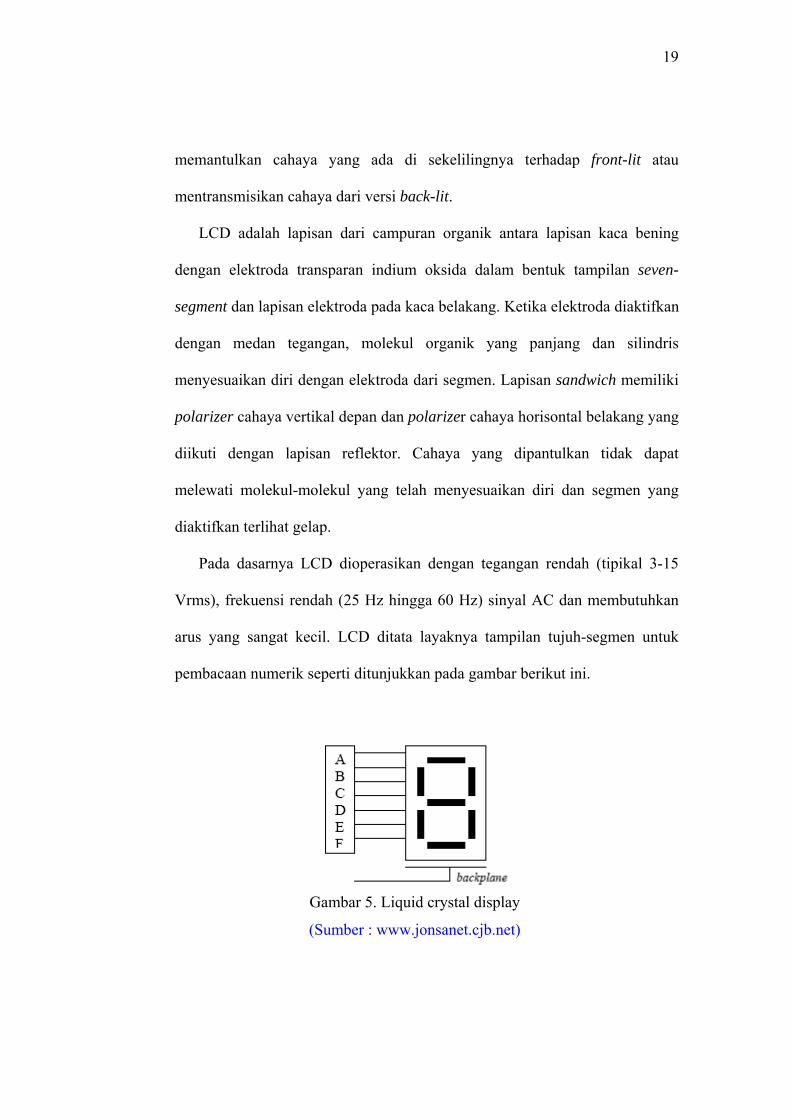
arus yang sangat kecil. LCD ditata layaknya tampilan tujuh-segmen untuk
pembacaan numerik seperti ditunjukkan pada gambar berikut ini.
Gambar 5. Liquid crystal display
(Sumber : www.jonsanet.cjb.net)
20
Tegangan AC dibutuhkan untuk menyalakan sebuah segmen yang
diterapkan antara segmen dan backplane. LCD membutuhkan arus yang
sangat kecil dibandingkan dengan penggunaan LED dan secara luas LCD
digunakan pada peralatan yang menggunakan catu daya baterai seperti
kalkulator dan arloji. Segmen LCD akan menyala ketika sebuah tegangan AC
diterapkan pada sebuah segmen dan backplane, dan akan padam ketika tidak
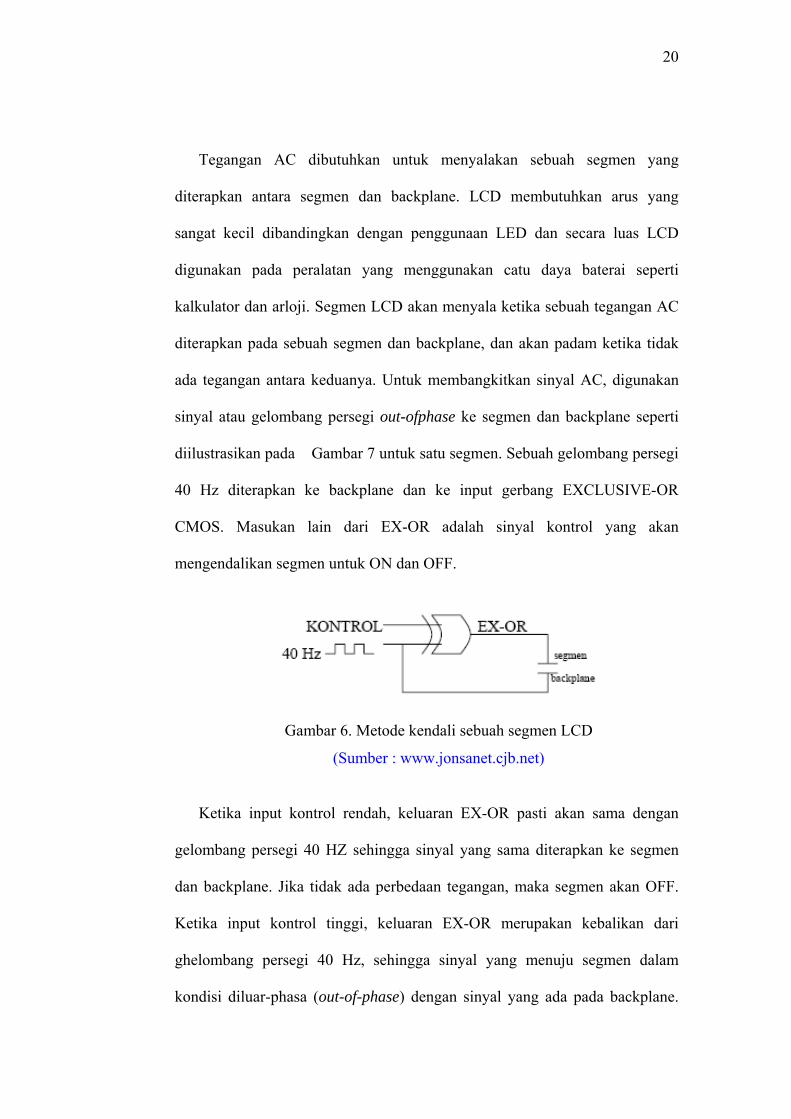
ada tegangan antara keduanya. Untuk membangkitkan sinyal AC, digunakan
sinyal atau gelombang persegi out-ofphase ke segmen dan backplane seperti
diilustrasikan pada Gambar 7 untuk satu segmen. Sebuah gelombang persegi
40 Hz diterapkan ke backplane dan ke input gerbang EXCLUSIVE-OR
CMOS. Masukan lain dari EX-OR adalah sinyal kontrol yang akan
mengendalikan segmen untuk ON dan OFF.
Gambar 6. Metode kendali sebuah segmen LCD
(Sumber : www.jonsanet.cjb.net)
Ketika input kontrol rendah, keluaran EX-OR pasti akan sama dengan
gelombang persegi 40 HZ sehingga sinyal yang sama diterapkan ke segmen
dan backplane. Jika tidak ada perbedaan tegangan, maka segmen akan OFF.
Ketika input kontrol tinggi, keluaran EX-OR merupakan kebalikan dari
ghelombang persegi 40 Hz, sehingga sinyal yang menuju segmen dalam
kondisi diluar-phasa (out-of-phase) dengan sinyal yang ada pada backplane.
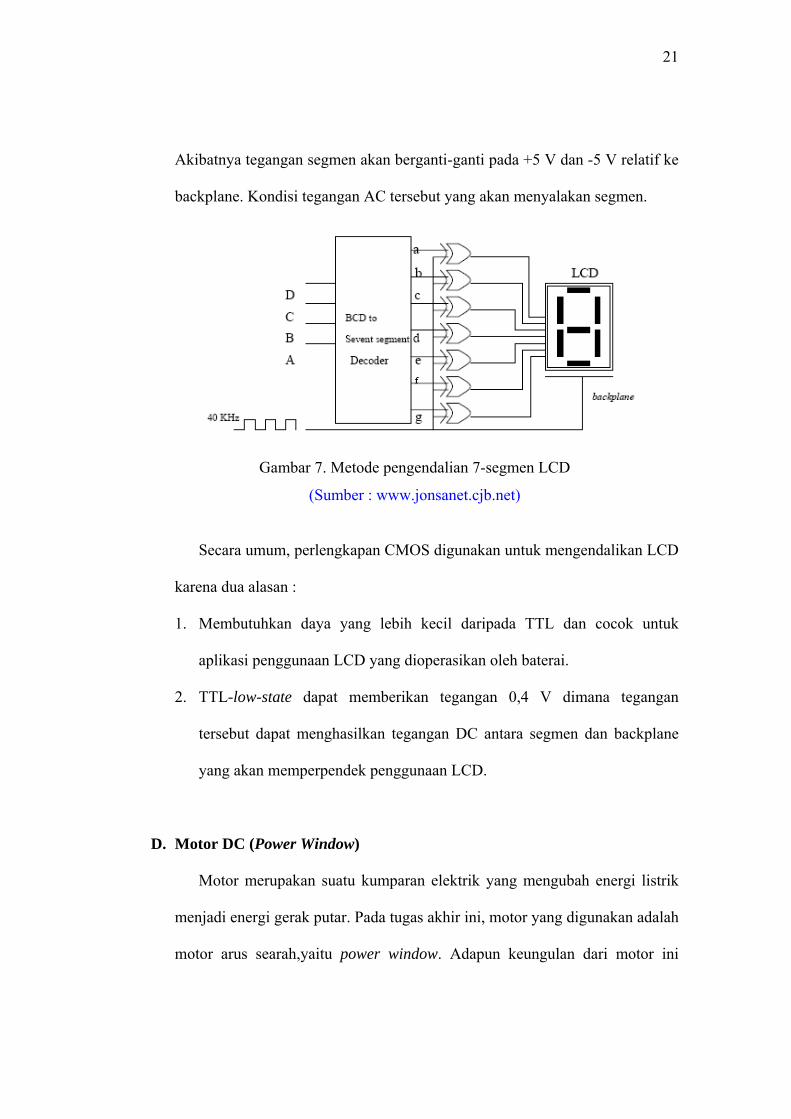
21
Akibatnya tegangan segmen akan berganti-ganti pada +5 V dan -5 V relatif ke
backplane. Kondisi tegangan AC tersebut yang akan menyalakan segmen.
Gambar 7. Metode pengendalian 7-segmen LCD
(Sumber : www.jonsanet.cjb.net)
Secara umum, perlengkapan CMOS digunakan untuk mengendalikan LCD
karena dua alasan :
1. Membutuhkan daya yang lebih kecil daripada TTL dan cocok untuk
aplikasi penggunaan LCD yang dioperasikan oleh baterai.
2. TTL-low-state dapat memberikan tegangan 0,4 V dimana tegangan
tersebut dapat menghasilkan tegangan DC antara segmen dan backplane
yang akan memperpendek penggunaan LCD.
D. Motor DC (Power Window)
Motor merupakan suatu kumparan elektrik yang mengubah energi listrik
menjadi energi gerak putar. Pada tugas akhir ini, motor yang digunakan adalah
motor arus searah,yaitu power window. Adapun keungulan dari motor ini
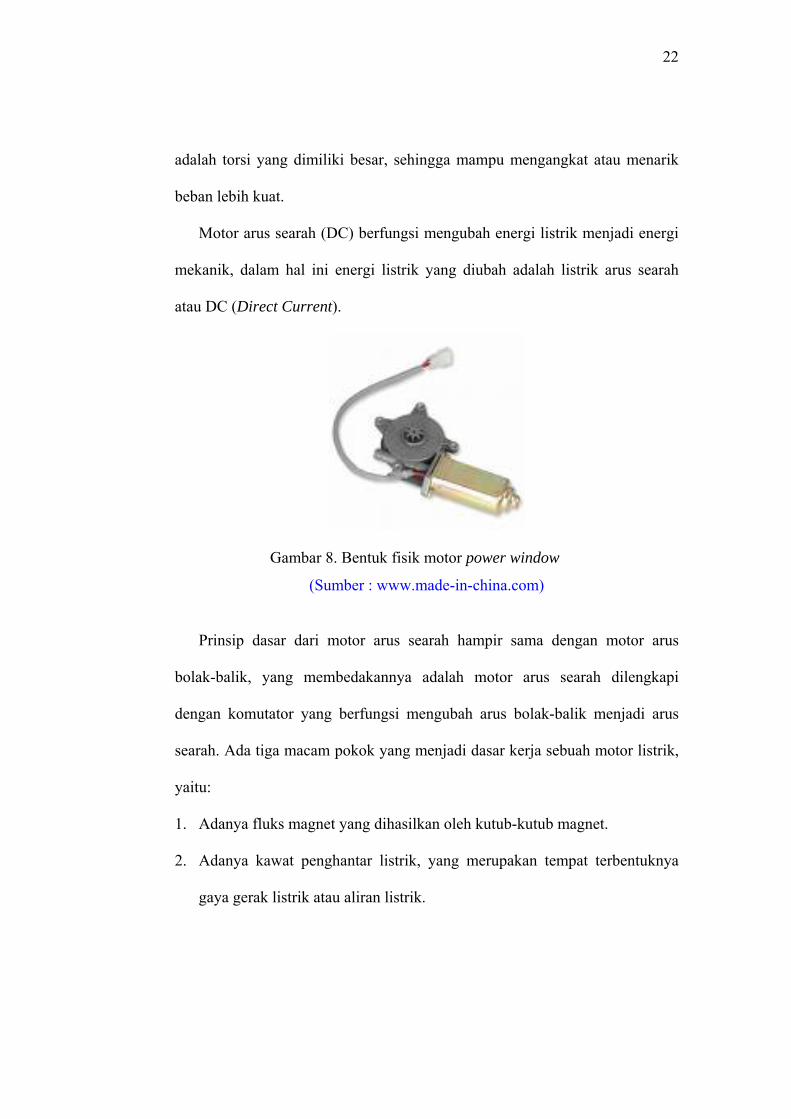
22
adalah torsi yang dimiliki besar, sehingga mampu mengangkat atau menarik
beban lebih kuat.
Motor arus searah (DC) berfungsi mengubah energi listrik menjadi energi
mekanik, dalam hal ini energi listrik yang diubah adalah listrik arus searah
atau DC (Direct Current).
Gambar 8. Bentuk fisik motor power window
(Sumber : www.made-in-china.com)
Prinsip dasar dari motor arus searah hampir sama dengan motor arus
bolak-balik, yang membedakannya adalah motor arus searah dilengkapi
dengan komutator yang berfungsi mengubah arus bolak-balik menjadi arus
searah. Ada tiga macam pokok yang menjadi dasar kerja sebuah motor listrik,
yaitu:
1. Adanya fluks magnet yang dihasilkan oleh kutub-kutub magnet.
2. Adanya kawat penghantar listrik, yang merupakan tempat terbentuknya
gaya gerak listrik atau aliran listrik.
23
3. Gerakan relatif antara fluks dengan kawat penghantar listrik, dalam hal ini
boleh fluks magnetnya tetap, sedangkan kawat penghantarnya yang
bergerak atau sebaliknya.
Prinsip kerja motor DC adalah ketika arus listrik (I) mengalir melewati
kumparan di dalam medan magnet (B) yang akan menghasilkan gaya
magnetnya (F) dalam hal ini adalah gaya Lorentz, sepanjang kawat tersebut
(L).
Gaya magnet tersebut dapat dihitung dengan persamaan :
BILF = (1)
Faktor-faktor yang harus diperhatikan dalam mentukan penilaian dari
performa sebuah motor dan pengaruh kecocokannya sebagai penggerak
diantaranya adalah daya, torsi dan kecepatan. Kecepatan putar motor DC (N)
dapat dirumuskan dengan persamaan di bawah ini :
φkRIV
N AATM −= (2)
Dimana : N = Kecepatan Motor
VTM = Tegangan Terminal
IA = Arus Jangka
RA = Hambatan Jangkar
k = Konstanta Motor
Φ = Fluks Magnet
Motor listrik DC tersusun dari dua bagian yaitu bagian diam (stator) dan
bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau
kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar
24
lilitannya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada
dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut
kumparan.
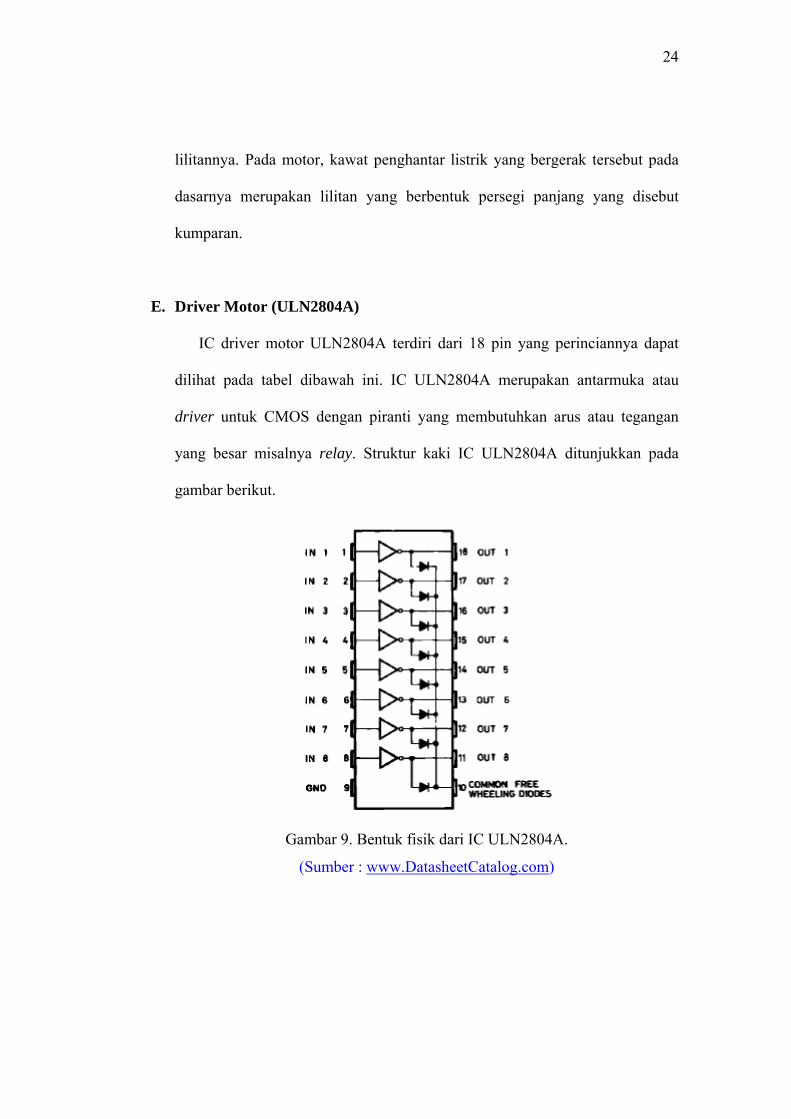
E. Driver Motor (ULN2804A)
IC driver motor ULN2804A terdiri dari 18 pin yang perinciannya dapat
dilihat pada tabel dibawah ini. IC ULN2804A merupakan antarmuka atau
driver untuk CMOS dengan piranti yang membutuhkan arus atau tegangan
yang besar misalnya relay. Struktur kaki IC ULN2804A ditunjukkan pada
gambar berikut.
Gambar 9. Bentuk fisik dari IC ULN2804A.
(Sumber : www.DatasheetCatalog.com)
25
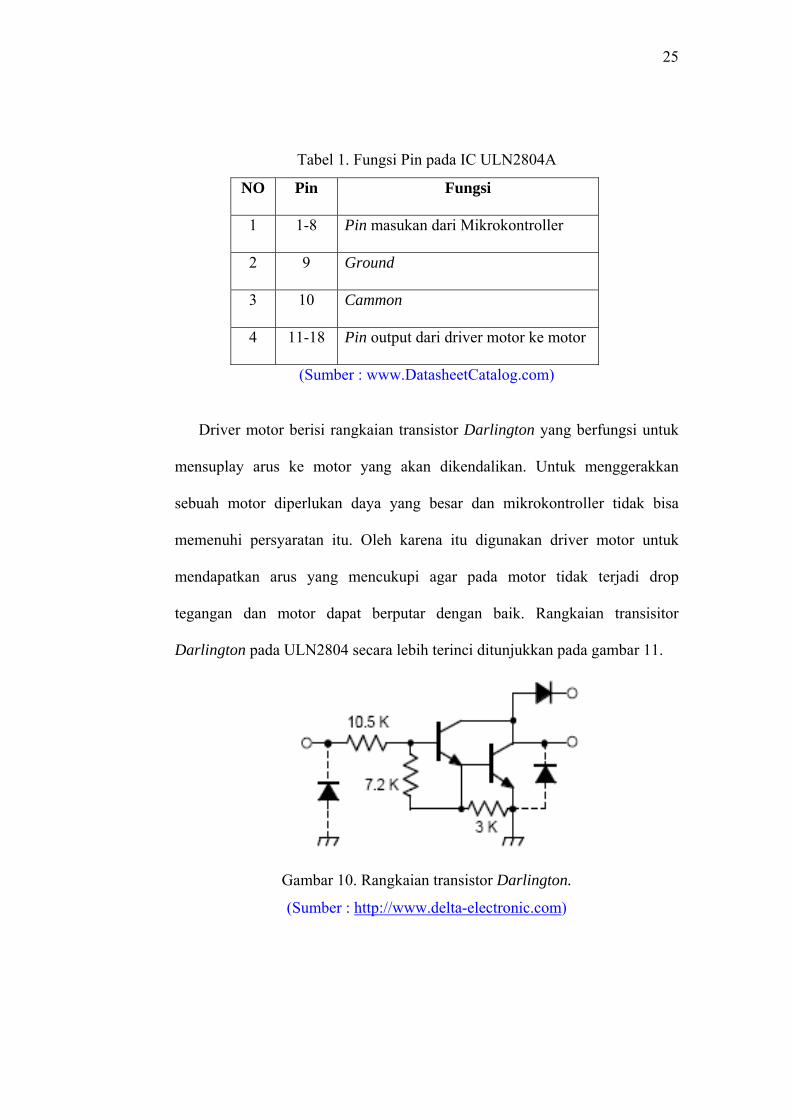
Tabel 1. Fungsi Pin pada IC ULN2804A
NO Pin Fungsi
1 1-8 Pin masukan dari Mikrokontroller
2 9 Ground
3 10 Cammon
4 11-18 Pin output dari driver motor ke motor
(Sumber : www.DatasheetCatalog.com)
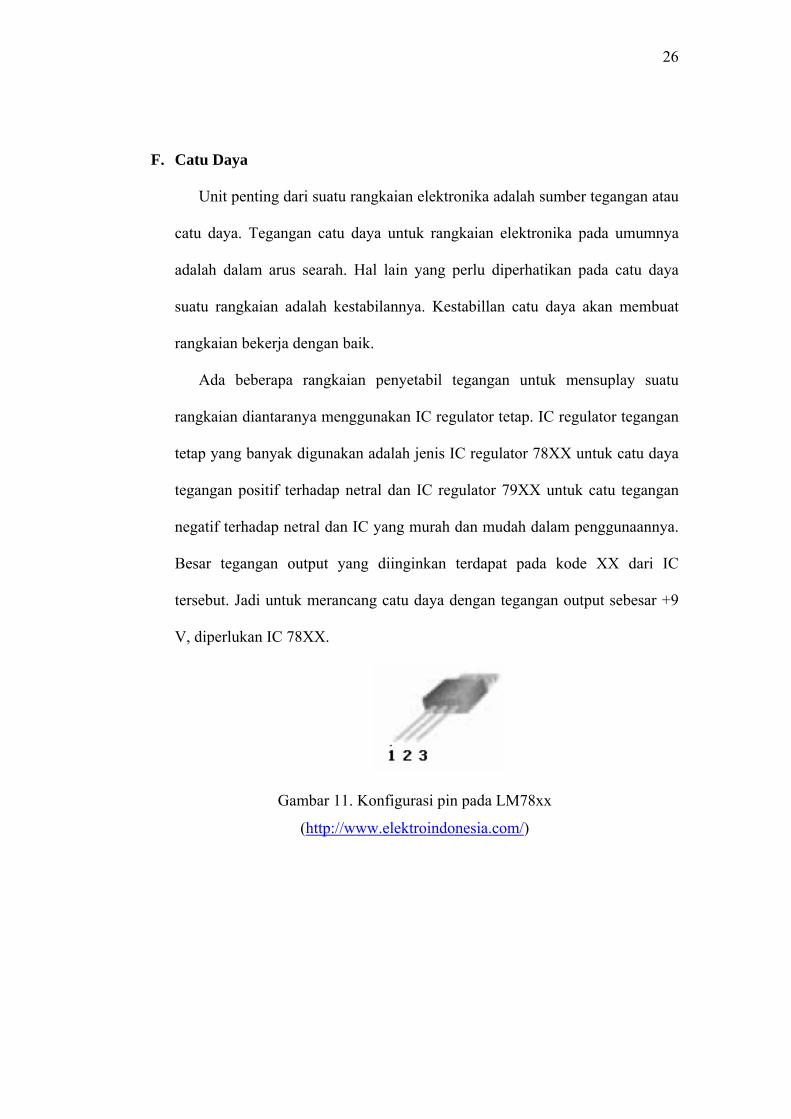
Driver motor berisi rangkaian transistor Darlington yang berfungsi untuk
mensuplay arus ke motor yang akan dikendalikan. Untuk menggerakkan
sebuah motor diperlukan daya yang besar dan mikrokontroller tidak bisa
memenuhi persyaratan itu. Oleh karena itu digunakan driver motor untuk
mendapatkan arus yang mencukupi agar pada motor tidak terjadi drop
tegangan dan motor dapat berputar dengan baik. Rangkaian transisitor
Darlington pada ULN2804 secara lebih terinci ditunjukkan pada gambar 11.
Gambar 10. Rangkaian transistor Darlington.
(Sumber : http://www.delta-electronic.com)
26
F. Catu Daya
Unit penting dari suatu rangkaian elektronika adalah sumber tegangan atau
catu daya. Tegangan catu daya untuk rangkaian elektronika pada umumnya
adalah dalam arus searah. Hal lain yang perlu diperhatikan pada catu daya
suatu rangkaian adalah kestabilannya. Kestabillan catu daya akan membuat
rangkaian bekerja dengan baik.
Ada beberapa rangkaian penyetabil tegangan untuk mensuplay suatu
rangkaian diantaranya menggunakan IC regulator tetap. IC regulator tegangan
tetap yang banyak digunakan adalah jenis IC regulator 78XX untuk catu daya
tegangan positif terhadap netral dan IC regulator 79XX untuk catu tegangan
negatif terhadap netral dan IC yang murah dan mudah dalam penggunaannya.
Besar tegangan output yang diinginkan terdapat pada kode XX dari IC
tersebut. Jadi untuk merancang catu daya dengan tegangan output sebesar +9
V, diperlukan IC 78XX.
Gambar 11. Konfigurasi pin pada LM78xx
(http://www.elektroindonesia.com/)
27
Tabel 2. Karakteristik Regulator Tegangan Seri 78xx
I out (A) Vin (V) Tipe
Vout
(Volt) 78Cxx 78Lxx 78Mxx Min Max
7805 5 1 0.1 0.5 7.5 20
7812 12 1 0.1 0.5 18 30
Untuk mendapatkan catu daya tegangan yang kita inginkan maka perlu
komponen-komponen yang lain. Dari tegangan jaringan 220 V diturunkan
dengan menggunakan transformator CT Steep Down ke nilai tertentu sesuai
yang diperlukan. Kemudian tegangan bolak-balik yang disearahkan oleh
penyearah yaitu berupa dioda, selanjutnya diratakan oleh kapasitor. Nilai
kapasitor tergantung pada besar kecilnya arus yang akan dikeluarkan. Selain
itu pemasangan kapasitor tersebut bertujuan untuk menghilangkan
ripple/kerut. Tegangan ini kemudian distabilkan oleh IC pada nilai yang
diinginkan. Kemudian ditambahkan transistor yang dipasang seri sebagai
penguat dan kapasitor untuk penghalus keluaran.
G. Relay
Relay merupakan rangkaian yang bersifat elektronis sederhana dan
tersusun oleh saklar, medan elektromagnet (kawat koil), dan poros besi.
Fungsi dari relay yaitu untuk memutuskan atau menghubungkan suatu
rangkaian elektronika yang satu dengan rangkaian elektronika yang lainnya
atau merupakan jenis saklar elektromagnetik yang memiliki beberapa
28
parameter penting yaitu rating tegangan, tegangan operasi (maksimal dan
minimal), tahanan gulungan, tipe dan arus kontaknya.
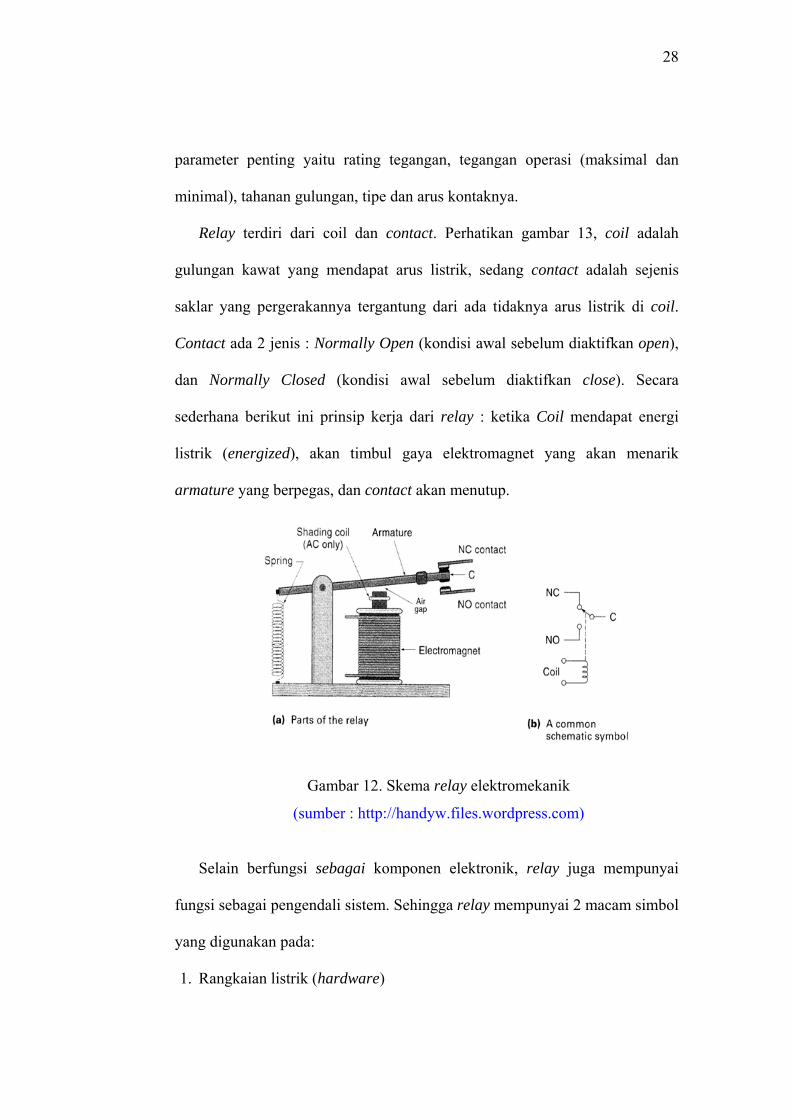
Relay terdiri dari coil dan contact. Perhatikan gambar 13, coil adalah
gulungan kawat yang mendapat arus listrik, sedang contact adalah sejenis
saklar yang pergerakannya tergantung dari ada tidaknya arus listrik di coil.
Contact ada 2 jenis : Normally Open (kondisi awal sebelum diaktifkan open),
dan Normally Closed (kondisi awal sebelum diaktifkan close). Secara
sederhana berikut ini prinsip kerja dari relay : ketika Coil mendapat energi
listrik (energized), akan timbul gaya elektromagnet yang akan menarik
armature yang berpegas, dan contact akan menutup.
Gambar 12. Skema relay elektromekanik
(sumber : http://handyw.files.wordpress.com)
Selain berfungsi sebagai komponen elektronik, relay juga mempunyai
fungsi sebagai pengendali sistem. Sehingga relay mempunyai 2 macam simbol
yang digunakan pada:
1. Rangkaian listrik (hardware)
29
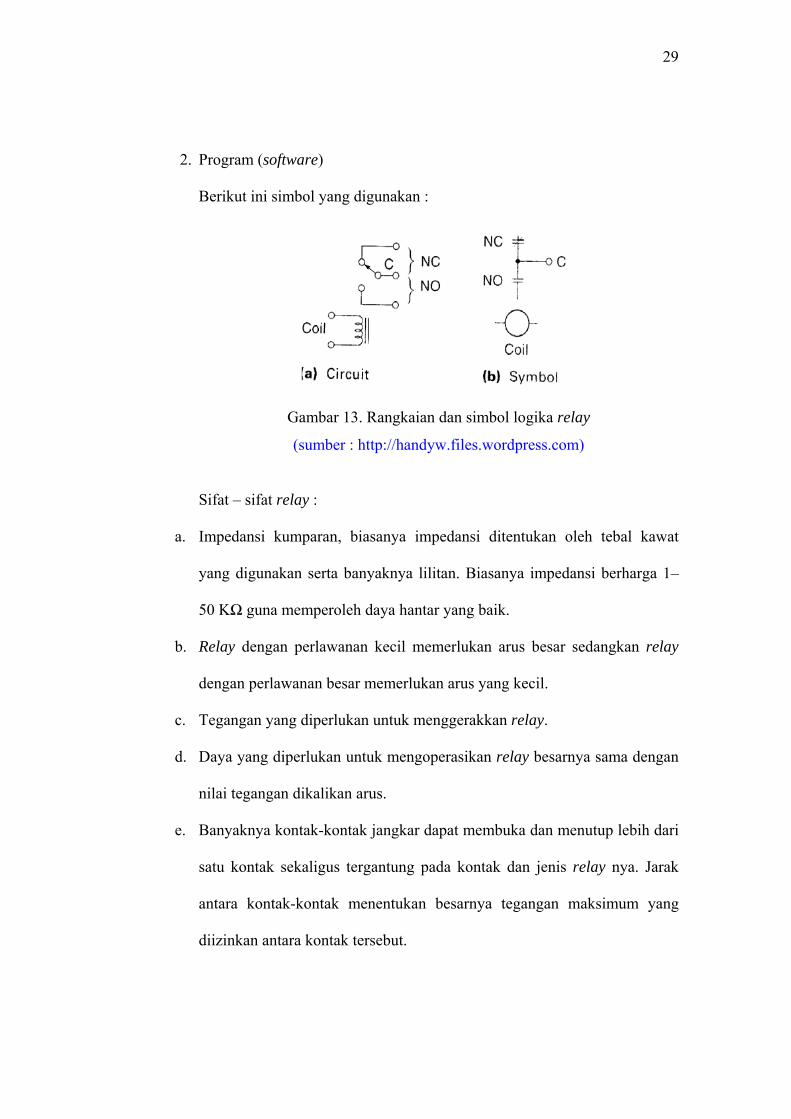
2. Program (software)
Berikut ini simbol yang digunakan :
Gambar 13. Rangkaian dan simbol logika relay
(sumber : http://handyw.files.wordpress.com)
Sifat – sifat relay :
a. Impedansi kumparan, biasanya impedansi ditentukan oleh tebal kawat
yang digunakan serta banyaknya lilitan. Biasanya impedansi berharga 1–
50 KΩ guna memperoleh daya hantar yang baik.
b. Relay dengan perlawanan kecil memerlukan arus besar sedangkan relay
dengan perlawanan besar memerlukan arus yang kecil.
c. Tegangan yang diperlukan untuk menggerakkan relay.
d. Daya yang diperlukan untuk mengoperasikan relay besarnya sama dengan
nilai tegangan dikalikan arus.
e. Banyaknya kontak-kontak jangkar dapat membuka dan menutup lebih dari
satu kontak sekaligus tergantung pada kontak dan jenis relay nya. Jarak
antara kontak-kontak menentukan besarnya tegangan maksimum yang
diizinkan antara kontak tersebut.
30
Gambar 14. Relay yang terdapat di pasaran
(www.germes-online.com)
H. Limit Switch
Sensor kontak (mechanical limit switch) atau dikenal dengan limit switch,
sensor ini bekerja dengan cara bersentuhan dengan objek yang dikenai. Limit
switch dapat difungsikan sebagai normally open atau normally close. Pada
normally close, kondisi awal rangkaian dalam keadaan terhubung, sehingga
ketika saklar tersebut ditekan membuat rangkaian menjadi terputus. Pada
normally open, kondisi awal rangkaian dalam keadaan terbuka, sehingga
ketika saklar tersebut ditekan membuat rangkaian menjadi terhubung.
Gambar 15. Limit switch yang terdapat di pasaran
31
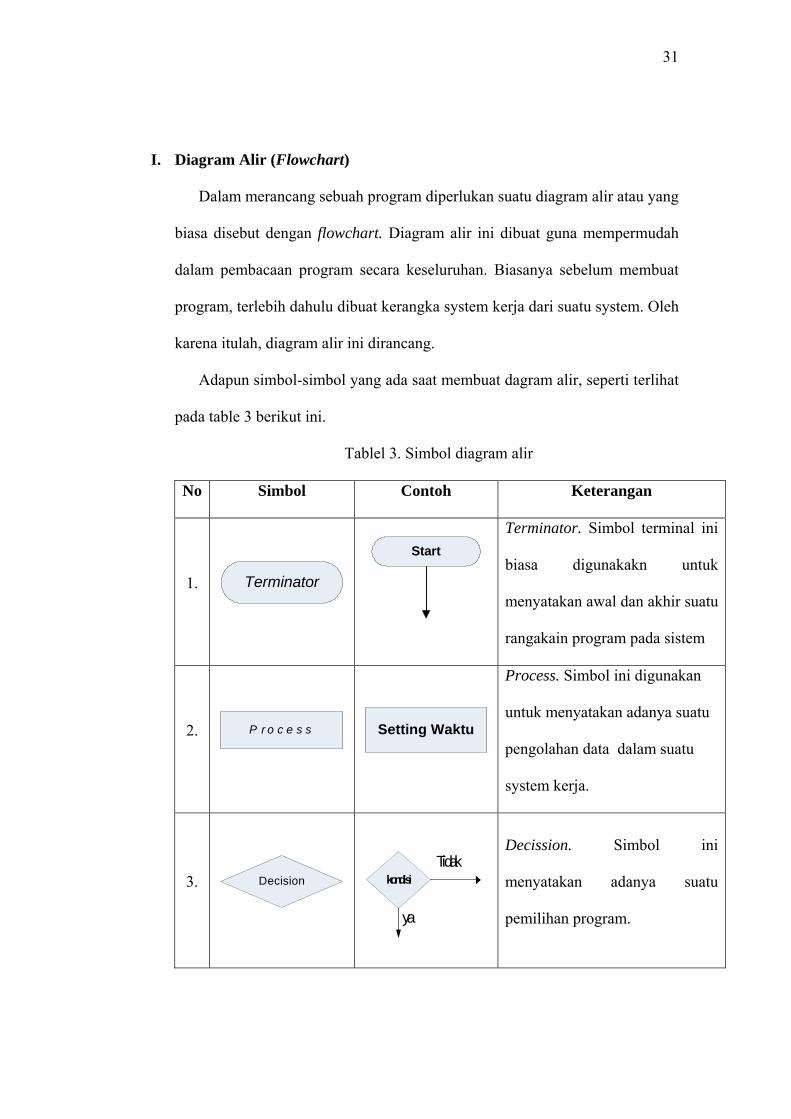
I. Diagram Alir (Flowchart)
Dalam merancang sebuah program diperlukan suatu diagram alir atau yang
biasa disebut dengan flowchart. Diagram alir ini dibuat guna mempermudah
dalam pembacaan program secara keseluruhan. Biasanya sebelum membuat
program, terlebih dahulu dibuat kerangka system kerja dari suatu system. Oleh
karena itulah, diagram alir ini dirancang.
Adapun simbol-simbol yang ada saat membuat dagram alir, seperti terlihat
pada table 3 berikut ini.
Tablel 3. Simbol diagram alir
No Simbol Contoh Keterangan
1. Terminator
Start
Terminator. Simbol terminal ini
biasa digunakakn untuk
menyatakan awal dan akhir suatu
rangakain program pada sistem
2. P r o c e s s
Setting Waktu
Process. Simbol ini digunakan
untuk menyatakan adanya suatu
pengolahan data dalam suatu
system kerja.
3. Decision
kondisiTidak
ya
Decission. Simbol ini
menyatakan adanya suatu
pemilihan program.
32
4. Input / Output
Baca
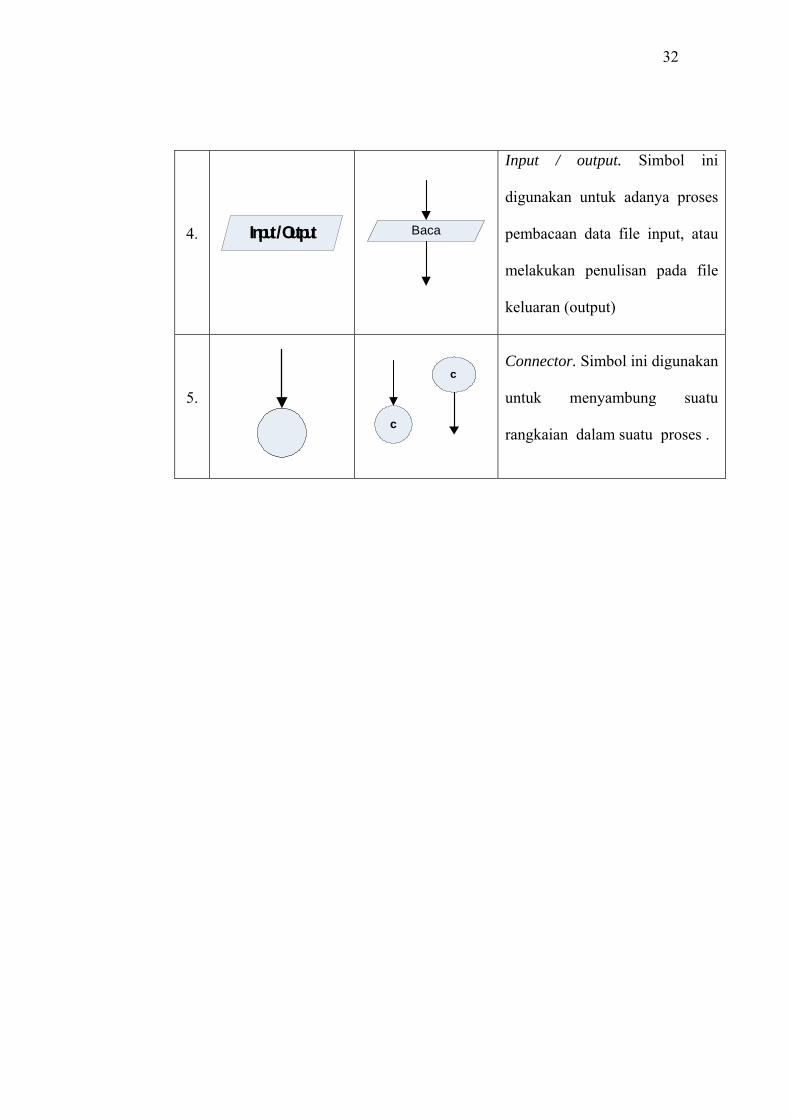
Input / output. Simbol ini
digunakan untuk adanya proses
pembacaan data file input, atau
melakukan penulisan pada file
keluaran (output)
5.
c
c
Connector. Simbol ini digunakan
untuk menyambung suatu
rangkaian dalam suatu proses .
BAB III
KONSEP PERANCANGAN DAN PENGUJIAN
A. Analisis Kebutuhan
Pemberi Pakan Ikan Otomatis Berbasis Mikrokontroller ATMega8535
dibuat dengan bentuk kontruksi secara umumnya yang terdiri dari :
1. Perangkat keras (Hardware) yaitu berupa beberapa sistem mekanik dan
rangkaian pengendali.
2. Perangkat lunak (Software) yaitu alir diagram program yang dibuat untuk
mengatur alur kerja sistem mekanik.
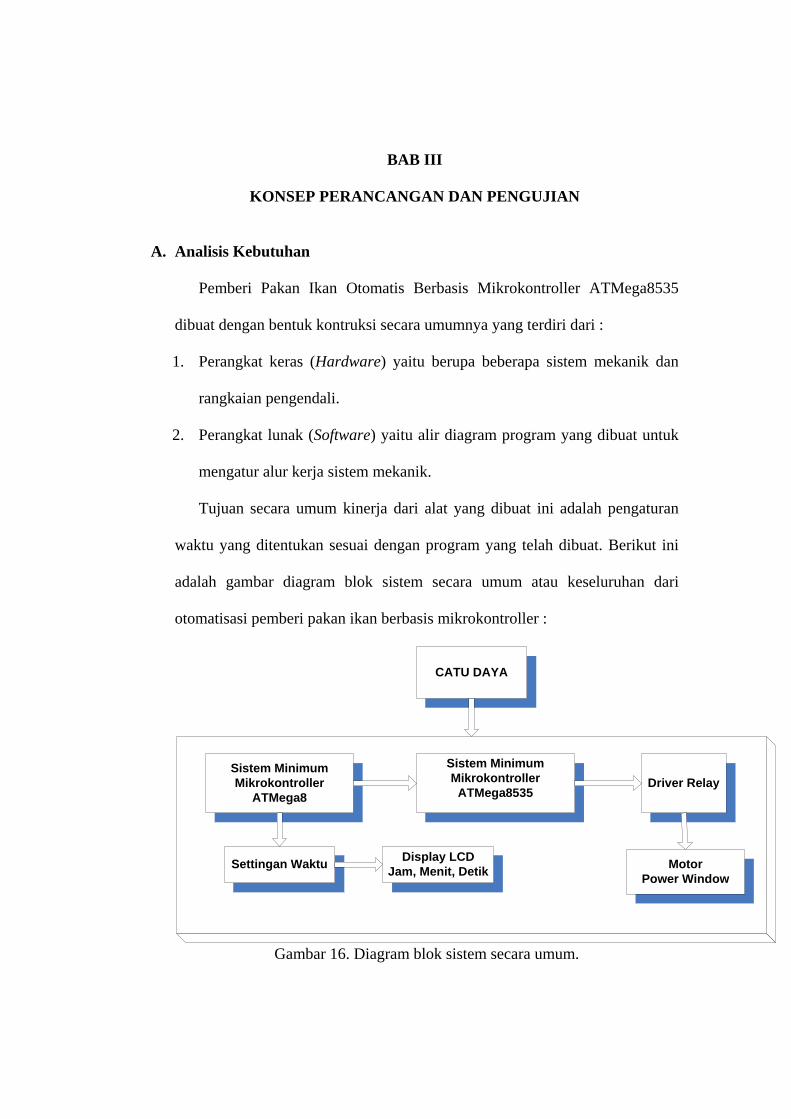
Tujuan secara umum kinerja dari alat yang dibuat ini adalah pengaturan
waktu yang ditentukan sesuai dengan program yang telah dibuat. Berikut ini
adalah gambar diagram blok sistem secara umum atau keseluruhan dari
otomatisasi pemberi pakan ikan berbasis mikrokontroller :
CATU DAYA
Sistem Minimum Mikrokontroller
ATMega8
Sistem Minimum Mikrokontroller
ATMega8535Driver Relay
Settingan Waktu Display LCD Jam, Menit, Detik Motor
Power Window
Gambar 16. Diagram blok sistem secara umum.

34
Berdasarkan gambar tersebut diatas, bagian-bagian yang dibutuhkan untuk
membangun alat ini, adalah sebagai berikut :
1. Rangkaian pengendali untuk mengatur semua proses kerja alat, sistem
minimum Mikrokontroller ATMega8535 dan ATMega8.
2. Catu daya 12 Volt dan 5 Volt digunakan sebagai sumber bagi motor DC
Power Window dan mikrokontroller, serta IC pendukung lainnya.
3. Tombol Push Button sebagai inputan pada mikrokontroller.
4. Output sistem untuk motor Power Window, display jam, display menit dan
timer.
5. Seperangkat box dengan kendali utama dan tombol.
6. Kabel penghubung antar catu daya dengan mikrokontroler, motor Power
Window, dan LCD (Liquid Crystal Display).
7. Besi berulir pada as motor Power Window.
B. Konsep Perancangan
Alat pemberi pakan ikan otomatis berbasis mikrokontroller ATMega8535,
secara umum terdiri dari perangkat keras (Hardware) dan perangkat lunak
(Software), serta rangkaian pengendali. Alat ini dibuat sebagai perkembangan
teknologi dalam mengembangkan alat yang sudah ada dalam era teknologi
seperti sekarang ini. Sistem yang dirancang tersebut menggunakan komputer
sebagai unit pemrograman pada mikrokontroller dan kendali utama.
35
Dalam mengoperasikan atau menjalankan alat pemberi pakan ikan
otomatis berbasis mikrokontroller ATMega8535, dibantu dengan
implementasi program sebagai alur kerja sistem. Perancangan alat pemberi
pakan ikan otomatis tersebut menekankan pada unjuk kerja dari motor Power
Window dan kesesuaian pemrograman yang dibuat dengan sistem mekanik
sebagai proses pemberi pakan ikan. Sehingga dengan waktu yang ditentukan
alat tersebut dapat beroperasi.
1. Proses pembuatan Hardware.
Untuk proses pembuatan Hardware pada alat ini meliputi 2 tahap. Tahap
yang pertama adalah pembuatan lay-out PCB, pelarutan PCB serta proses
perakitan komponen. Tahap kedua adalah pembuatan mekanik berupa Box.
a. Tahap pembuatan lay-out PCB.
Proses pembuatan lay-out diawali dengan menggambar tata letak
rangkaian dengan gambar skema rangkaian yang sudah ada. Kemudian
gambar yang sudah jadi tersebut dicopy dengan kertas transparan atau
glosi. Setelah itu gambar rangkaian disablonkan di PCB.
b. Tahap pelarutan.
Pada proses kedua ini tujuannya adalah melarutkan PCB yang telah
disablon gambar rangkaian dengan cairan pelarut dengan maksud untuk
menghilangkan tembaga yang tidak tersablon gambar rangkaian sehingga
mendapatkan hasil yang sesuai dengan gambar rangkaian.
36
c. Tahap perakitan komponen.
Pada tahap ini membutuhkan kesabaran dan ketrampilan tangan. Proses
perakitan yang pertama adalah melubangi PCB dengan bor kecil sesuai
dengan tata letak komponen. Kemudian langkah kedua adalah memasang
komponen sesuai dengan tata letak dan menyolder komponen-komponen
yang sudah dipasang tersebut.
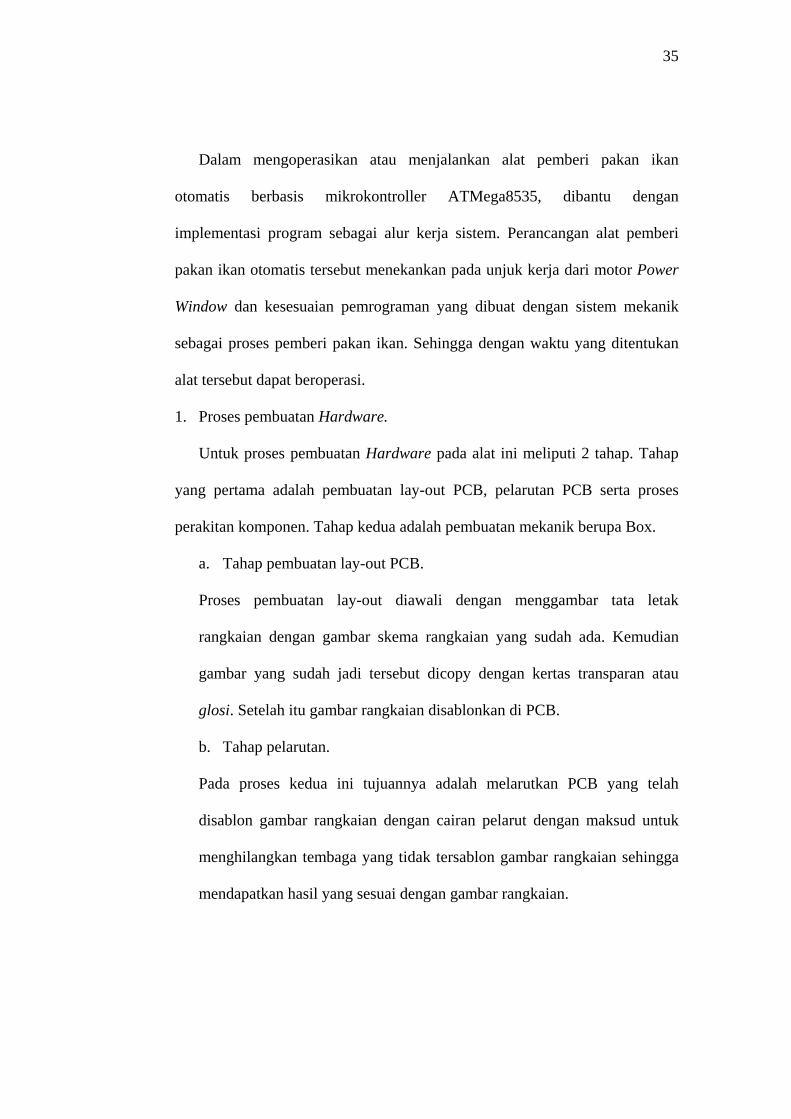
2. Pembuatan mekanik Box
Proses pembuatan Box ditujukan untuk rangkaian pengendali.
a. Pembuatan Box untuk rangkaian.
Pembuatan Box untuk rangkaian ini menggunakan plat eser dengan
ketebalan 1.5 mm. Berbentuk balok dengan tinggi 18 cm, lebar 25 cm, dan
panjang 43 cm.
INTERUPTENTER
TAMPAK DEPAN
TAMPAK SAMPING
LCD
RESETJAM
P = 43 cm
t= 1
8 cm
MENIT JAM
RESETMIKRO
DETIKl =25 cmPOWER
Gambar 17. Box rangkaian
37
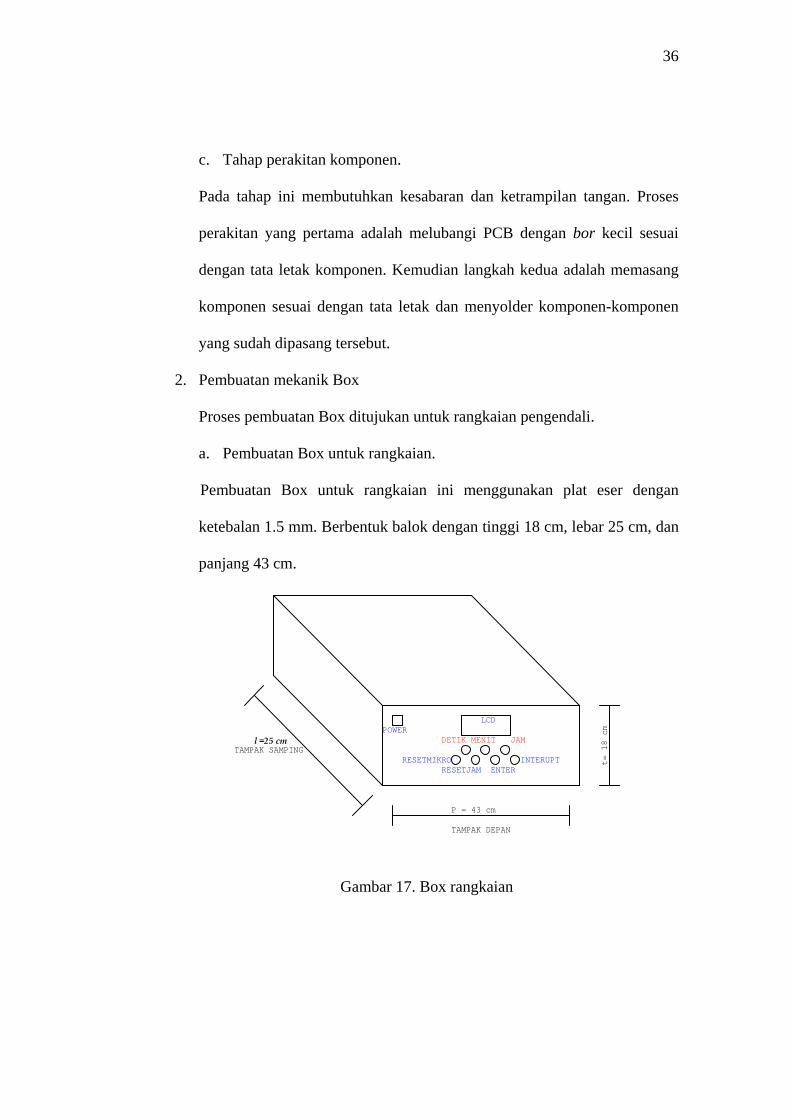
3. Pembuatan Mekanik
Mekanik atau body digunakan sebagai sebagai penopang alat secara
keseluruhan, pemilihan bahan seperti besi sangatlah cocok, karena besi
merupakan bahan yang kuat dan harganya pun relatif murah. Sedangkan untuk
piringan nya terbuat dari alumunium. Hal ini dikarenakan alumunium
merupakan bahan yang ringan bila dibandingkan dengan besi. Adapun untuk
ukuran panjang lintasan rel 2 m, tinggi penyangga 1.5 m, lebar 50 cm.
Gambar 18. Kerangka Mekanik
4. Perancangan Perangkat Lunak
Pada sistem pemberi pakan ikan otomatis berbasis mikrokontroller
ATMega8535 ini, diprogram dengan bahasa pemrograman BASCOM.
Dengan menggunakan perangkat lunak BASCOM-AVR, file ini kemudian
dicompile menjadi file hexadesimal dengan ekstensi file *.hex. File .hex ini
38
kemudian didownload ke dalam mikrokontroller dengan menggunakan
perangkat lunak PonyProg 2000.
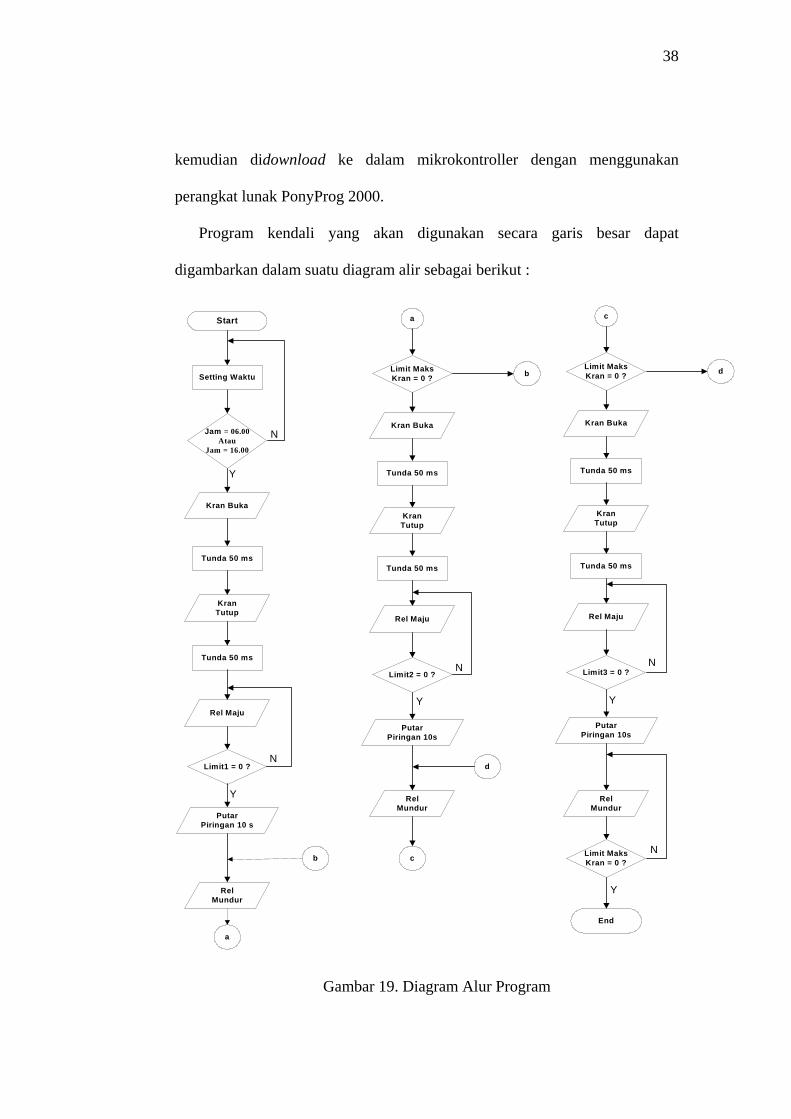
Program kendali yang akan digunakan secara garis besar dapat
digambarkan dalam suatu diagram alir sebagai berikut :
Start
Jam = 06.00Atau
Jam = 16.00
Kran Buka
Tunda 50 ms
Kran Tutup
Tunda 50 ms
Rel Maju
Limit1 = 0 ?
Putar Piringan 10 s
Rel Mundur
a
a
Limit Maks Kran = 0 ?
Kran Buka
Tunda 50 ms
Kran Tutup
Tunda 50 ms
Rel Maju
Limit2 = 0 ?
Putar Piringan 10s
Rel Mundur
c
c
Limit Maks Kran = 0 ?
Kran Buka
Tunda 50 ms
Kran Tutup
Tunda 50 ms
Rel Maju
Limit3 = 0 ?
Putar Piringan 10s
Rel Mundur
Limit Maks Kran = 0 ?
End
b
d
dSetting Waktu
b
Y
N
N
Y
N
Y
N
Y
N
Y
Gambar 19. Diagram Alur Program
39
C. Perancangan Rangkaian
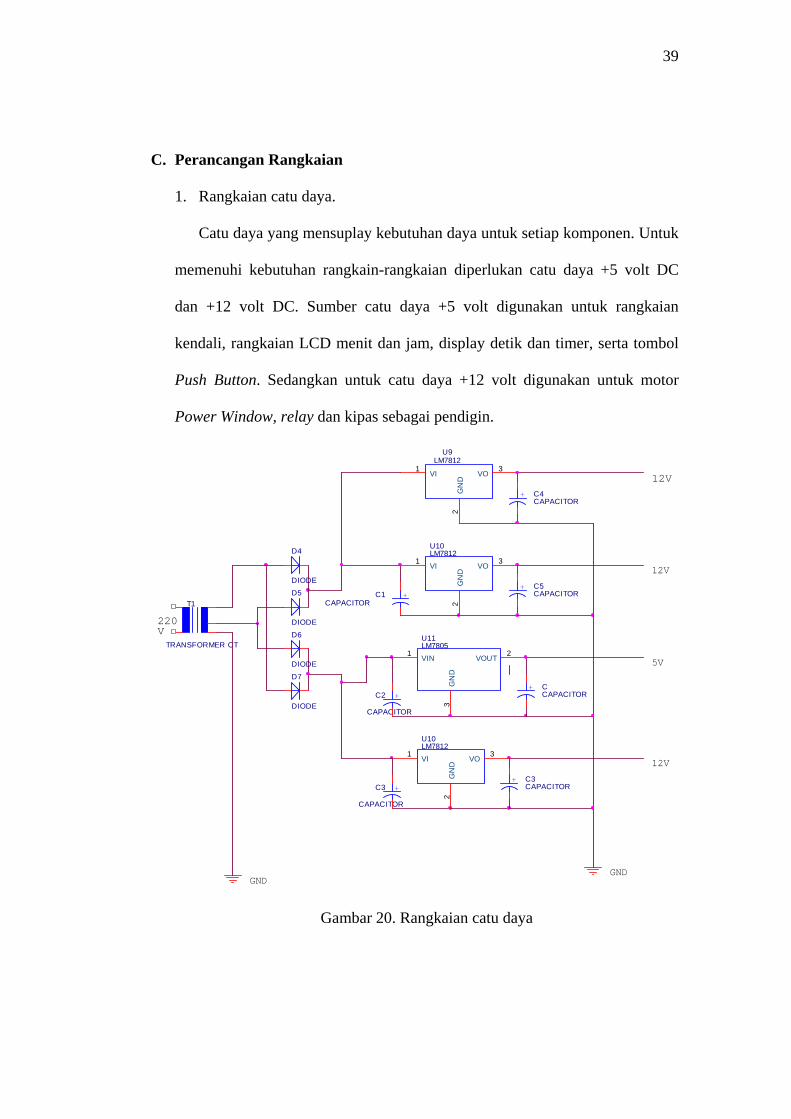
1. Rangkaian catu daya.
Catu daya yang mensuplay kebutuhan daya untuk setiap komponen. Untuk
memenuhi kebutuhan rangkain-rangkaian diperlukan catu daya +5 volt DC
dan +12 volt DC. Sumber catu daya +5 volt digunakan untuk rangkaian
kendali, rangkaian LCD menit dan jam, display detik dan timer, serta tombol
Push Button. Sedangkan untuk catu daya +12 volt digunakan untuk motor
Power Window, relay dan kipas sebagai pendigin.
+ C4CAPACITOR
+ CCAPACITOR
+ C3CAPACITOR
+C2
CAPACITOR
+ C5CAPACITOR
GND
U9LM7812
1
2
3VI
GN
D
VO
U11LM7805
1
3
2VIN
GN
D
VOUT
U10LM7812
1
2
3VI
GN
D
VO
GND
12V
U10LM7812
1
2
3VI
GN
D
VO
5V
+C3
CAPACITOR
12V
220V
12V
+C1CAPACITOR T1
TRANSFORMER CT
D4
DIODED5
DIODE
D7
DIODE
D6
DIODE
Gambar 20. Rangkaian catu daya
40
Rangkaian tersebut terdiri dari komponen transformator Step Down.
Transformator ini mendapat suplay dari tegangan jala-jala PLN, kemudian
tegangannya diturunkan dari 220 volt dari sisi primer menjadi tegangan 12
volt pada sisi sekunder. Setelah itu, tegangan AC tersebut disearahkan dengan
menggunakan dioda jembatan untuk menghasilkan output berdenyut.
Kapasitor C1 sebesar 35V/1000µF yang dipasang pararel terhadap resistor
digunakan sebagai filter. Untuk menstabilkan tegangan output ditambahkan IC
Regulator LM7805 yang berfungsi sebagai pengatur tegangan. Penambahan
transistor pada rangkaian tersebut dimaksudkan untuk penguat daya yang
nantinya digunakan dalam mensuplay rangkaian-rangkaian yang lain.
Kapasitor C2 35V/1000µF berfungsi penghalus tegangan atau penghilang
ripple. Keluaran tersebut tetap sebesar 5 volt.
Rangkaian Catu daya ini tersusun atas beberapa komponen antara lain:
a) TRAFO Step Down
Trafo Step Down merupakan suatu komponen yang berfungsi untuk
menurunkan tegangan AC 220 V menjadi tegangan AC 12V.
b) Dioda
Dioda merupakan suatu komponen yang berfungsi untuk
menyearahkan gelombang AC menjadi gelombang DC.
c) Kapasitor
Kapasitor yang digunakan adalah kapasitor jenis elektrolit, yang
berfungsi sebagai perata tegangan setelah disearahkan menggunakan
dioda.
41
d) IC LM7805
IC 7805 ini berfungsi untuk membatasi tegangan agar output yang
keluar maksimal 5 Volt DC.
e) IC LM7812
IC 7812 ini berfungsi untuk membatasi tegangan agar output yang
keluar maksimal 12 Volt DC, digunakan untuk menyuplai tegangan
pada rangkaian kendali dan relay.
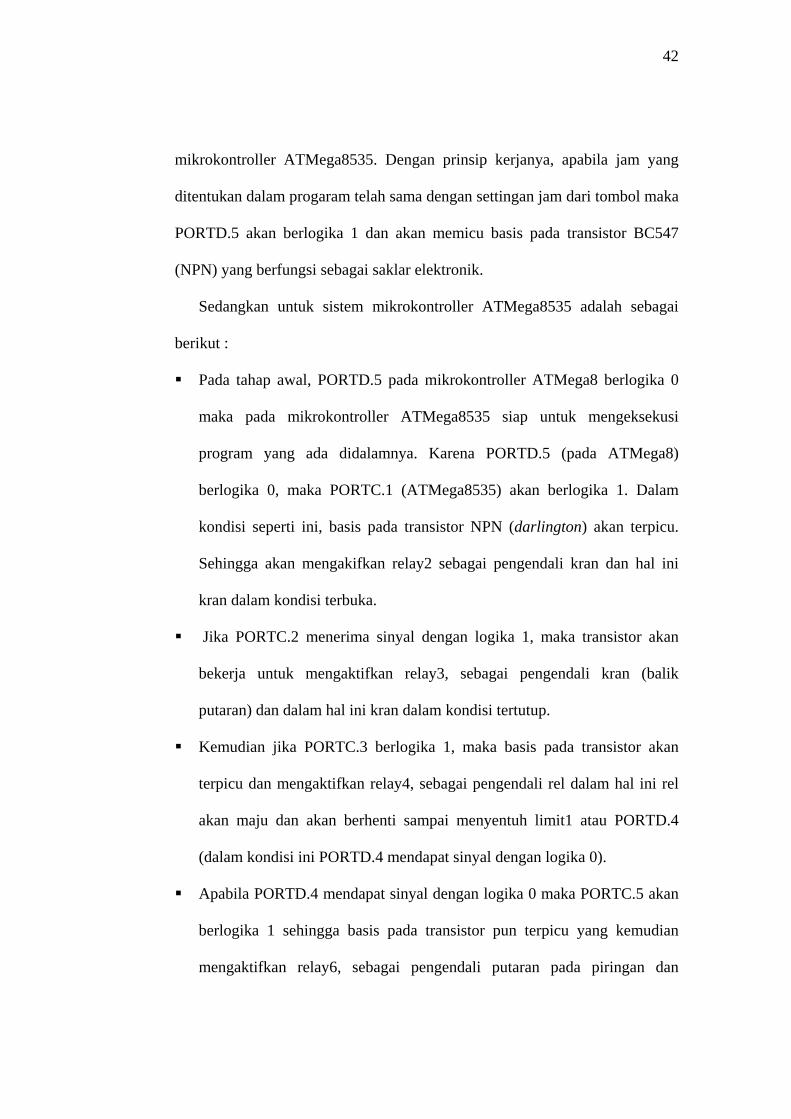
2. Rangkaian Mikrokontroller ATMega8535, ATMega8, dan ULN2804A
Sistem minimum mikrokontroller ATMega8535 ini digunakan untuk
mengendalikan aktif tidaknya power windows sedangkan sistem minimum
mikrokontroller ATMega8 digunakan untuk mengendalikan tampilan jam
pada LCD. Pada perancangan dan pembuatan alat ini digunakan sebuah IC
mikrokontroller ATMega8535, ATMega8 serta driver motor.
Pada rangkaian sistem minimum ATMega8535 ini terdiri dari rangkain
osilator (kristal dan dua kapasitor), dan rangkaian reset (resistor dan
kapasitor). Selain itu, sistem kerja rangkaian yang lainnya yaitu rangkain
resonator yang terdiri dari X-TAL 4Mhz serta dua buah kapasitor C1 dan C2
senilai 30pF yang berfungsi sebagai penghasil clock internal (penghasil detak)
agar mikrokontroller ATMega8535 dapat menjalankan eksekusi program.
Nilai dari clock internal ini tergantung dari keramik resonator (X-TAL) yang
digunakan.
Dalam sistem ATMega8 digunakan sebagai pengendali jam digital yang
nanti nya difungsikan sebagai penyetingan jam untuk mengaktifkan
42
mikrokontroller ATMega8535. Dengan prinsip kerjanya, apabila jam yang
ditentukan dalam progaram telah sama dengan settingan jam dari tombol maka
PORTD.5 akan berlogika 1 dan akan memicu basis pada transistor BC547
(NPN) yang berfungsi sebagai saklar elektronik.
Sedangkan untuk sistem mikrokontroller ATMega8535 adalah sebagai
berikut :
Pada tahap awal, PORTD.5 pada mikrokontroller ATMega8 berlogika 0
maka pada mikrokontroller ATMega8535 siap untuk mengeksekusi
program yang ada didalamnya. Karena PORTD.5 (pada ATMega8)
berlogika 0, maka PORTC.1 (ATMega8535) akan berlogika 1. Dalam
kondisi seperti ini, basis pada transistor NPN (darlington) akan terpicu.
Sehingga akan mengakifkan relay2 sebagai pengendali kran dan hal ini
kran dalam kondisi terbuka.
Jika PORTC.2 menerima sinyal dengan logika 1, maka transistor akan
bekerja untuk mengaktifkan relay3, sebagai pengendali kran (balik
putaran) dan dalam hal ini kran dalam kondisi tertutup.
Kemudian jika PORTC.3 berlogika 1, maka basis pada transistor akan
terpicu dan mengaktifkan relay4, sebagai pengendali rel dalam hal ini rel
akan maju dan akan berhenti sampai menyentuh limit1 atau PORTD.4
(dalam kondisi ini PORTD.4 mendapat sinyal dengan logika 0).
Apabila PORTD.4 mendapat sinyal dengan logika 0 maka PORTC.5 akan
berlogika 1 sehingga basis pada transistor pun terpicu yang kemudian
mengaktifkan relay6, sebagai pengendali putaran pada piringan dan
43
piringan pun akan berputar selama batas waktu yang telah ditentukan. Jika
piringan telah berhenti, maka PORTC.4 akan mendapatkan sinyal yang
berlogika 1 sehingga basis pada transistor dipicu dan akan mengaktifkan
relay4, sebagai pengendali rel (hal ini berarti rel dalam kondisi mundur).
Keadaan seperti yang telah dipaparkan di atas akan sama kerja nya untuk
limit2 dan limit3.
kran tutup
enter
SW1
R1
10k
mak_kran
jam
LCD
13121110987
14
654321
D6D5D4D3D2D1D0
D7
ERWRS
VEEVDDVSS
mak_ttp
100n
mak_buka
5Volt
kran buka
BC 547
5Volt
RESISTOR
limit3
RV5k
Y1
4MHZ
100n
rel maju
30p
30p
ULN2804A
2345678
12
1413
15161718
1110
1
9
2B3B4B5B6B7B8B
7C
5C6C
4C3C2C1C
8CCOM
1B
GND
R1
10k
detik
piringan
limit1
pow er relay
ATMEGA 8535
91213
11
30
31
32
10
2223242526272829
14
151617181920
12345678
4039383736353433
RESETXTAL2XTAL1
GND
AVCC
GND*
AREV
VCC
PC0/SCLPC1/SDA
PC2PC3PC4PC5
PC6/TOSC1PC7/TOSC2
PD0/RXD
PD1/TXDPD2/INT0PD3/INT1
PD4/OC1BPD5/OC1APD6/ICP1
PB0/T0PB1/T1PB2/AIN0PB3/AIN1PB4/SSPB5/MOSIPB6/MISOPB7/SCK
PA0/ADC0PA1/ADC1PA2/ADC2PA3/ADC3PA4/ADC4PA5/ADC5PA6/ADC6PA7/ADC7
limit2
ATMega8
26
24 23456
27287
23
25
11
1415
1920
181716
22
81312219
101
PC3(ADC3)
PC1(ADC1) PD0(RXD)PD1(TXD)
PD2(INT0)PD3(INT1)
PD4(T0)PC4(ADC4)PC5(ADC5)VCC
PC0(ADC0)
PC2(ADC2)
PD5(T1)
PB0PB1
PB5AVCC
PB4PB3PB2
GND
GNDPD7PD6AREFPB6(XTAL1)PB7(XTAL2)PC6(RESET)
5VOLT
rel mundur
menit
VCC
30p
30p
interupt
SW1
Y1
4MHZ
Gambar 21. Rangkaian Mikrokontroller ATMega8535, ATMega8 dan Driver motor ULN2804A
44
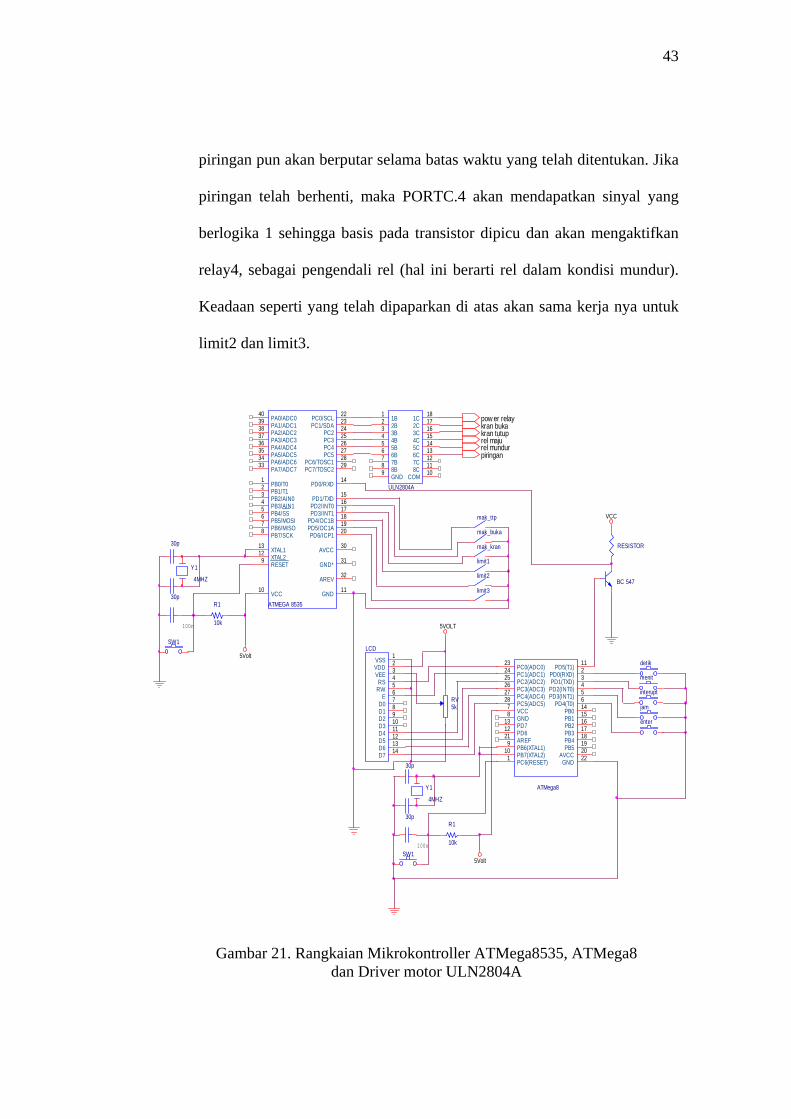
3. Rangkaian display jam, menit dan detik
Rangkain display jam, menit dan detik digunakan sebagai settingan waktu
dan penampil detik lewat LCD (Liquid Crystal Display). Semua IC yang ada
pada rangkaian ini mendapat supplay tegangan +5 volt. Pengaturan setting
waktu dilakukan pada tombol pada Push Button yang ada pada rangkain
setting waktu. Pemasangan potensio pada rangkaian ini dimaksudkan sebagai
pengaturan cahaya dari LCD. Pada rangkaian ini, digunakan 5 buah tombol
Push Button yang terdiri dari interupt, enter, jam, menit, detik. Salah satu kaki
dari tombol-tombel tersebut di pararel dan mendapat inputan dari sumber.
Tombol Push Button ini berfungsi sebagai inputan mikrokontroller.
jam
menit
5VOLT
Y1
4MHZ
RV5k
enter
ATMega8
26
24 23456
27287
23
25
11
1415
1922
181716
20
81312219
101
PC3(ADC3)
PC1(ADC1) PD0(RXD)PD1(TXD)
PD2(INT0)PD3(INT1)
PD4(T0)PC4(ADC4)PC5(ADC5)VCC
PC0(ADC0)
PC2(ADC2)
PD5(T1)
PB0PB1
PB5GND
PB4PB3PB2
AVCC
GNDPD7PD6AREFPB6(XTAL1)PB7(XTAL2)PC6(RESET)
R1
10k
detik
LCD
13121110987
14
654321
D6D5D4D3D2D1D0
D7
ERWRS
VEEVDDVSS
100n
30p
30p
interupt
SW1
5Volt
Gambar 22. Rangkaian display jam, menit dan detik.
45
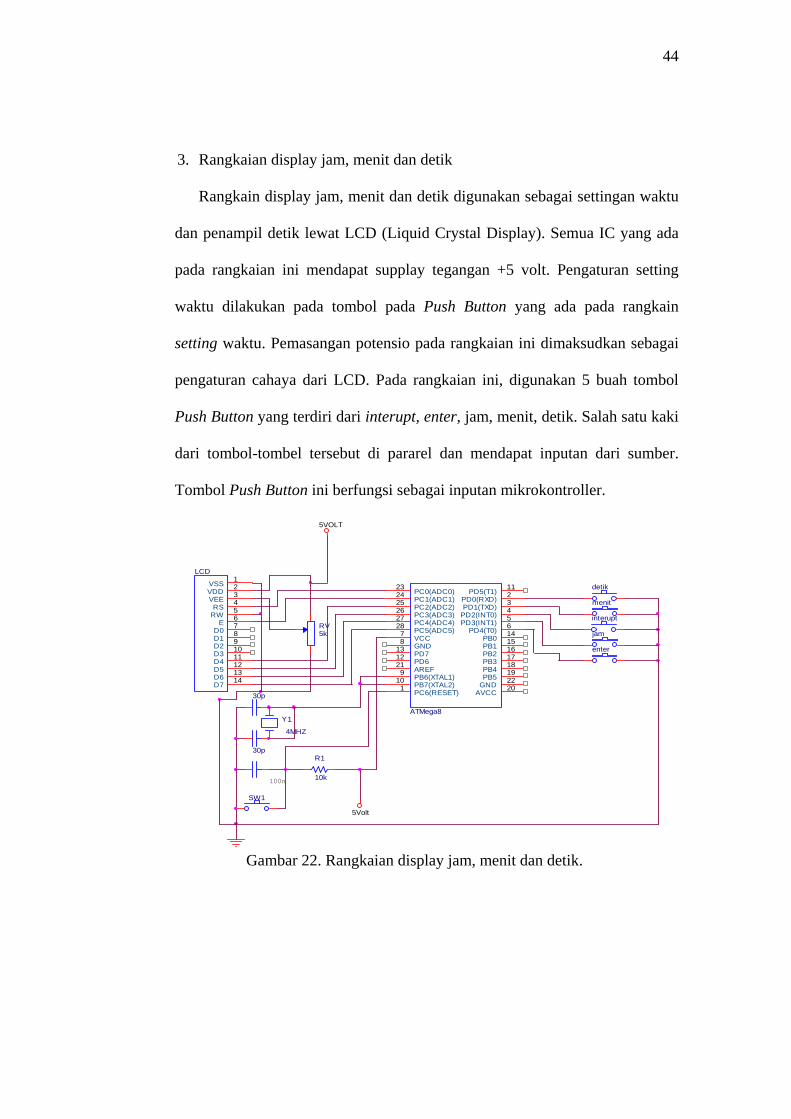
Tabel 4. Daftar komponen pada rangkaian display jam, menit dan detik
NO KOMPONEN JUMLAH (Buah)
1 IC ATMega8 1
2 Potensio 1
3 LCD 1
4 Resistor 1
5 Push Button 5
6 Kabel Secukupnya
4. Driver Relay (ULN2804A)
Rangkaian driver/penggerak yang digunakan pada Proyek akhir ini
berfungsi sebagai antarmuka antara mikrokontroller dengan rangkaian daya
(motor). Selain berfungsi sebagai antarmuka rangkaian ini juga berfungsi
sebagai pengaman atau isolasi antara rangkaian daya dengan mikrokontroller
sehingga bila terjadi kerusakan pada rangkaian daya maka mikrokontroller
tidak mengalami kerusakan.
Komponen utama pembentuk rangkaian driver berupa IC ULN2804A
yang merupakan transistor darlington. Susunan rangkaian driver ditunjukan
pada gambar berikut :
Piringan
Pow er Relay(Port.C0)
Piringan(PORT.C5)
Pow er Relay
Rel Mundur(PORT.C4)
ULN2804A
2345678
12
1413
15161718
1110
1
9
2B3B4B5B6B7B8B
7C
5C6C
4C3C2C1C
8CCOM
1B
GND
Rel Mundur
Kran Tutup(Port.C2)
12Volt
Rel Maju(PORT.C3)
Kran Buka(Port.C1)
Kran Tutup
Kran Buka
Rel Maju
Gambar 23. Rangkaian Driver Motor ULN2804A
46
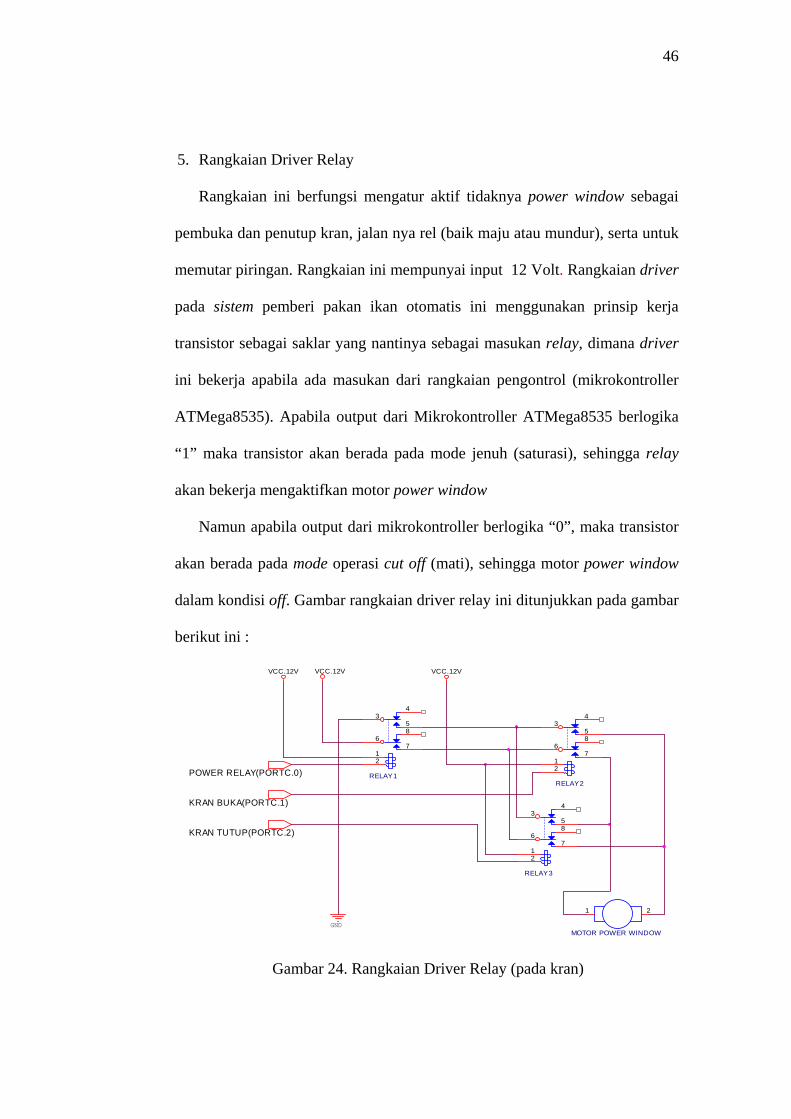
5. Rangkaian Driver Relay
Rangkaian ini berfungsi mengatur aktif tidaknya power window sebagai
pembuka dan penutup kran, jalan nya rel (baik maju atau mundur), serta untuk
memutar piringan. Rangkaian ini mempunyai input 12 Volt. Rangkaian driver
pada sistem pemberi pakan ikan otomatis ini menggunakan prinsip kerja
transistor sebagai saklar yang nantinya sebagai masukan relay, dimana driver
ini bekerja apabila ada masukan dari rangkaian pengontrol (mikrokontroller
ATMega8535). Apabila output dari Mikrokontroller ATMega8535 berlogika
“1” maka transistor akan berada pada mode jenuh (saturasi), sehingga relay
akan bekerja mengaktifkan motor power window
Namun apabila output dari mikrokontroller berlogika “0”, maka transistor
akan berada pada mode operasi cut off (mati), sehingga motor power window
dalam kondisi off. Gambar rangkaian driver relay ini ditunjukkan pada gambar
berikut ini :
VCC.12V
RELAY1
34
5
68
712
RELAY3
34
5
68
712
MOTOR POWER WINDOW
1 2
VCC.12V
GND
KRAN BUKA(PORTC.1)
KRAN TUTUP(PORTC.2)
VCC.12V
POWER RELAY(PORTC.0)RELAY2
34
5
68
712
Gambar 24. Rangkaian Driver Relay (pada kran)

47
D. Rencana Pengujian
Tujuan pengambilan data adalah untuk mengetahui kebenaran rangkaian
dan mengetahui kondisi komponen, alat, serta hasil dari pengujian dari alat itu
sendiri.
1. Langkah-langkah pengambilan data
a. Menghubungkan keluaran dari rangkaian power ke sumber tegangan
220V.
b. Menghidupkan saklar.
c. Menjalankan alat dan melakukan pengujian sesuai dengan tabel
pengujian alat.
2. Alat dan bahan yang digunakan
Multimeter analog digunakan untuk mengukur besar tegangan pada rating
logika 1 atau 0.
3. Perencanaan tabel pengujian
Dalam pengujian, diadakan pengamatan mengenai rangkaian driver catu
daya dan jumlah bobot pelet yang tertebar dalam kurun waktu yang telah
ditentukan.
BAB IV
HASIL PENGUJIAN DAN PEMBAHASAN
A. Hasil Pengujian Alat
Pada sistem pemberi pakan ikan otomatis berbasis mikrokontroller
ATMega8535 ini, dalam pengambilan data dilakukan pengamatan pada tiap-
tiap bagian atau blok. Untuk dapat melakukan pengamatan, dilakukan
pengukuran pada masing-masing blok sistem ataupun komponen yang
digunakan sehingga dapat dihasilkan perbandingan antara teoritis dan secara
prakteknya.
1. Pengujian Perangkat Keras
a. Blok Driver
Relay yang digunakan memiliki spesifikasi 28V-5A-8pin. Penggunaan
jenis ini dimaksudkan agar hardware masih dapat bekerja untuk
melakukan pensaklaran pada beban yang berdaya 350 W,dan 12 Volt dc,
yaitu power window.
Apabila rangkaian mendapatkan logika 1 dari rangkaian
mikrokontroler, maka saklar di dalam relay dalam keadaan hubung (ON).
Hal tersebut menyebabkan beban output yang dalam hal ini adalah motor
power window akan aktif.
Rangkaian driver dirancang dengan menggunakan transistor dan relay.
Rangkaian ini memanfaatkan transistor sebagai saklar elektronis yang
dapat menghidupkan serta mematikan relay. Setelah mencapai tegangan
49
kerja (yaitu 0,7 Volt untuk VBE) transistor akan berfungsi sebagai saklar
tertutup . Jika arus basis lebih besar atau sama dengan IB, maka titik kerja
transistor ada pada ujung garis beban, Vcc akan kecil dan transistor
bekerja pada daerah jenuh seperti sebuah saklar yang tertutup dan dapat
mengaktifkan relay. Saat kumparan relay mendapatkan arus listrik, inti
besi akan menjadi magnet dan akan menarik kontak relay sehingga
menjadi tertutup. Dengan menutupnya kontak relay akan melewatkan
tegangan AC 220V ke power window atau DC 12 Volt sehingga
pengendali yang ditujukan akan menyala (on).
Relay yang ada dalam sistem ini difungsikan untuk mengaktifkan
motor power window dengan beban 12V DC, maka digunakan relay yang
mempunyai nilai 5 Amp/ 28Volt, dengan perhitungan :
P. max = I × V (3)
= 5 Amp × 28 Volt
= 140 Watt
Dimana : P.max = Daya maksimal (Watt)
I = Arus (Ampere)
V = Tegangan (Volt)
Walaupun spesifikasi relay yang digunakan sesungguhnya terlalu
besar untuk beban yang hanya 12 Volt DC, namun hal itu dilakukan
karena untuk kehandalan relay. Dengan kapasitas maksimum relay yang
50
mencapai nilai beban yang baik untuk relay sebesar 140 Watt, maka untuk
mengaktifkan power window yang hanya 12V DC sangat aman.
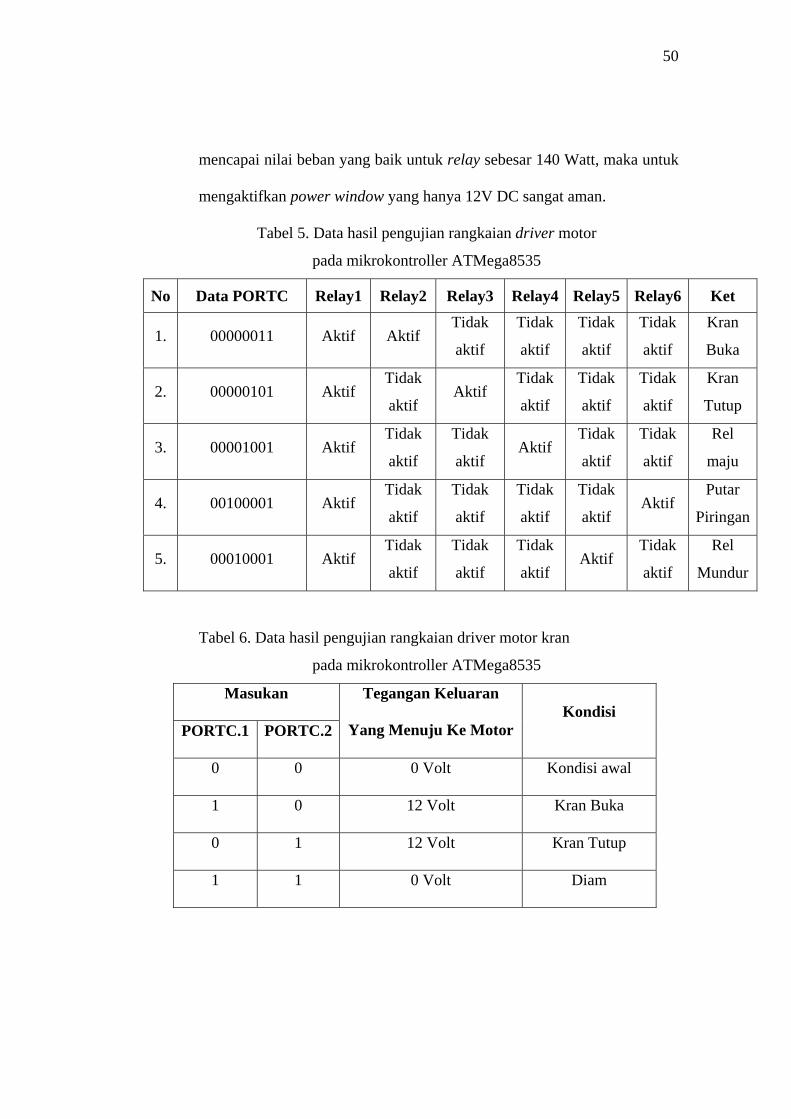
Tabel 5. Data hasil pengujian rangkaian driver motor
pada mikrokontroller ATMega8535
No Data PORTC Relay1 Relay2 Relay3 Relay4 Relay5 Relay6 Ket
1. 00000011 Aktif Aktif Tidak
aktif
Tidak
aktif
Tidak
aktif
Tidak
aktif
Kran
Buka
2. 00000101 Aktif Tidak
aktif Aktif
Tidak
aktif
Tidak
aktif
Tidak
aktif
Kran
Tutup
3. 00001001 Aktif Tidak
aktif
Tidak
aktif Aktif
Tidak
aktif
Tidak
aktif
Rel
maju
4. 00100001 Aktif Tidak
aktif
Tidak
aktif
Tidak
aktif
Tidak
aktif Aktif
Putar
Piringan
5. 00010001 Aktif Tidak
aktif
Tidak
aktif
Tidak
aktif Aktif
Tidak
aktif
Rel
Mundur
Tabel 6. Data hasil pengujian rangkaian driver motor kran
pada mikrokontroller ATMega8535
Masukan
PORTC.1 PORTC.2
Tegangan Keluaran
Yang Menuju Ke Motor Kondisi
0 0 0 Volt Kondisi awal
1 0 12 Volt Kran Buka
0 1 12 Volt Kran Tutup
1 1 0 Volt Diam
51
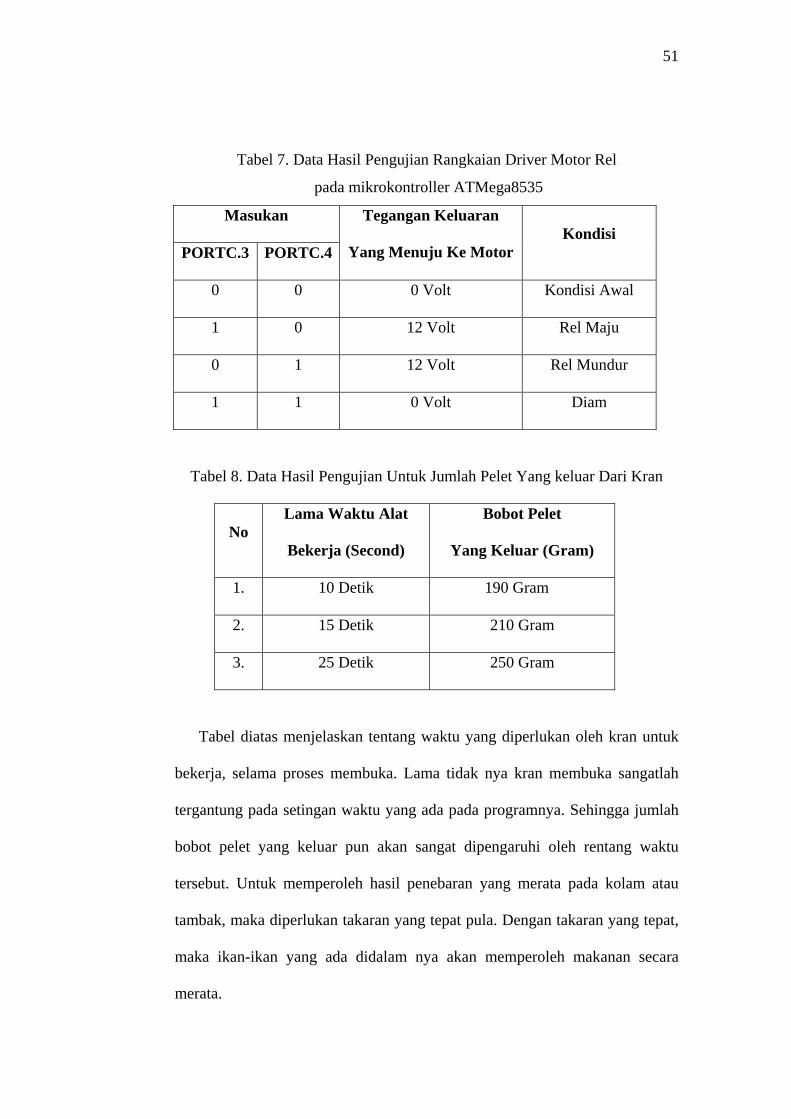
Tabel 7. Data Hasil Pengujian Rangkaian Driver Motor Rel
pada mikrokontroller ATMega8535
Masukan
PORTC.3 PORTC.4
Tegangan Keluaran
Yang Menuju Ke Motor Kondisi
0 0 0 Volt Kondisi Awal
1 0 12 Volt Rel Maju
0 1 12 Volt Rel Mundur
1 1 0 Volt Diam
Tabel 8. Data Hasil Pengujian Untuk Jumlah Pelet Yang keluar Dari Kran
No Lama Waktu Alat
Bekerja (Second)
Bobot Pelet
Yang Keluar (Gram)
1. 10 Detik 190 Gram
2. 15 Detik 210 Gram
3. 25 Detik 250 Gram
Tabel diatas menjelaskan tentang waktu yang diperlukan oleh kran untuk
bekerja, selama proses membuka. Lama tidak nya kran membuka sangatlah
tergantung pada setingan waktu yang ada pada programnya. Sehingga jumlah
bobot pelet yang keluar pun akan sangat dipengaruhi oleh rentang waktu
tersebut. Untuk memperoleh hasil penebaran yang merata pada kolam atau
tambak, maka diperlukan takaran yang tepat pula. Dengan takaran yang tepat,
maka ikan-ikan yang ada didalam nya akan memperoleh makanan secara
merata.
52
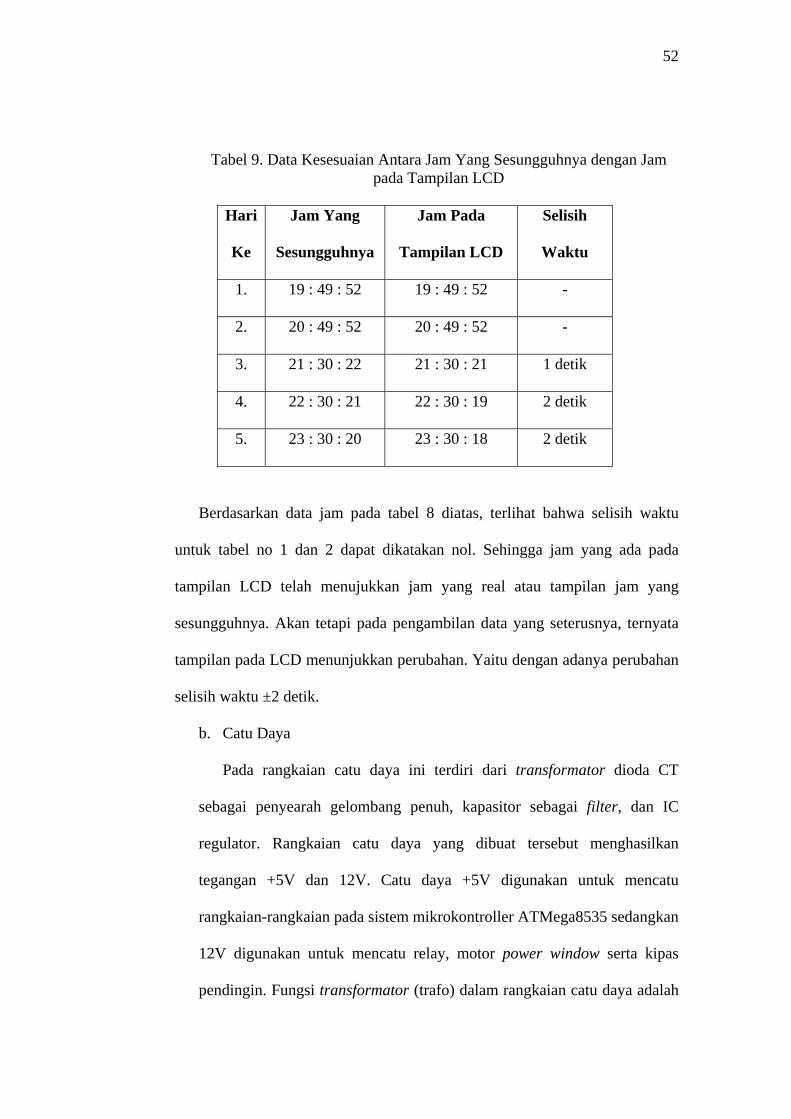
Tabel 9. Data Kesesuaian Antara Jam Yang Sesungguhnya dengan Jam pada Tampilan LCD
Hari
Ke
Jam Yang
Sesungguhnya
Jam Pada
Tampilan LCD
Selisih
Waktu
1. 19 : 49 : 52 19 : 49 : 52 -
2. 20 : 49 : 52 20 : 49 : 52 -
3. 21 : 30 : 22 21 : 30 : 21 1 detik
4. 22 : 30 : 21 22 : 30 : 19 2 detik
5. 23 : 30 : 20 23 : 30 : 18 2 detik
Berdasarkan data jam pada tabel 8 diatas, terlihat bahwa selisih waktu
untuk tabel no 1 dan 2 dapat dikatakan nol. Sehingga jam yang ada pada
tampilan LCD telah menujukkan jam yang real atau tampilan jam yang
sesungguhnya. Akan tetapi pada pengambilan data yang seterusnya, ternyata
tampilan pada LCD menunjukkan perubahan. Yaitu dengan adanya perubahan
selisih waktu ±2 detik.
b. Catu Daya
Pada rangkaian catu daya ini terdiri dari transformator dioda CT
sebagai penyearah gelombang penuh, kapasitor sebagai filter, dan IC
regulator. Rangkaian catu daya yang dibuat tersebut menghasilkan
tegangan +5V dan 12V. Catu daya +5V digunakan untuk mencatu
rangkaian-rangkaian pada sistem mikrokontroller ATMega8535 sedangkan
12V digunakan untuk mencatu relay, motor power window serta kipas
pendingin. Fungsi transformator (trafo) dalam rangkaian catu daya adalah
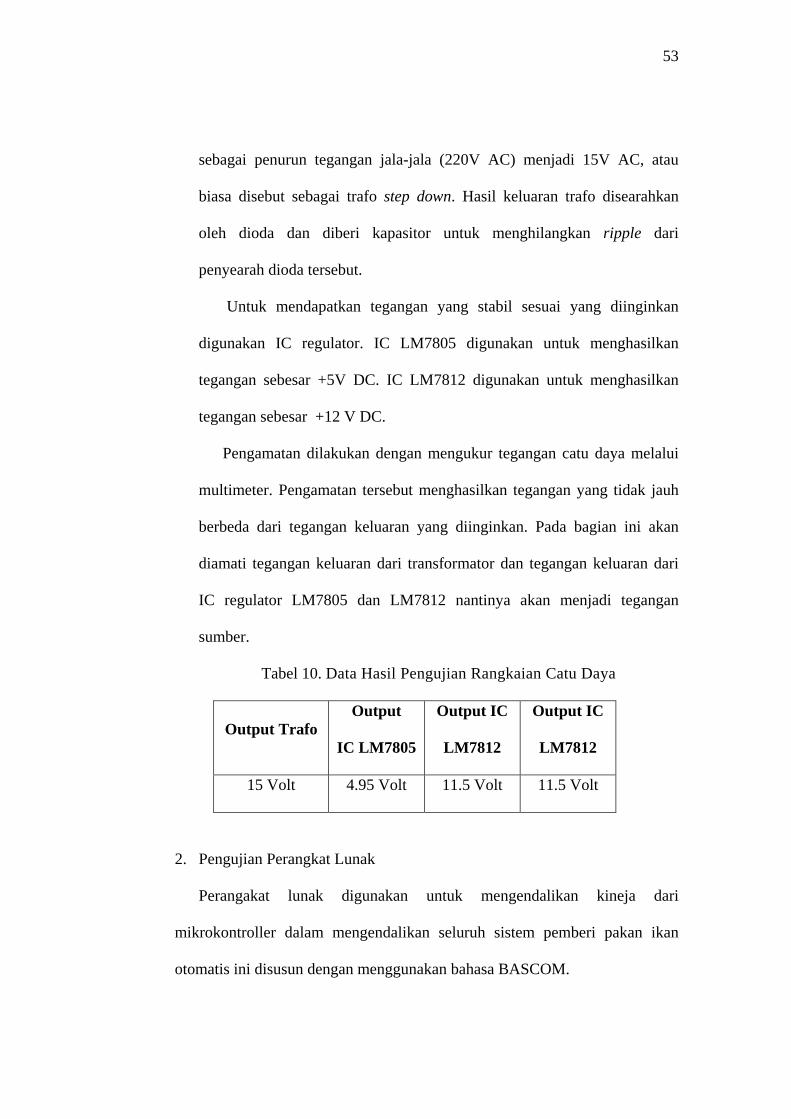
53
sebagai penurun tegangan jala-jala (220V AC) menjadi 15V AC, atau
biasa disebut sebagai trafo step down. Hasil keluaran trafo disearahkan
oleh dioda dan diberi kapasitor untuk menghilangkan ripple dari
penyearah dioda tersebut.
Untuk mendapatkan tegangan yang stabil sesuai yang diinginkan
digunakan IC regulator. IC LM7805 digunakan untuk menghasilkan
tegangan sebesar +5V DC. IC LM7812 digunakan untuk menghasilkan
tegangan sebesar +12 V DC.
Pengamatan dilakukan dengan mengukur tegangan catu daya melalui
multimeter. Pengamatan tersebut menghasilkan tegangan yang tidak jauh
berbeda dari tegangan keluaran yang diinginkan. Pada bagian ini akan
diamati tegangan keluaran dari transformator dan tegangan keluaran dari
IC regulator LM7805 dan LM7812 nantinya akan menjadi tegangan
sumber.
Tabel 10. Data Hasil Pengujian Rangkaian Catu Daya
Output Trafo Output
IC LM7805
Output IC
LM7812
Output IC
LM7812
15 Volt 4.95 Volt 11.5 Volt 11.5 Volt
2. Pengujian Perangkat Lunak
Perangakat lunak digunakan untuk mengendalikan kineja dari
mikrokontroller dalam mengendalikan seluruh sistem pemberi pakan ikan
otomatis ini disusun dengan menggunakan bahasa BASCOM.
54
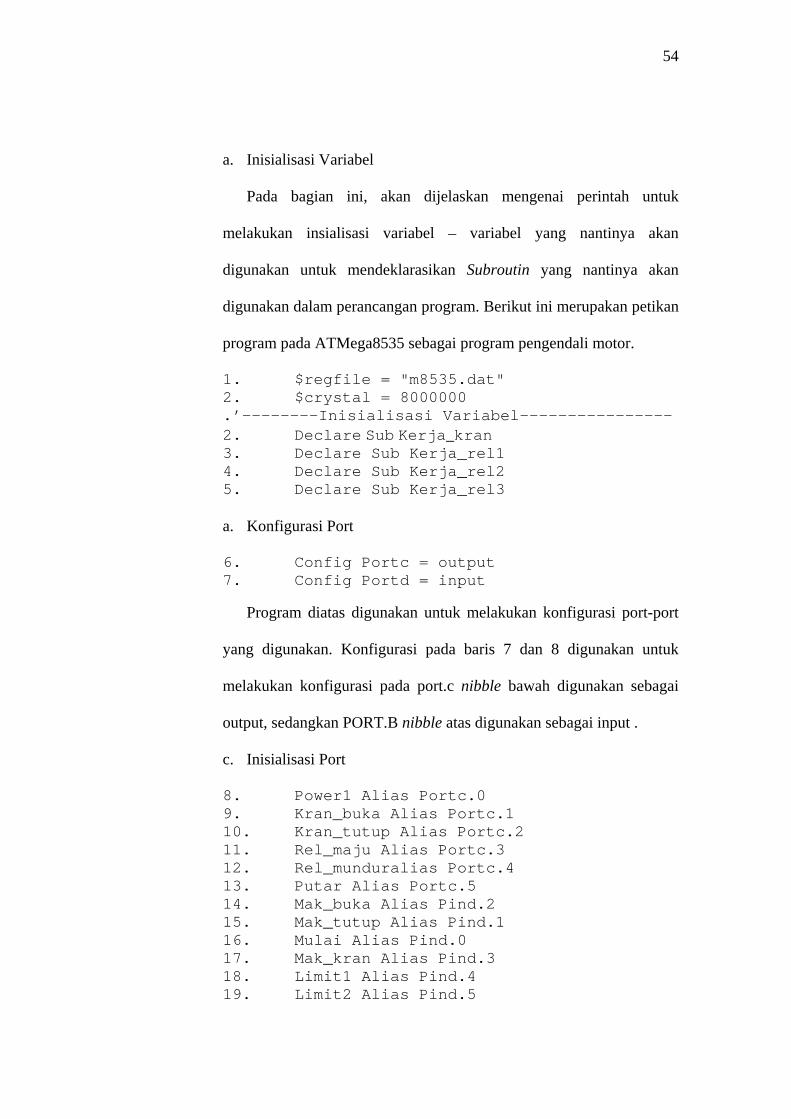
a. Inisialisasi Variabel
Pada bagian ini, akan dijelaskan mengenai perintah untuk
melakukan insialisasi variabel – variabel yang nantinya akan
digunakan untuk mendeklarasikan Subroutin yang nantinya akan
digunakan dalam perancangan program. Berikut ini merupakan petikan
program pada ATMega8535 sebagai program pengendali motor.
1. $regfile = "m8535.dat" 2. $crystal = 8000000 .’--------Inisialisasi Variabel---------------- 2. Declare Sub Kerja_kran 3. Declare Sub Kerja_rel1 4. Declare Sub Kerja_rel2 5. Declare Sub Kerja_rel3 a. Konfigurasi Port
6. Config Portc = output 7. Config Portd = input
Program diatas digunakan untuk melakukan konfigurasi port-port
yang digunakan. Konfigurasi pada baris 7 dan 8 digunakan untuk
melakukan konfigurasi pada port.c nibble bawah digunakan sebagai
output, sedangkan PORT.B nibble atas digunakan sebagai input .
c. Inisialisasi Port
8. Power1 Alias Portc.0 9. Kran_buka Alias Portc.1 10. Kran_tutup Alias Portc.2 11. Rel_maju Alias Portc.3 12. Rel_munduralias Portc.4 13. Putar Alias Portc.5 14. Mak_buka Alias Pind.2 15. Mak_tutup Alias Pind.1 16. Mulai Alias Pind.0 17. Mak_kran Alias Pind.3 18. Limit1 Alias Pind.4 19. Limit2 Alias Pind.5
55
20. Limit3 Alias Pind.6
Perintah diatas digunakan untuk melakukan inisialisai pada
masing–masing pin pada setiap port yang akan digunakan, sehingga
dapat memudahkan penggunaannya dalam program.
Sedangkan untuk inisialisasi variabel, konfigurasi port, dan
inisialisasi port pada ATMega8 yang digunakan untuk penyetingan
jam. Berikut ini merupakan petikannya.
d. Inisialisasi variabel
1. $regfile = "m8def.dat" 2. $crystal = 8000000 3. Declare Sub Hitung 4. Declare Sub Tampil 5. Dim Kondisi As Bit 6. Dim Detik_sat As Byte 7. Dim Detik_pul As Byte 8. Dim Menit_sat As Byte 9. Dim Menit_pul As Byte 10. Dim Jam_sat As Byte 11. Dim Jam_pul As Byte 12. Dim Cacah As Integer e. Konfigurasi port
13. Config Portd.0 = Input 14. Config Portd.1 = Input 15. Config Portd.3 = Input 16. Config Portd.4 = Input 17. Config Portd.5 = Output 18. Config Lcd = 16 * 2 19. Config Lcdpin = Pin , Db4 = Portc.2 ,
Db5 = Portc.3 , Db6 = Portc.4 , Db7 = Portc.5 , E = Portc.1 , Rs = Portc.0
20. Config Timer1 = Timer , Prescale = 64
56
f. Inisialisasi port
21. Set_detik Alias Pind.0 22. Set_menit Alias Pind.1 23. Set_jam Alias Pind.3 24. Enter Alias Pind.4
B. Pembahasan
Alat pemberi pakan ikan otomatis berbasis mikrokontroller ATMega8535
tersebut merupakan hasil perombakan dari alat pemberi pakan ikan yang
sudah ada dan diaplikasikan pada kolam ikan ataupun tambak ikan. Hasil dari
perancangan alat ini terdiri dari perangkat keras (Hardware) dan perangkat
lunak (Software).
Perangkat keras (Hardware) pada alat ini dibuat dengan system mekanik
yang terbuat dari lempeng besi setebal 1 mm dan menggunakan beberapa
komponen didalamnya yang terdiri dari perangkat input, perangkat
pengendali, dan perangkat output. Pada perangkat input terdiri dari beberapa
tombol Push Button yang dipasang dan digunakan untuk memasukkan input
ke mikrokontroller. Sedangkan pada bagian output system terdiri dari
rangkaian driver motor untuk menggerakkan system mekanik yaitu motor
power window 12 Volt.
Dalam proses kerjanya, alat ini dijalankan dengan bantuan program
mikrokontroller yaitu BASCOM AVR dan untuk menghubungkan ke
hardware nya digunakan program ponyprog 2000. Program mikrokontroller
ini (BASCOM AVR) mempunyai peranan penting sebagai penggerak system
57
jalannya kerja alat secara keseluruhan baik dalam penyetingan jam atau pun
dalam menggerakkan motor-motor pada sistem.
Proses kerja alat ini tergantung pada settingan waktu yang telah
ditentukan. Penyetingan waktu dikerjakan dengan memberi input pada
mikrokontroller dan dengan output berupa tampilan pada LCD. Setelah waktu
setting dikerjakan, maka dengan sendirinya alat tersebut akan bekerja sesuai
dengan setting waktu yang telah ditentukan.
Adapun mekanisme kerja dari alat ini yaitu, pada saat settingan waktu
yang dilakukan di awal telah sesuai dengan settingan jam yang ada pada
program maka pada kran pun akan membuka untuk mengeluarkan pelet pada
tampungan pertama (dalam hal ini adalah galon). Setelah terbuka nya kran
selama beberapa detik, maka pelet yang telah keluar akan ditampung
dipiringan. Kemudian kran pun akan tertutup hingga menyentuh batasan limit.
Motor pada rel akan menggerakkan piringan untuk berjalan dan akan berhenti
setelah limit1 tersentuh. Kemudian dilanjutkan untuk memutar piringan yang
berfungsi untuk menebarkan pellet pada media yang telah ada, seperti kolam
ataupun tambak ikan. Setelah tertebar dalam kurun waktu yang telah
ditentukan, maka piringan pun berhenti dan akan kembali menuju kran untuk
menampung pellet kembali. Proses ini akan berlangsung hingga 2 kali atau
sampai station ke 3.
Penggunaan motor power window sangatlah tepat untuk memutar as untuk
ulir yang berfungsi menggerakkan pelet (pakan ikan) dari tempat tampung.
Banyaknya pelet yang keluar tergantung dari lamanya motor tersebut berputar.

58
Alat pemberi pakan ikan otomatis ini memiliki keunggulan salah satu
diantaranya yaitu, mempermudah pemilik tambak atau kolam dalam
pemberian pakan untuk ikan-ikan nya. Pemilik hanya mengeset waktu nya
diawal saja, selanjutnya program yang akan mengeksekusi untuk menjalankan
proses yang ada didalamnya. Akan tetapi dibalik itu semua, otomasi pemberi
pakan ikan ini, masih memiliki kekurangan yaitu untuk tampilan jam pada
LCD yang terkadang tidak tampak. Walaupun tampilan jam yang ada tidak
muncul, proses yang lain tidak akan terpengaruh. Atau dengan kata lain proses
pemberi pakan ikan ini akan tetap bekerja secara normal. Jam digital pada alat
ini, hanya digunakan sebagai saklar saja.
BAB V
KESIMPULAN DAN SARAN
A. Kesimpulan
Setelah mengamati dan membahas Sistem Pemberi Pakan Ikan Otomatis
Berbasis Mikrokontroller ATMega8535 ini, sebagaimana telah dijelaskan
pada bab-bab sebelumnya maka dapat diambil beberapa kesimpulan yaitu :
1. Dalam pembuatan rancang bangun penebar pakan ikan otomatis berbasis
mikrokontroler ATMega8535 terdiri dari beberapa rangkaian yaitu:
a. Rangkaian catu daya.
b. Rangkaian driver relay (ULN2804A).
c. Rangkaian sistem minimum mikrokontroller ATMega8535.
d. Rangkaian sistem minimum mikrokontroller ATMega8.
2. Unjuk kerja dari alat pemberi pakan ikan otomatis berbasis
mikrokontroller ATMega8535 telah menunjukkan hasil sesuai dengan
yang diharapkan, yaitu :
a. Alat dapat menebarkan pakan ikan yang berupa pelet secara
otomatis jika setingan waktu yang ditentukan telah sesuai dengan
jam atau tampilan waktu pada LCD (Liquid Crystal Display) dalam
hal ini pukul 06.00 dan 16.00 .
b. Jika setingan waktu telah sesuai maka motor akan bekerja secara
otomatis. begitu, maka sistem ini pun akan bekerja untuk
60
menebarkan pakan ikan yang berlangsung selama 10 detik dengan
berat pelet yang tertebar ±250 gram.
B. Keterbatasan Alat
1. Alat ini akan bekerja ketika mendapatkan sumber listrik 220Volt, sehingga
bila terjadi gangguan seperti pemadaman listrik maka system pada alat ini
pun tidak akan bekerja sebagaimana mestinya. Selain itu juga settingan
waktunya pun harus dilakukan kembali karena system ini akan mereset
ulang saat terjadi gangguan (listrik padam).
2. Adanya selisih waktu pada tampilan LCD dengan jam yang sesungguhnya
akan menyebabkan ketidak akuratan jam.
3. Ukuran alat yang masih terbatas dengan spesifikasi panjang 2 m, lebar
0.5 m, serta tinggi 1.5 m hanya mampu melayani luasan kolam atau
tambak dengan 2 x 2 meter.
C. Saran-Saran
1. Jika memungkinkan gunakan sumber cadangan lain sebagai pengganti
ketika listrik dari PLN terjadi gangguan (pemadaman listrik secara tiba-
tiba), seperti genset.
2. Sebaiknya ukuran panjang serta tinggi rancang bangun prototype harus
menyesuaikan dengan area tambak ataupun kolam yang ada.
61
3. Untuk lebih menyempurnakan tampilan jam, sebaiknya menggunakan
RTC (Real Time Clock). Hal ini dimaksudkan agar jam pada tampilan
LCD akan sesuai dengan kondisi jam yang sesungguhnya.
DAFTAR PUSTAKA
Eko Putra, Agfianto.(2002). Belajar Mikrokontroler AT89C51/52/55. Yogyakarta:
Penerbit Gava Media. Foster, Bob. (2003). FISIKA SMU KELAS 3. Jakarta : Erlangga. Sukir,dkk.(2007). Pemberi Pakan Ikan Berbasis Mikrokontroller AT89S52.
Yogyakarta : Teknik Elektro, Fakultas Teknik Universitas Negeri Yogyakarta
Wahyudin, Didin.(2007). Belajar Mudah Mikrokontroller AT89s52 Dengan
Bahasa Basic Menggunakan Bascom M-8051. Malvino A.P, Ph. D., Barmawi M, Prof. Ph. D., Tjia M.O.,PH, 1992.Prinsip-
prinsip Elektronika Jilid 1 dan 2. Jakarta: Erlangga. Wardhana, Lingga.(2006). Belajar Sendiri Mikrokontroler AVR Seri
ATMega8535. Yogyakarta : Andi Offset. Wasito.(1986). Kumpulan Data Penting Komponen Elektronika. Jakarta:
Multimedia. (www.DatasheetCatalog.com) (www.delta-electronic.com) (www.elektroindonesia.com) (www.germes-online.com) (http://handyw.files.wordpress.com) (www.jonsanet.cjb.net) (www.made-in-china.com)
62
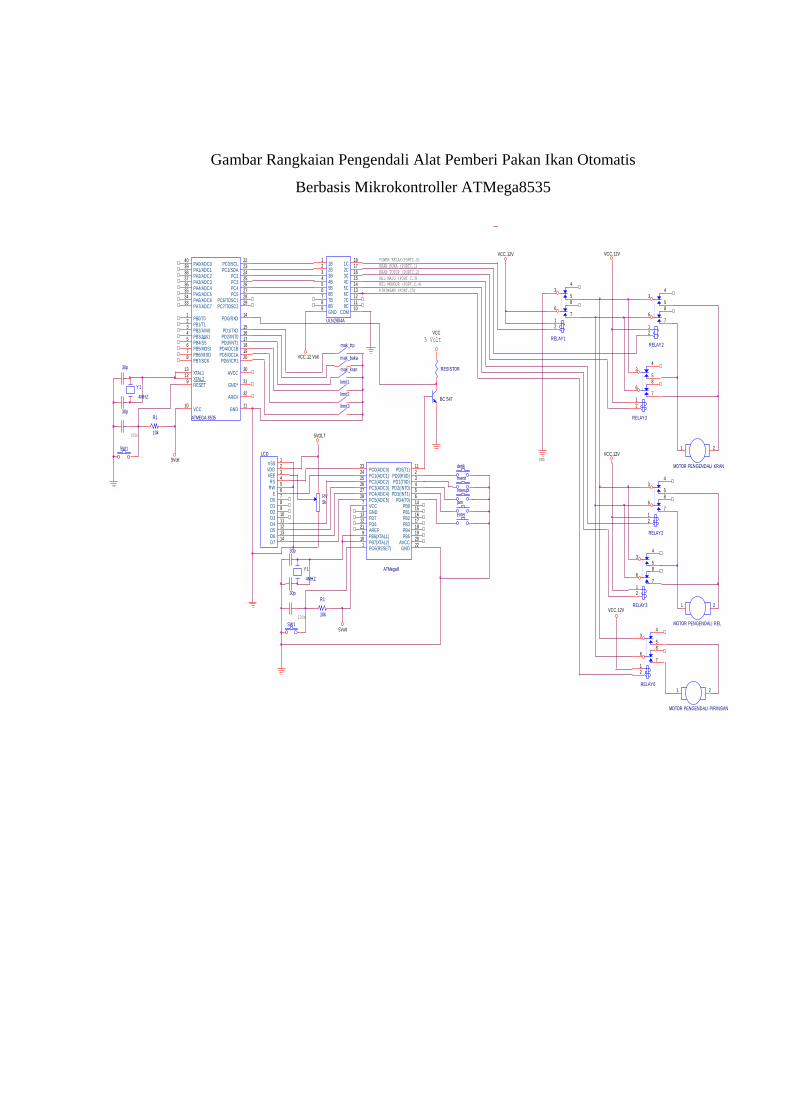
Gambar Rangkaian Pengendali Alat Pemberi Pakan Ikan Otomatis
Berbasis Mikrokontroller ATMega8535
mak_ttp
RELAY3
34
5
68
712
mak_kran
100n
GND
VCC.12 Volt
VCC.12V
RELAY1
34
5
68
712
jamRV5k
30p
30p
VCC.12V
RESISTOR
Y1
4MHZ
R1
10k
MOTOR PENGENDALI REL
1 2
5VoltLCD
13121110987
14
654321
D6D5D4D3D2D1D0
D7
ERWRS
VEEVDDVSS
RELAY2
34
5
68
712
interupt
100n
menit
ULN2804A
2345678
12
1413
15161718
1110
1
9
2B3B4B5B6B7B8B
7C
5C6C
4C3C2C1C
8CCOM
1B
GND
5VOLT
VCC
5Volt
POWER RELAY(PORTC.0)
limit3
detik
ATMega8
26
24 23456
27287
23
25
11
1415
1920
181716
22
81312219
101
PC3(ADC3)
PC1(ADC1) PD0(RXD)PD1(TXD)
PD2(INT0)PD3(INT1)
PD4(T0)PC4(ADC4)PC5(ADC5)VCC
PC0(ADC0)
PC2(ADC2)
PD5(T1)
PB0PB1
PB5AVCC
PB4PB3PB2
GND
GNDPD7PD6AREFPB6(XTAL1)PB7(XTAL2)PC6(RESET)
VCC.12V
RELAY6
34
5
68
712
KRAN BUKA (PORTC.1)
Y1
4MHZ
30p
30p
VCC.12V
KRAN TUTUP (PORTC.2)
limit1
5 Volt
MOTOR PENGENDALI KRAN
1 2
REL MAJU (PORT C.3)
R1
10k
enter
limit2
MOTOR PENGENDALI PIRINGAN
1 2
SW1
REL MUNDUR (PORT.C.4)
ATMEGA 8535
91213
11
30
31
32
10
2223242526272829
14
151617181920
12345678
4039383736353433
RESETXTAL2XTAL1
GND
AVCC
GND*
AREV
VCC
PC0/SCLPC1/SDA
PC2PC3PC4PC5
PC6/TOSC1PC7/TOSC2
PD0/RXD
PD1/TXDPD2/INT0PD3/INT1
PD4/OC1BPD5/OC1APD6/ICP1
PB0/T0PB1/T1PB2/AIN0PB3/AIN1PB4/SSPB5/MOSIPB6/MISOPB7/SCK
PA0/ADC0PA1/ADC1PA2/ADC2PA3/ADC3PA4/ADC4PA5/ADC5PA6/ADC6PA7/ADC7
RELAY3
34
5
68
712
RELAY2
34
5
68
712
mak_buka
SW1
PIRINGAN (PORT.C5)
BC 547
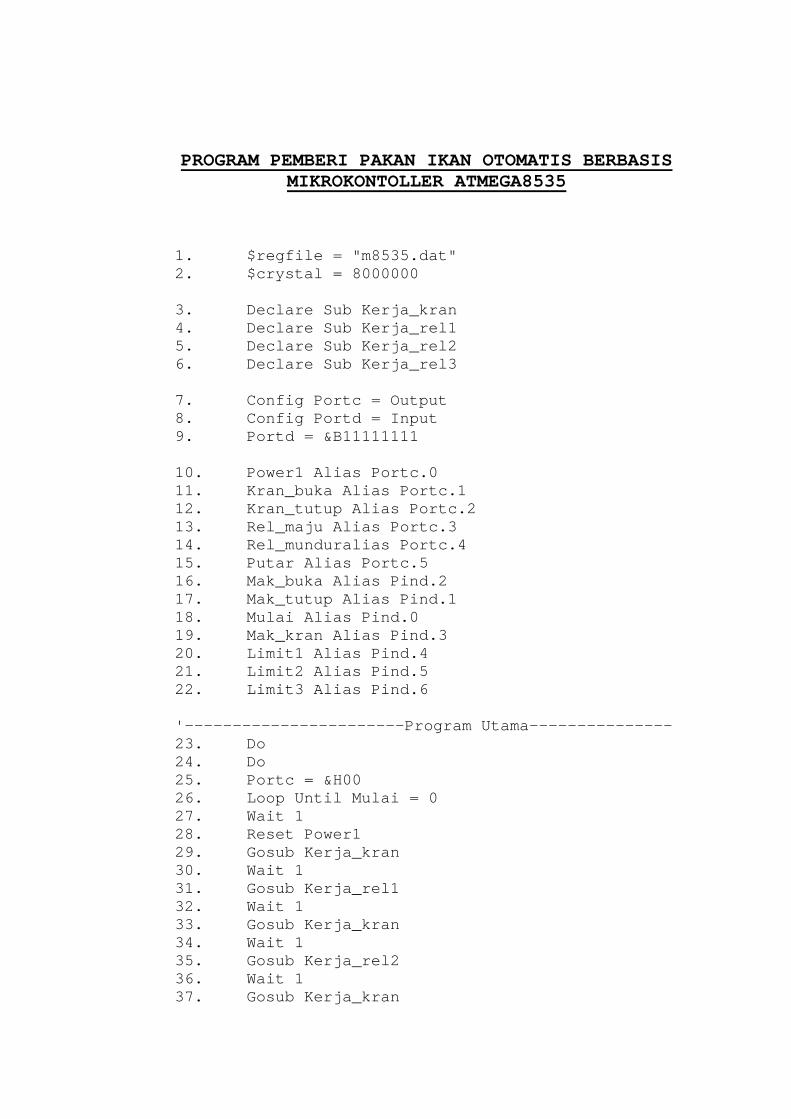
PROGRAM PEMBERI PAKAN IKAN OTOMATIS BERBASIS MIKROKONTOLLER ATMEGA8535
1. $regfile = "m8535.dat" 2. $crystal = 8000000
3. Declare Sub Kerja_kran 4. Declare Sub Kerja_rel1 5. Declare Sub Kerja_rel2 6. Declare Sub Kerja_rel3
7. Config Portc = Output 8. Config Portd = Input 9. Portd = &B11111111
10. Power1 Alias Portc.0 11. Kran_buka Alias Portc.1 12. Kran_tutup Alias Portc.2 13. Rel_maju Alias Portc.3 14. Rel_munduralias Portc.4 15. Putar Alias Portc.5 16. Mak_buka Alias Pind.2 17. Mak_tutup Alias Pind.1 18. Mulai Alias Pind.0 19. Mak_kran Alias Pind.3 20. Limit1 Alias Pind.4 21. Limit2 Alias Pind.5 22. Limit3 Alias Pind.6
'-----------------------Program Utama--------------- 23. Do 24. Do 25. Portc = &H00 26. Loop Until Mulai = 0 27. Wait 1 28. Reset Power1 29. Gosub Kerja_kran 30. Wait 1 31. Gosub Kerja_rel1 32. Wait 1 33. Gosub Kerja_kran 34. Wait 1 35. Gosub Kerja_rel2 36. Wait 1 37. Gosub Kerja_kran
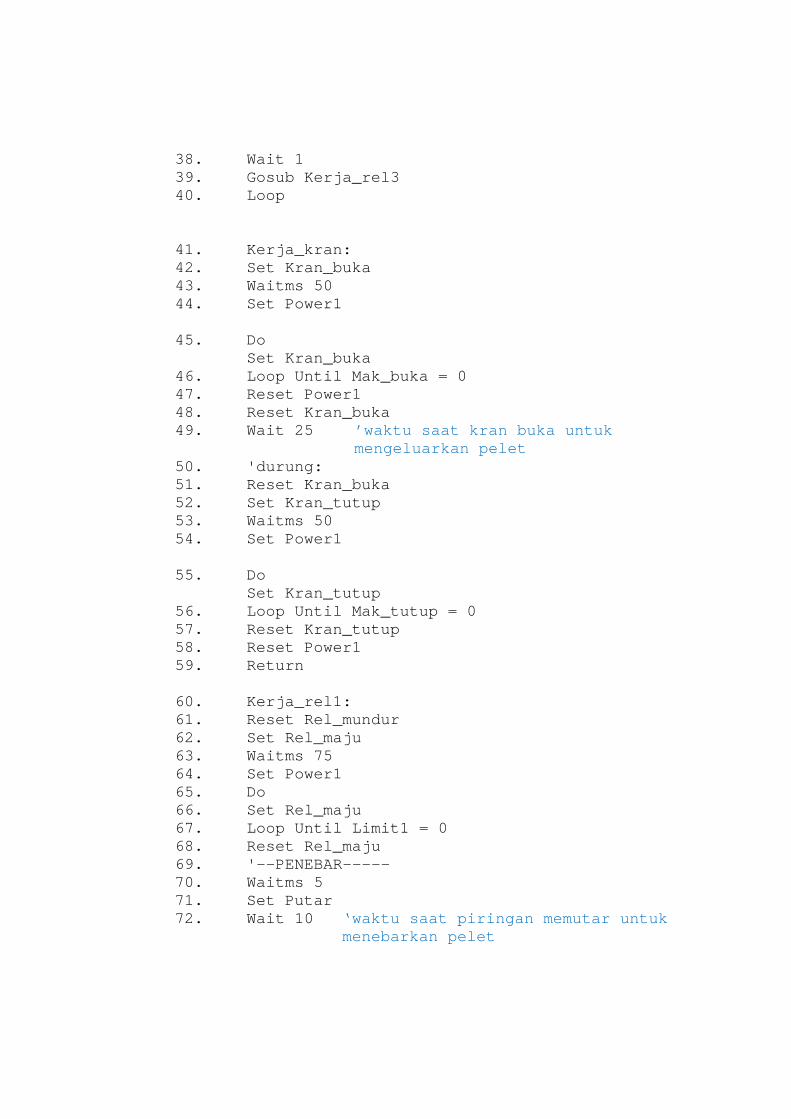
38. Wait 1 39. Gosub Kerja_rel3 40. Loop
41. Kerja_kran: 42. Set Kran_buka 43. Waitms 50 44. Set Power1
45. Do
Set Kran_buka 46. Loop Until Mak_buka = 0 47. Reset Power1 48. Reset Kran_buka 49. Wait 25 ’waktu saat kran buka untuk
mengeluarkan pelet 50. 'durung: 51. Reset Kran_buka 52. Set Kran_tutup 53. Waitms 50 54. Set Power1
55. Do
Set Kran_tutup 56. Loop Until Mak_tutup = 0 57. Reset Kran_tutup 58. Reset Power1 59. Return
60. Kerja_rel1: 61. Reset Rel_mundur 62. Set Rel_maju 63. Waitms 75 64. Set Power1 65. Do 66. Set Rel_maju 67. Loop Until Limit1 = 0 68. Reset Rel_maju 69. '--PENEBAR----- 70. Waitms 5 71. Set Putar 72. Wait 10 ‘waktu saat piringan memutar untuk
menebarkan pelet
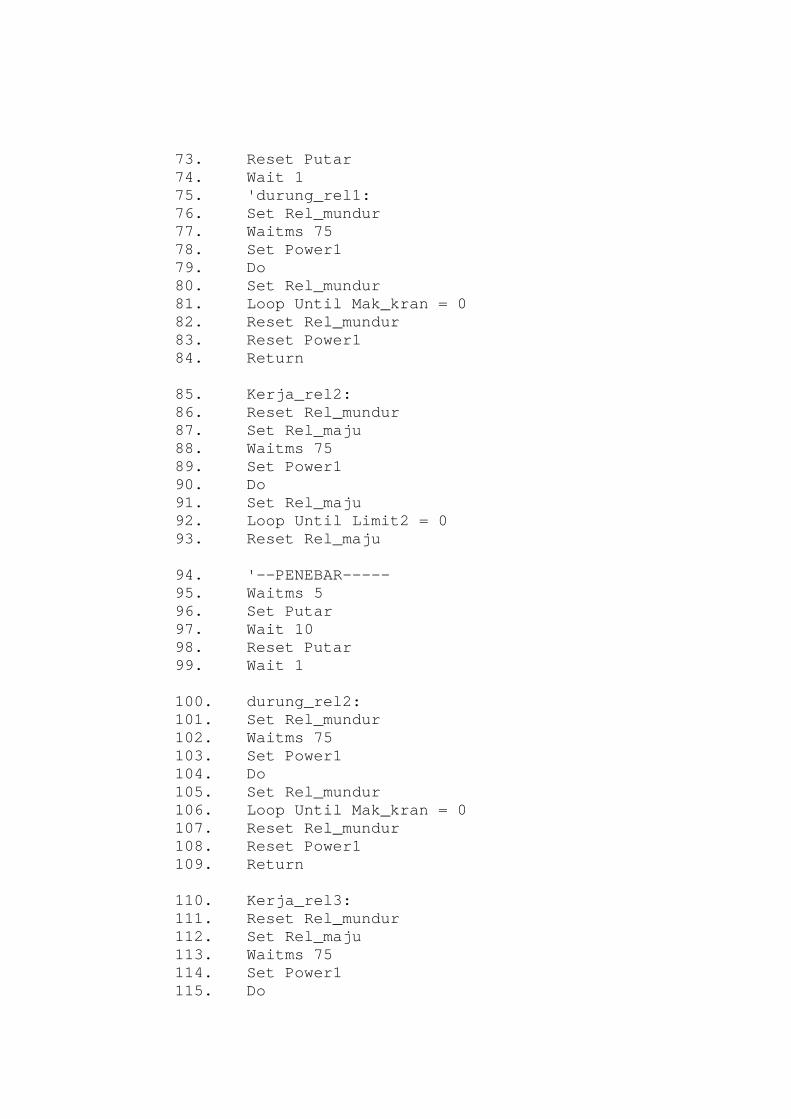
73. Reset Putar 74. Wait 1 75. 'durung_rel1: 76. Set Rel_mundur 77. Waitms 75 78. Set Power1 79. Do 80. Set Rel_mundur 81. Loop Until Mak_kran = 0 82. Reset Rel_mundur 83. Reset Power1 84. Return
85. Kerja_rel2: 86. Reset Rel_mundur 87. Set Rel_maju 88. Waitms 75 89. Set Power1 90. Do 91. Set Rel_maju 92. Loop Until Limit2 = 0 93. Reset Rel_maju 94. '--PENEBAR----- 95. Waitms 5 96. Set Putar 97. Wait 10 98. Reset Putar 99. Wait 1
100. durung_rel2: 101. Set Rel_mundur 102. Waitms 75 103. Set Power1 104. Do 105. Set Rel_mundur 106. Loop Until Mak_kran = 0 107. Reset Rel_mundur 108. Reset Power1 109. Return
110. Kerja_rel3: 111. Reset Rel_mundur 112. Set Rel_maju 113. Waitms 75 114. Set Power1 115. Do
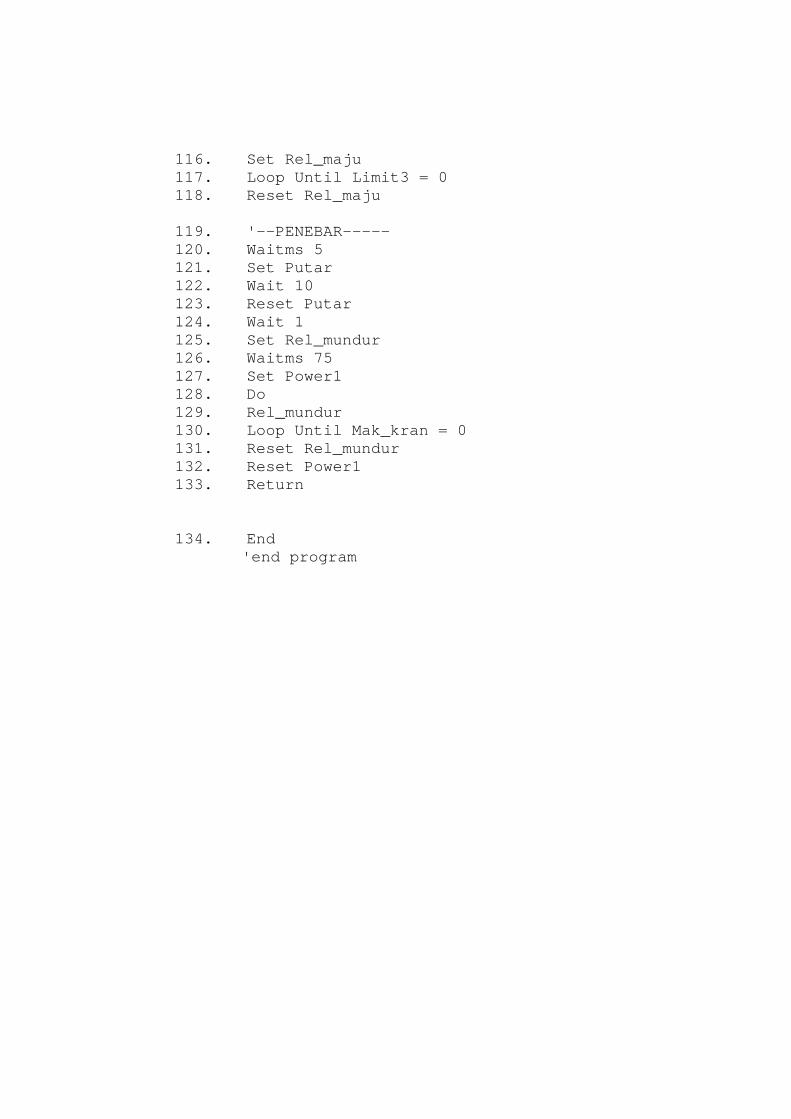
116. Set Rel_maju 117. Loop Until Limit3 = 0 118. Reset Rel_maju 119. '--PENEBAR----- 120. Waitms 5 121. Set Putar 122. Wait 10 123. Reset Putar 124. Wait 1 125. Set Rel_mundur 126. Waitms 75 127. Set Power1 128. Do 129. Rel_mundur 130. Loop Until Mak_kran = 0 131. Reset Rel_mundur 132. Reset Power1 133. Return
134. End 'end program
135. $regfile = "m8def.dat" 136. $crystal = 8000000
137. Declare Sub Hitung 138. Declare Sub Tampil
139. Dim Kondisi As Bit 140. Dim Detik_sat As Byte 141. Dim Detik_pul As Byte 142. Dim Menit_sat As Byte 143. Dim Menit_pul As Byte 144. Dim Jam_sat As Byte 145. Dim Jam_pul As Byte 146. Dim Cacah As Integer
147. Config Portd.0 = Input 148. Config Portd.1 = Input 149. Config Portd.3 = Input 150. Config Portd.4 = Input 151. Config Portd.5 = Output 152. Config Lcd = 16 * 2 153. Config Lcdpin = Pin , Db4 = Portc.2 , Db5 =
Portc.3 ,Db6 = Portc.4 , Db7 = Portc.5 ,E = Portc.1,Rs = Portc.0
154. Config Timer1 = Timer , Prescale = 64
155. Set_detik Alias Pind.0 156. Set_menit Alias Pind.1 157. Set_jam Alias Pind.3 158. Enter Alias Pind.4
159. Const Nilai_timer = 125000
'1detik = 31250 160. Timer1 = Nilai_timer 161. On Timer1 Timerover 162. Enable Timer1 163. Enable Interrupts 164. Enable Int0 165. On Int0 Seting_jam
166. Portd = 255 167. Set Portd.0 168. Set Portd.1 169. Set Portd.3 170. Set Portd.4 171. Reset Portd.5
172. Kondisi = 0
173. Cls 174. Locate 1 , 2 175. Lcd "Jam Digital" 176. Do 177. Gosub Hitung 178. Gosub Tampil 179. Loop
180. Tampil: 181. Locate 2 , 4 182. Lcd Jam_pul 183. Locate 2 , 5 184. Lcd Jam_sat 185. Locate 2 , 6 186. Lcd ":" 187. Locate 2 , 7 188. Lcd Menit_pul 189. Locate 2 , 8 190. Lcd Menit_sat 191. Locate 2 , 9 192. Lcd ":" 193. Locate 2 , 10 194. Lcd Detik_pul 195. Locate 2 , 11 196. Lcd Detik_sat
197. Return
198. Hitung: 199. If Detik_sat = 10 Then 200. Detik_sat = 0 201. Incr Detik_pul 202. End If
203. If Detik_pul = 6 Then 204. Detik_pul = 0 205. Incr Menit_sat 206. End If
207. If Menit_sat = 10 Then 208. Menit_sat = 0 209. Incr Menit_pul 210. End If 211. If Menit_pul = 6 Then 212. Menit_pul = 0
213. Incr Jam_sat 214. End If
215. If Jam_sat = 10 Then 216. Jam_sat = 0 217. Incr Jam_pul 218. End If
219. If Jam_pul = 2 And Jam_sat = 4 Then 220. Jam_sat = 0 221. Jam_pul = 0 222. End If
223. If Jam_pul = 0 And Jam_sat = 6 And Menit_pul = 0 And Menit_sat = 0 And Detik_pul = 0 And Detik_sat = 0 Then
224. Set Portd.5 225. Else
226. If Jam_pul = 1 And Jam_sat = 6 And Menit_pul
= 0 And Menit_sat = 0 And Detik_pul = 0 And Detik_sat = 0 Then
227. Set Portd.5 228. Else 229. Reset Portd.5
230. End If 231. End If 232. Return 233. Timerover: 234. Incr Cacah 235. If Cacah = 4 Then 236. Cacah = 0 237. Incr Detik_sat 238. End If 239. If Detik_sat = 10 Then 240. Detik_sat = 0 241. Incr Detik_pul 242. End If 243. Timer1 = Nilai_timer 244. Return
245. Seting_jam: 246. Stop Timer1 247. Do 248. If Set_detik = 0 Then
249. Incr Detik_sat 250. End If 251. If Set_menit = 0 Then 252. Incr Menit_sat 253. End If 254. If Set_jam = 0 Then 255. Incr Jam_sat 256. End If 257. Waitms 100 258. Gosub Hitung 259. Gosub Tampil 260. Loop Until Enter = 0 261. Start Timer1 262. Return 263. End 264. ’ End Program
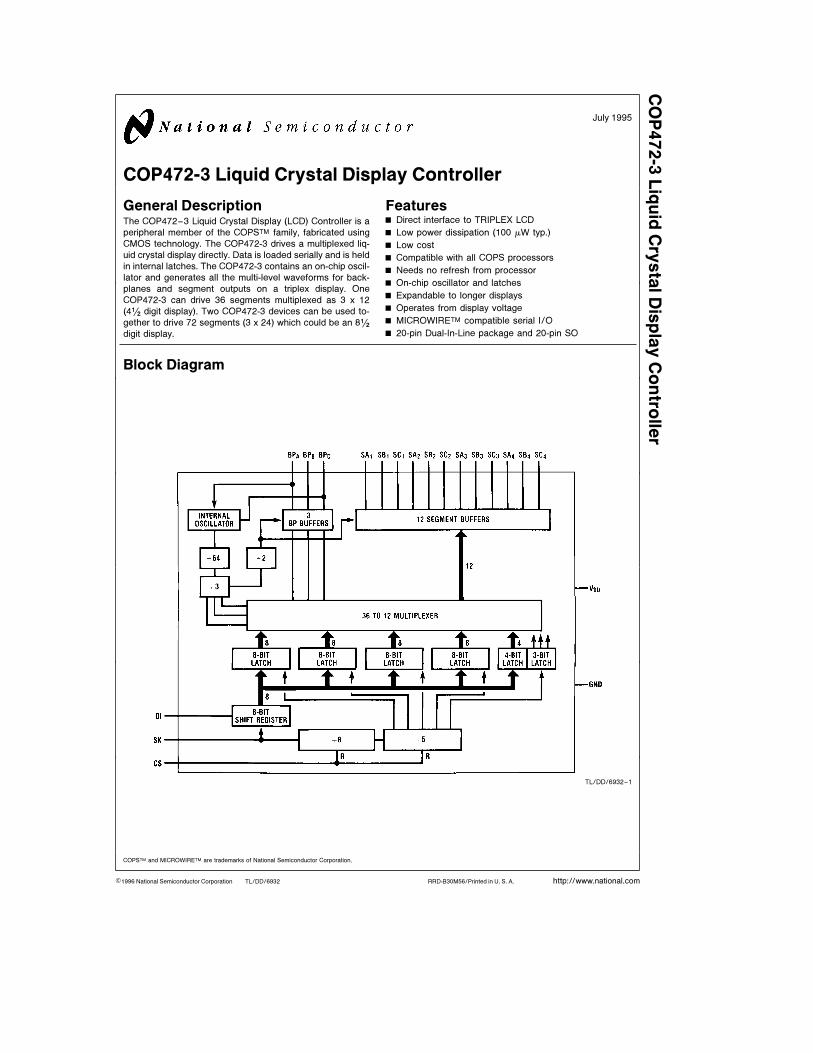
TL/DD/6932
CO
P472-3
Liq
uid
Cry
sta
lD
ispla
yC
ontro
ller
July 1995
COP472-3 Liquid Crystal Display Controller
General DescriptionThe COP472–3 Liquid Crystal Display (LCD) Controller is a
peripheral member of the COPSTM family, fabricated using
CMOS technology. The COP472-3 drives a multiplexed liq-
uid crystal display directly. Data is loaded serially and is held
in internal latches. The COP472-3 contains an on-chip oscil-
lator and generates all the multi-level waveforms for back-
planes and segment outputs on a triplex display. One
COP472-3 can drive 36 segments multiplexed as 3 x 12
(4(/2 digit display). Two COP472-3 devices can be used to-
gether to drive 72 segments (3 x 24) which could be an 8(/2
digit display.
FeaturesY Direct interface to TRIPLEX LCDY Low power dissipation (100 mW typ.)Y Low costY Compatible with all COPS processorsY Needs no refresh from processorY On-chip oscillator and latchesY Expandable to longer displaysY Operates from display voltageY MICROWIRETM compatible serial I/OY 20-pin Dual-In-Line package and 20-pin SO
Block Diagram
TL/DD/6932–1
COPSTM and MICROWIRETM are trademarks of National Semiconductor Corporation.
C1996 National Semiconductor Corporation RRD-B30M56/Printed in U. S. A. http://www.national.com
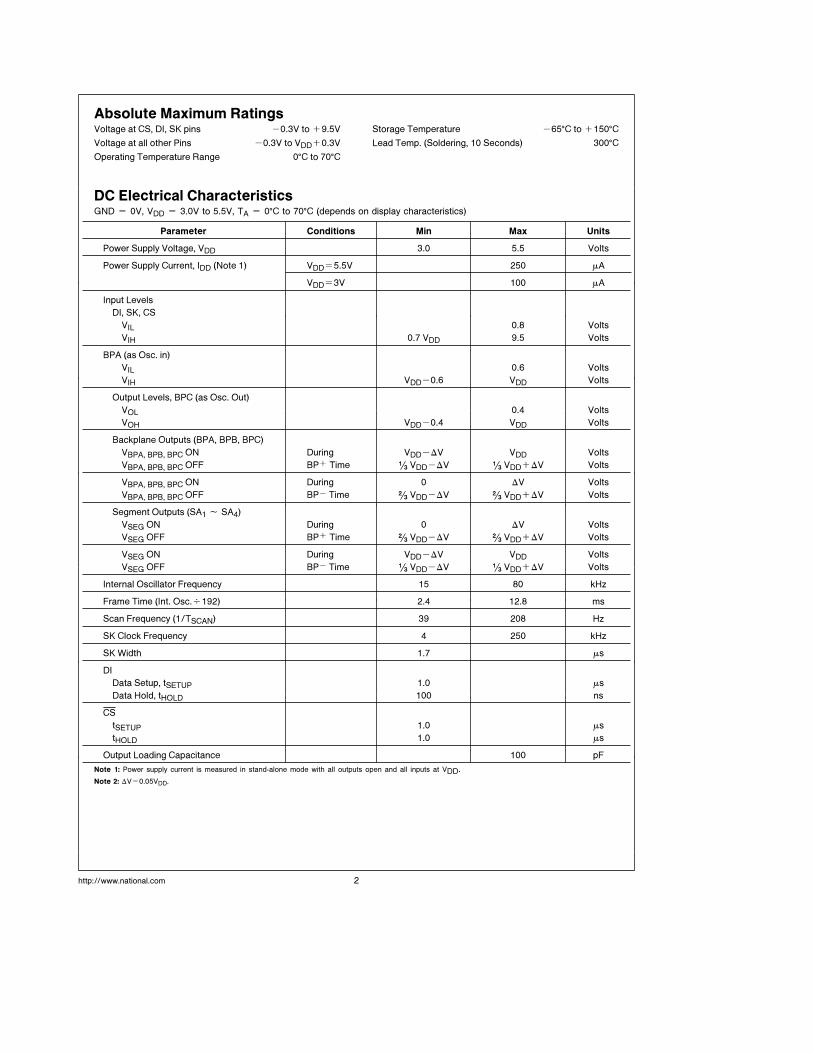
Absolute Maximum RatingsVoltage at CS, DI, SK pins b0.3V to a9.5V
Voltage at all other Pins b0.3V to VDDa0.3V
Operating Temperature Range 0§C to 70§C
Storage Temperature b65§C to a150§CLead Temp. (Soldering, 10 Seconds) 300§C
DC Electrical CharacteristicsGND e 0V, VDD e 3.0V to 5.5V, TA e 0§C to 70§C (depends on display characteristics)
Parameter Conditions Min Max Units
Power Supply Voltage, VDD 3.0 5.5 Volts
Power Supply Current, IDD (Note 1) VDDe5.5V 250 mA
VDDe3V 100 mA
Input Levels
DI, SK, CS
VIL 0.8 Volts
VIH 0.7 VDD 9.5 Volts
BPA (as Osc. in)
VIL 0.6 Volts
VIH VDDb0.6 VDD Volts
Output Levels, BPC (as Osc. Out)
VOL 0.4 Volts
VOH VDDb0.4 VDD Volts
Backplane Outputs (BPA, BPB, BPC)
VBPA, BPB, BPC ON During VDDbDV VDD Volts
VBPA, BPB, BPC OFF BPa Time (/3 VDDbDV (/3 VDDaDV Volts
VBPA, BPB, BPC ON During 0 DV Volts
VBPA, BPB, BPC OFF BPb Time )/3 VDDbDV )/3 VDDaDV Volts
Segment Outputs (SA1 E SA4)
VSEG ON During 0 DV Volts
VSEG OFF BPa Time )/3 VDDbDV )/3 VDDaDV Volts
VSEG ON During VDDbDV VDD Volts
VSEG OFF BPb Time (/3 VDDbDV (/3 VDDaDV Volts
Internal Oscillator Frequency 15 80 kHz
Frame Time (Int. Osc.d192) 2.4 12.8 ms
Scan Frequency (1/TSCAN) 39 208 Hz
SK Clock Frequency 4 250 kHz
SK Width 1.7 ms
DI
Data Setup, tSETUP 1.0 ms
Data Hold, tHOLD 100 ns
CS
tSETUP 1.0 ms
tHOLD 1.0 ms
Output Loading Capacitance 100 pF
Note 1: Power supply current is measured in stand-alone mode with all outputs open and all inputs at VDD.
Note 2: DVe0.05VDD.
http://www.national.com 2
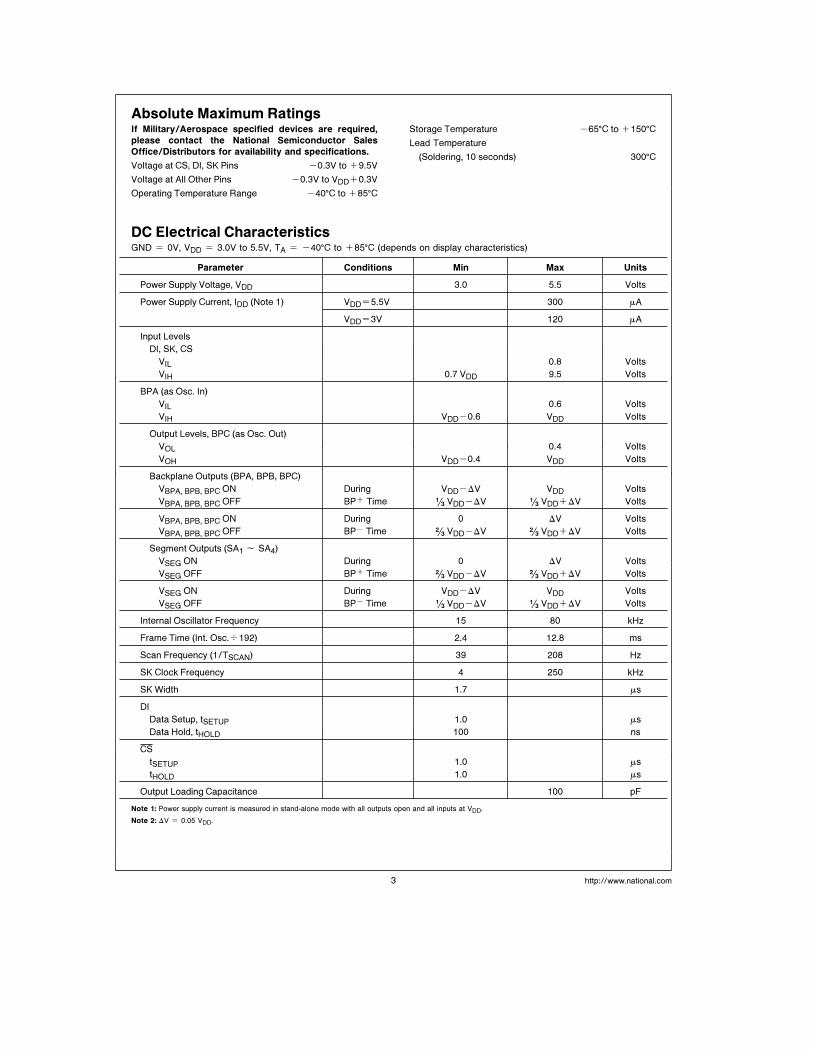
Absolute Maximum RatingsIf Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales
Office/Distributors for availability and specifications.
Voltage at CS, DI, SK Pins b0.3V to a9.5V
Voltage at All Other Pins b0.3V to VDDa0.3V
Operating Temperature Range b40§C to a85§C
Storage Temperature b65§C to a150§CLead Temperature
(Soldering, 10 seconds) 300§C
DC Electrical CharacteristicsGND e 0V, VDD e 3.0V to 5.5V, TA e b40§C to a85§C (depends on display characteristics)
Parameter Conditions Min Max Units
Power Supply Voltage, VDD 3.0 5.5 Volts
Power Supply Current, IDD (Note 1) VDDe5.5V 300 mA
VDDe3V 120 mA
Input Levels
DI, SK, CS
VIL 0.8 Volts
VIH 0.7 VDD 9.5 Volts
BPA (as Osc. In)
VIL 0.6 Volts
VIH VDDb0.6 VDD Volts
Output Levels, BPC (as Osc. Out)
VOL 0.4 Volts
VOH VDDb0.4 VDD Volts
Backplane Outputs (BPA, BPB, BPC)
VBPA, BPB, BPC ON During VDDbDV VDD Volts
VBPA, BPB, BPC OFF BPa Time (/3 VDDbDV (/3 VDDaDV Volts
VBPA, BPB, BPC ON During 0 DV Volts
VBPA, BPB, BPC OFF BPb Time )/3 VDDbDV )/3 VDDaDV Volts
Segment Outputs (SA1 E SA4)
VSEG ON During 0 DV Volts
VSEG OFF BPa Time )/3 VDDbDV )/3 VDDaDV Volts
VSEG ON During VDDbDV VDD Volts
VSEG OFF BPb Time (/3 VDDbDV (/3 VDDaDV Volts
Internal Oscillator Frequency 15 80 kHz
Frame Time (Int. Osc.d192) 2.4 12.8 ms
Scan Frequency (1/TSCAN) 39 208 Hz
SK Clock Frequency 4 250 kHz
SK Width 1.7 ms
DI
Data Setup, tSETUP 1.0 ms
Data Hold, tHOLD 100 ns
CS
tSETUP 1.0 ms
tHOLD 1.0 ms
Output Loading Capacitance 100 pF
Note 1: Power supply current is measured in stand-alone mode with all outputs open and all inputs at VDD.
Note 2: DV e 0.05 VDD.
http://www.national.com3
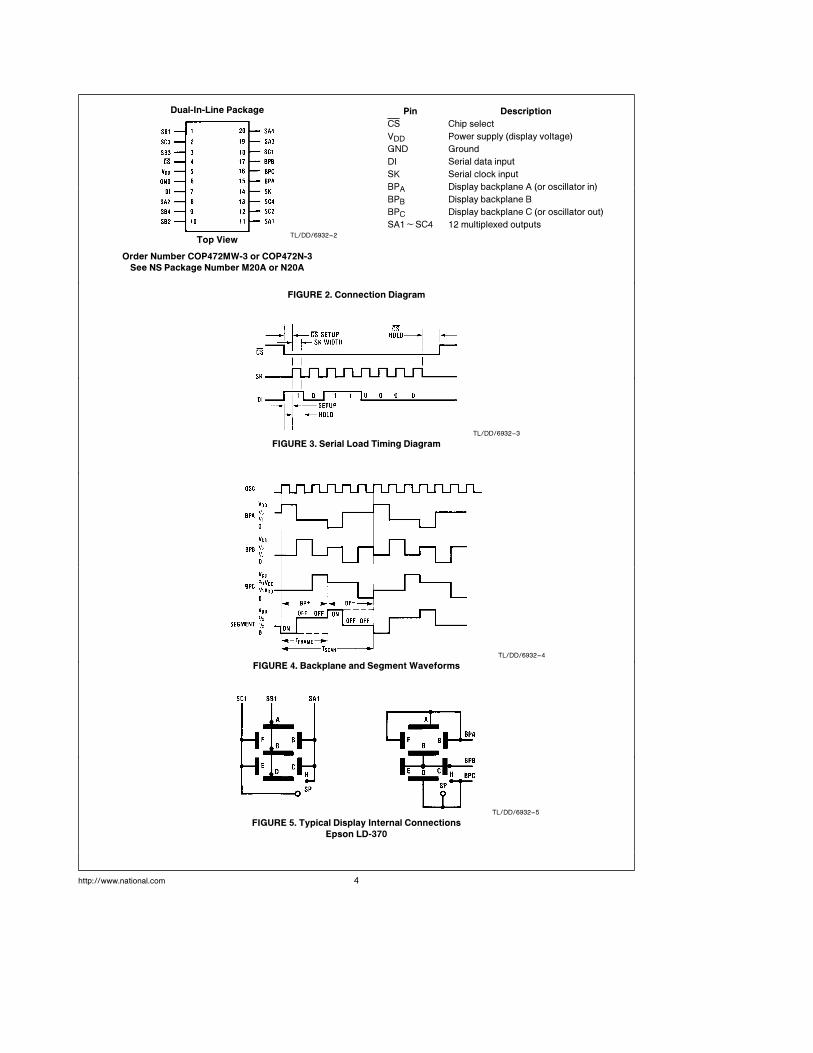
Dual-In-Line Package
TL/DD/6932–2Top View
Order Number COP472MW-3 or COP472N-3
See NS Package Number M20A or N20A
Pin Description
CS Chip select
VDD Power supply (display voltage)
GND Ground
DI Serial data input
SK Serial clock input
BPA Display backplane A (or oscillator in)
BPB Display backplane B
BPC Display backplane C (or oscillator out)
SA1ESC4 12 multiplexed outputs
FIGURE 2. Connection Diagram
TL/DD/6932–3
FIGURE 3. Serial Load Timing Diagram
TL/DD/6932–4
FIGURE 4. Backplane and Segment Waveforms
TL/DD/6932–5
FIGURE 5. Typical Display Internal Connections
Epson LD-370
http://www.national.com 4
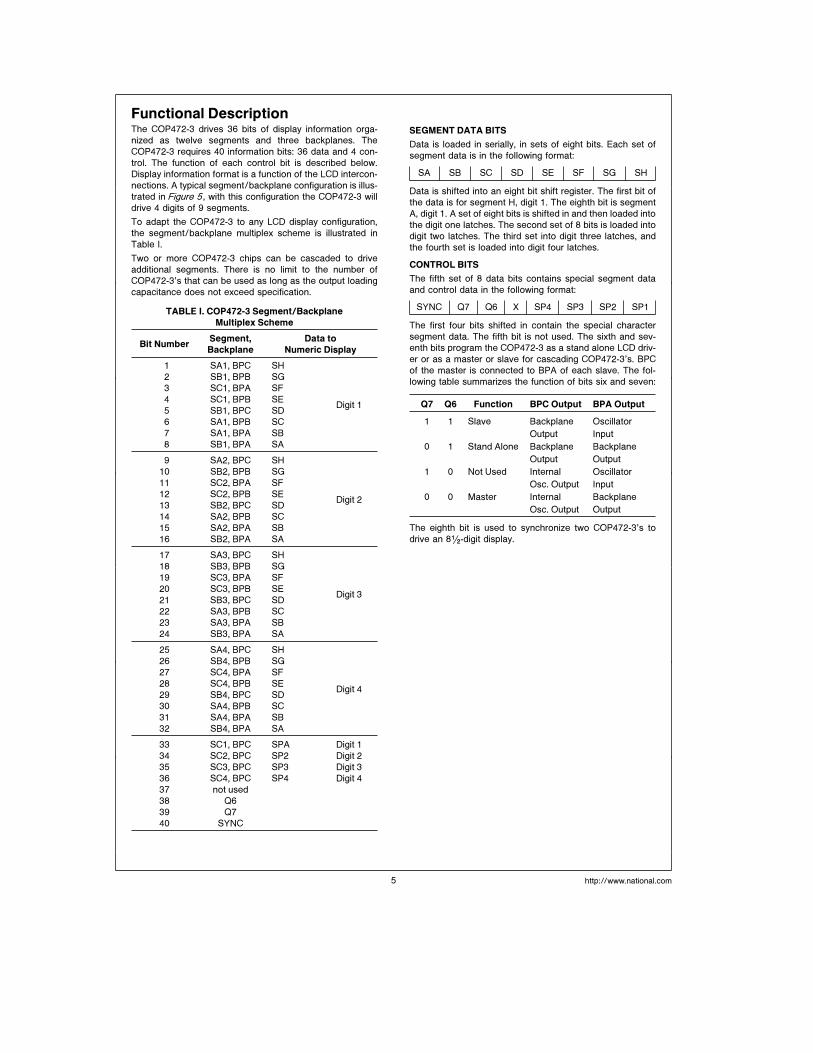
Functional DescriptionThe COP472-3 drives 36 bits of display information orga-
nized as twelve segments and three backplanes. The
COP472-3 requires 40 information bits: 36 data and 4 con-
trol. The function of each control bit is described below.
Display information format is a function of the LCD intercon-
nections. A typical segment/backplane configuration is illus-
trated in Figure 5, with this configuration the COP472-3 will
drive 4 digits of 9 segments.
To adapt the COP472-3 to any LCD display configuration,
the segment/backplane multiplex scheme is illustrated in
Table I.
Two or more COP472-3 chips can be cascaded to drive
additional segments. There is no limit to the number of
COP472-3’s that can be used as long as the output loading
capacitance does not exceed specification.
TABLE I. COP472-3 Segment/Backplane
Multiplex Scheme
Bit NumberSegment, Data to
Backplane Numeric Display
1 SA1, BPC SH
2 SB1, BPB SG
3 SC1, BPA SF
4 SC1, BPB SEDigit 1
5 SB1, BPC SD
6 SA1, BPB SC
7 SA1, BPA SB
8 SB1, BPA SA
9 SA2, BPC SH
10 SB2, BPB SG
11 SC2, BPA SF
12 SC2, BPB SEDigit 2
13 SB2, BPC SD
14 SA2, BPB SC
15 SA2, BPA SB
16 SB2, BPA SA
17 SA3, BPC SH
18 SB3, BPB SG
19 SC3, BPA SF
20 SC3, BPB SEDigit 3
21 SB3, BPC SD
22 SA3, BPB SC
23 SA3, BPA SB
24 SB3, BPA SA
25 SA4, BPC SH
26 SB4, BPB SG
27 SC4, BPA SF
28 SC4, BPB SEDigit 4
29 SB4, BPC SD
30 SA4, BPB SC
31 SA4, BPA SB
32 SB4, BPA SA
33 SC1, BPC SPA Digit 1
34 SC2, BPC SP2 Digit 2
35 SC3, BPC SP3 Digit 3
36 SC4, BPC SP4 Digit 4
37 not used
38 Q6
39 Q7
40 SYNC
SEGMENT DATA BITS
Data is loaded in serially, in sets of eight bits. Each set of
segment data is in the following format:
SA SB SC SD SE SF SG SH
Data is shifted into an eight bit shift register. The first bit of
the data is for segment H, digit 1. The eighth bit is segment
A, digit 1. A set of eight bits is shifted in and then loaded into
the digit one latches. The second set of 8 bits is loaded into
digit two latches. The third set into digit three latches, and
the fourth set is loaded into digit four latches.
CONTROL BITS
The fifth set of 8 data bits contains special segment data
and control data in the following format:
SYNC Q7 Q6 X SP4 SP3 SP2 SP1
The first four bits shifted in contain the special character
segment data. The fifth bit is not used. The sixth and sev-
enth bits program the COP472-3 as a stand alone LCD driv-
er or as a master or slave for cascading COP472-3’s. BPC
of the master is connected to BPA of each slave. The fol-
lowing table summarizes the function of bits six and seven:
Q7 Q6 Function BPC Output BPA Output
1 1 Slave Backplane Oscillator
Output Input
0 1 Stand Alone Backplane Backplane
Output Output
1 0 Not Used Internal Oscillator
Osc. Output Input
0 0 Master Internal Backplane
Osc. Output Output
The eighth bit is used to synchronize two COP472-3’s to
drive an 8(/2-digit display.
http://www.national.com5
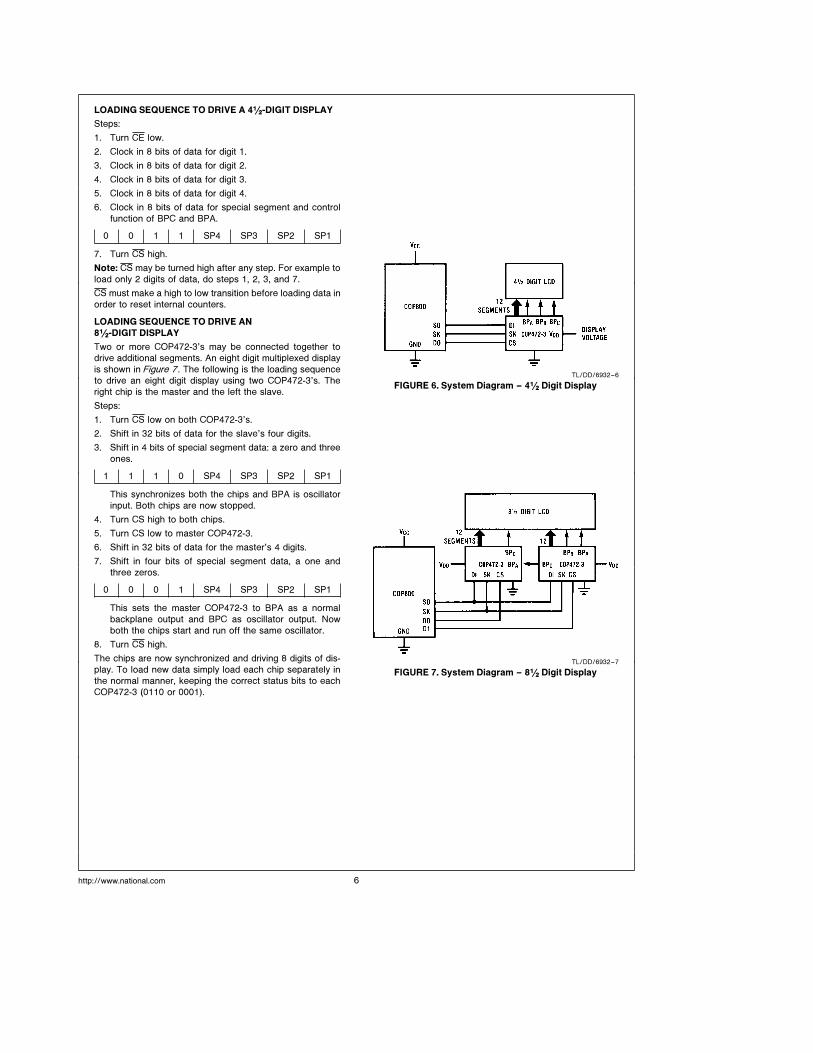
LOADING SEQUENCE TO DRIVE A 4(/2-DIGIT DISPLAY
Steps:
1. Turn CE low.
2. Clock in 8 bits of data for digit 1.
3. Clock in 8 bits of data for digit 2.
4. Clock in 8 bits of data for digit 3.
5. Clock in 8 bits of data for digit 4.
6. Clock in 8 bits of data for special segment and control
function of BPC and BPA.
0 0 1 1 SP4 SP3 SP2 SP1
7. Turn CS high.
Note: CS may be turned high after any step. For example to
load only 2 digits of data, do steps 1, 2, 3, and 7.
CS must make a high to low transition before loading data in
order to reset internal counters.
LOADING SEQUENCE TO DRIVE AN
8(/2-DIGIT DISPLAY
Two or more COP472-3’s may be connected together to
drive additional segments. An eight digit multiplexed display
is shown in Figure 7. The following is the loading sequence
to drive an eight digit display using two COP472-3’s. The
right chip is the master and the left the slave.
Steps:
1. Turn CS low on both COP472-3’s.
2. Shift in 32 bits of data for the slave’s four digits.
3. Shift in 4 bits of special segment data: a zero and three
ones.
1 1 1 0 SP4 SP3 SP2 SP1
This synchronizes both the chips and BPA is oscillator
input. Both chips are now stopped.
4. Turn CS high to both chips.
5. Turn CS low to master COP472-3.
6. Shift in 32 bits of data for the master’s 4 digits.
7. Shift in four bits of special segment data, a one and
three zeros.
0 0 0 1 SP4 SP3 SP2 SP1
This sets the master COP472-3 to BPA as a normal
backplane output and BPC as oscillator output. Now
both the chips start and run off the same oscillator.
8. Turn CS high.
The chips are now synchronized and driving 8 digits of dis-
play. To load new data simply load each chip separately in
the normal manner, keeping the correct status bits to each
COP472-3 (0110 or 0001).
TL/DD/6932–6
FIGURE 6. System Diagram – 4(/2 Digit Display
TL/DD/6932–7
FIGURE 7. System Diagram – 8(/2 Digit Display
http://www.national.com 6
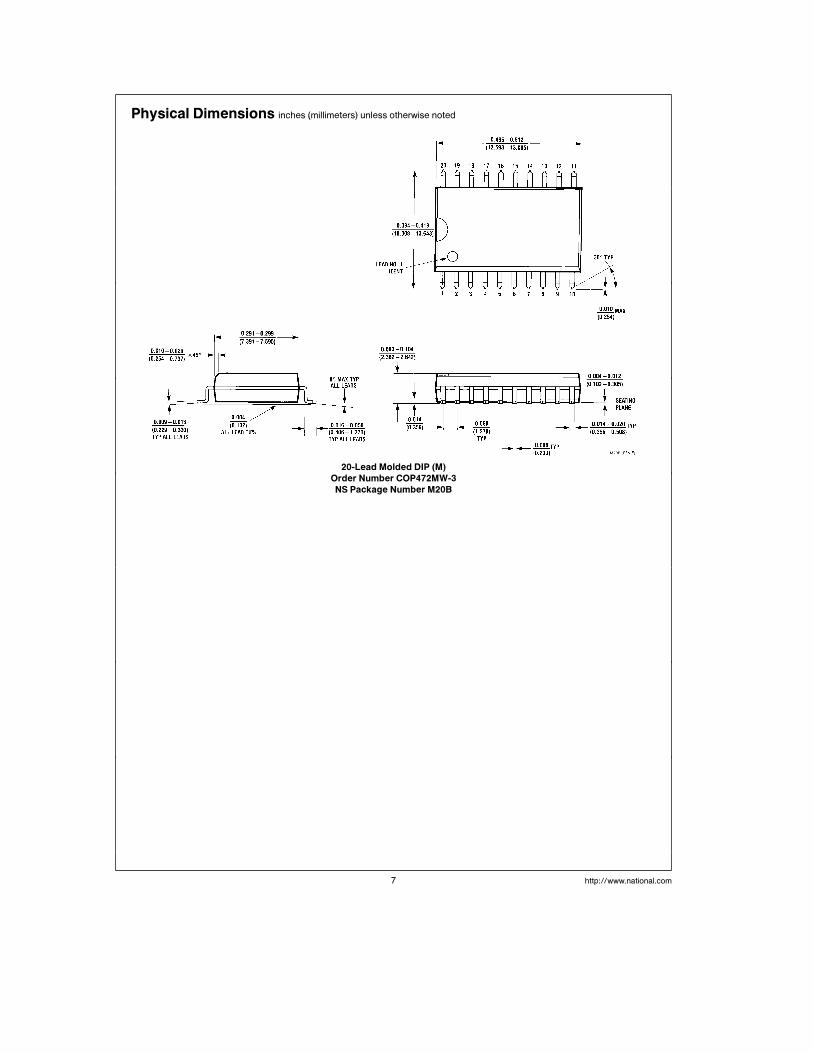
Physical Dimensions inches (millimeters) unless otherwise noted
20-Lead Molded DIP (M)
Order Number COP472MW-3
NS Package Number M20B
http://www.national.com7
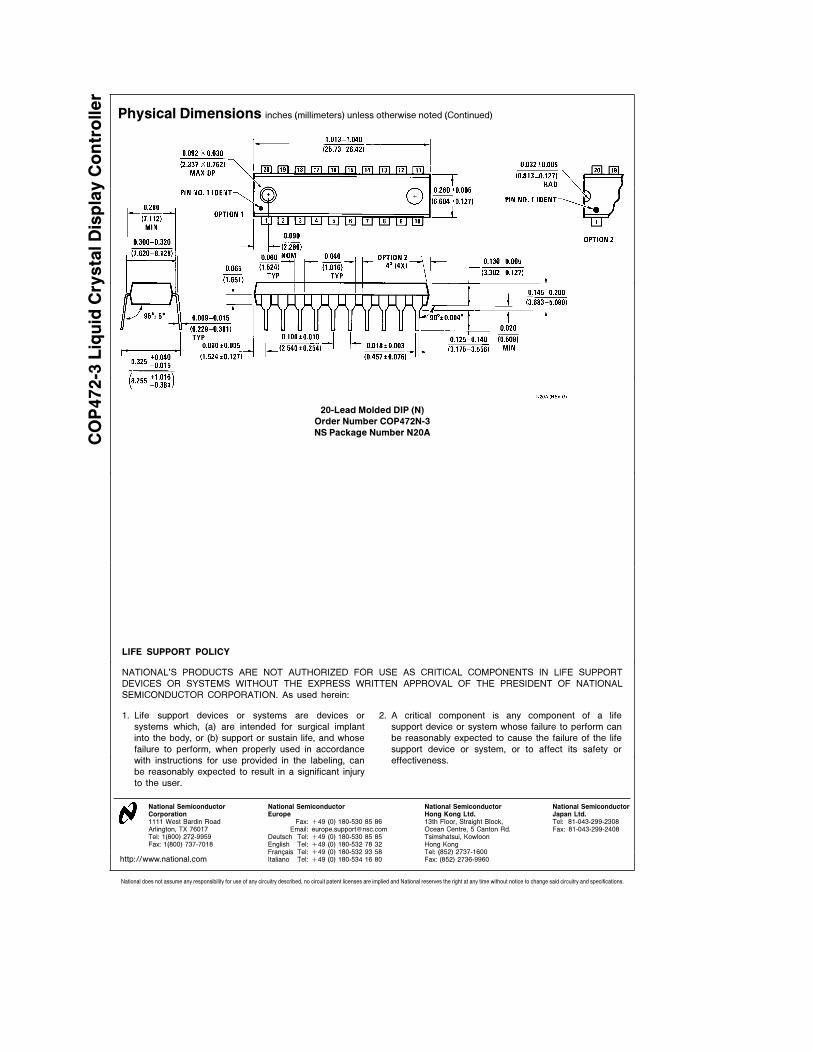
CO
P472-3
Liq
uid
Cry
sta
lD
ispla
yC
ontr
oller
Physical Dimensions inches (millimeters) unless otherwise noted (Continued)
20-Lead Molded DIP (N)
Order Number COP472N-3
NS Package Number N20A
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT
DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF NATIONAL
SEMICONDUCTOR CORPORATION. As used herein:
1. Life support devices or systems are devices or 2. A critical component is any component of a life
systems which, (a) are intended for surgical implant support device or system whose failure to perform can
into the body, or (b) support or sustain life, and whose be reasonably expected to cause the failure of the life
failure to perform, when properly used in accordance support device or system, or to affect its safety or
with instructions for use provided in the labeling, can effectiveness.
be reasonably expected to result in a significant injury
to the user.
National Semiconductor National Semiconductor National Semiconductor National SemiconductorCorporation Europe Hong Kong Ltd. Japan Ltd.1111 West Bardin Road Fax: a49 (0) 180-530 85 86 13th Floor, Straight Block, Tel: 81-043-299-2308Arlington, TX 76017 Email: [email protected] Ocean Centre, 5 Canton Rd. Fax: 81-043-299-2408Tel: 1(800) 272-9959 Deutsch Tel: a49 (0) 180-530 85 85 Tsimshatsui, KowloonFax: 1(800) 737-7018 English Tel: a49 (0) 180-532 78 32 Hong Kong
Fran3ais Tel: a49 (0) 180-532 93 58 Tel: (852) 2737-1600http://www.national.com Italiano Tel: a49 (0) 180-534 16 80 Fax: (852) 2736-9960
National does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and National reserves the right at any time without notice to change said circuitry and specifications.
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected] H1
MICRO-LIMIT SWITCHES
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected]
Free positionPosition of the switch actuator when no force isapplied.
Operating positionThe position of the actuator when the contact snaps.
Overtravel positionThe final position of the actuator.
Release positionThe position of the actuator when the contact snapsback from the operating position to original position.
Contact opening gapThe distance between the open contact pair.
PretravelThe distance between free and operating positions.
OvertravelThe distance the actuator travels after the contactactuates.
Movement differentialThe distance from the operating to release position ofthe actuator.
Free travelThe distance between the release and free positions.
Back travelThe distance between the overtravel and releasepositions.
Total travelThe sum of pretravel and overtravel.
Operating forceThe force required to cause snap action of contact.
End operating forceThe force to be applied to keep the actuator in theallowed final position.
Release forceThe force applied to the actuator at the moment thecontact snaps back from the operating position.
Differential forceThe difference between the operating force and therelease force.
Mechanical lifeThe minimum number of actuations with no load onthe switch.
Electrical lifeThe minimum number of actuations at rated voltage,rated current and resistive load at 20°C ambienttemperature.
FORCE vs.TRAVELDIAGRAM
1 free position2 operating position3 overtravel position4 release position
A total travelB free travelC back travelD pretravelE overtravelF movement differential
I total forceII operating forceIII differential forceIV release force
DEFINITIONS OF TERMS
MICRO-LIMIT SWITCHESMicro-limit pushbutton switches are used in many applications including microwave ovens,vending machines, copy and fax machines, medical and security equipment, computer peripheralsand many others. They are characterized by close tolerance precision switching positions and longservice life. APEM micro-limit switches are 100% electronic tested prior to shipment to insureproper operation and conformance with specifications.
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected] H3
MA SERIES - MICRO-LIMIT SWITCHES
AGENCY RECOGNITION Approval pending.
FEATURES
Ratings: 16 Amps 250 VAC (resistive load). 4 Amps 250 VAC (motor load) or3 Amps 250 VAC (resistive load). 0.1 Amps 250 VAC (motor load).
Single pole CO (change-over or alternate action), NC (normally closed momentary) and NO (normally open momentary) configurations.
Close tolerance switching action with long life (10,000,000 mechanical cycles min.).
Pin plunger, hinge lever or roller lever actuator options.
MATERIALSContacts: Stationary: Nicker silver Shorting: Beryllium copperActuator: FS 161 (UL94V-O)Case & cover: PBT (UL94V-O)Terminals: Silver plated copper/zinc
SPECIFICATIONS
Operating force: ≤ 12.59 oz. (343 grams) approx. for 16 Amp models
≤ 0.72 oz. (20 grams) approx. for 3 Amp models
Pretravel: ≤ .047" (1.2mm)
Overtravel: ≥ .059" (1.5mm) min.
Movement differential: ≤ .016" (0.4mm)
Free position: ≤ .649" (16.5mm)
Operating position: .578" ± .020" (14.7mm ± 0.5mm)
Operating temperature: -40°C to +85°CContact gap: less than .118" (3mm)
Tracking resistance: > PTI 175
NRTL
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected]
MA SERIES - MICRO-LIMIT SWITCHES
ORDER FORMAT M A A 6 B
Series Circuit & quick-connect terminals Switch rating Actuator style
MA A Normally open (standard) .031 x .248" (0.8x6.3mm) 6 16(4)A 250 VAC A Pin actuatorB Normally closed (standard) .031 x .248" (0.8x6.3mm) 7 3(0.1)A 250 VAC B Hinge actuatorC Change-over (standard) .031 x .248" (0.8x6.3mm) C Roller actuatorD Normally open, .031 x .248" (0.8x6.3mm), spacing .197" (5mm)E Normally closed, .031 x .248" (0.8x6.3mm), spacing .197" (5mm)F Change-over, .031 x .248" (0.8x6.3mm), spacing .197" (5mm)G Normally open, .020 x .189" (0.5x4.8mm)H Normally closed, .020 x .189" (0.5x4.8mm)I Change-over, .020 x .189" (0.5x4.8mm)J Normally open, .031 x .189" (0.8x4.8mm)K Normally closed, .031 x .189" (0.8x4.8mm)L Change-over, .031 x .189" (0.8x4.8mm)
STANDARD MODELS
Quick-connect .031x.248" .031x.248" .020x.189" .031x.189"terminal (0.8x6.3mm) (0.8x6.3mm) (0.5x4.8mm) (0.8x4.8mm)
pin spacing -.197"(5mm)
Switching capacity 16(4)A 3(0.1)A 16(4)A 16(4)A 3(0.1)A 16(4)A 3(0.1)A
Pin plunger NO MAA6A MAA7A MAD6A MAG6A MAG7A MAJ6A MAJ7ANC MAB6A MAB7A MAE6A MAH6A MAH7A MAK6A MAK7ACO MAC6A MAC7A MAF6A MAI6A MAI7A MAL6A MAL7A
Hinge lever NO MAA6B - MAD6B MAG6B - MAJ6B -NC MAB6B - MAE6B MAH6B - MAK6B -CO MAC6B - MAF6B MAI6B - MAL6B -
Roller lever NO MAA6C - MAD6C MAG6C - MAJ6C -NC MAB6C - MAE6C MAH6C - MAK6C -CO MAC6C - MAF6C MAI6C - MAL6C -
NO =NORMALLY OPEN:
COM (1)
NO (4)
NC =NORMALLY CLOSED:
NC (2)
COM (1)
CO =CHANGE-OVER:
NC (2)
COM (1)
NO (4)
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected] H5
MA SERIES - MICRO-LIMIT SWITCHES
MECHANICAL OUTLINES
Models with quick-connect terminal .031x.248" (0.8x6.3mm)
Hinge lever Roller lever
Side view Normally closed Quick-connect terminal
Normally open Change-over
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected]
MA SERIES - MICRO-LIMIT SWITCHES
MECHANICAL OUTLINES
Models with quick-connect terminal .031x.248" (0.8x6.3mm) & pin spacing .197" (5mm)
Roller lever Adaptor element
Normally open Change-over
Hinge lever
Side view Normally closed Quick-connect terminal
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected] H7
MA SERIES - MICRO-LIMIT SWITCHES
MECHANICAL OUTLINES
Models with quick-connect terminal .020 or .031x.248" (0.8 or 0.8x6.3mm)
Normally closed
Hinge lever Roller lever
Normally open Change-over
Side view Quick connect terminal
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected]
MB SERIES - MICRO-LIMIT SWITCHES
AGENCY RECOGNITION
FEATURES
Ratings: 10 Amps 250 VAC (resistive load). 1.5 Amps 250 VAC (motor load).
Single pole CO (change-over or alternate action), NC (normally closed momentary) and NO (normally open momentary) configurations.
Close tolerance switching action with long life (10,000,000 mechanical cycles min.).
Pin plunger, hinge lever or roller lever actuator options.
MATERIALSContacts: Stationary: Nickel silver Shorting: Beryllium copperActuator: POM (UL94HB)Case & cover: PBT (UL94V-O)Terminals: Silver plated copper/zinc
SPECIFICATIONS
Operating force: ≤ 10 oz. (274 grams) approx.
Pretravel: ≤ .039" (1mm)
Overtravel: ≥ .024" (0.6mm)
Movement differential: ≤ .005" (0.13mm)
Free position: ≤ .366" (9.3mm)
Operating position: .331" ± .012" (8.4mm ± (0.3mm)
Operating temperature: -40°C to +85°CContact gap: < .118" (3mm)
Tracking resistance: >PTI 175
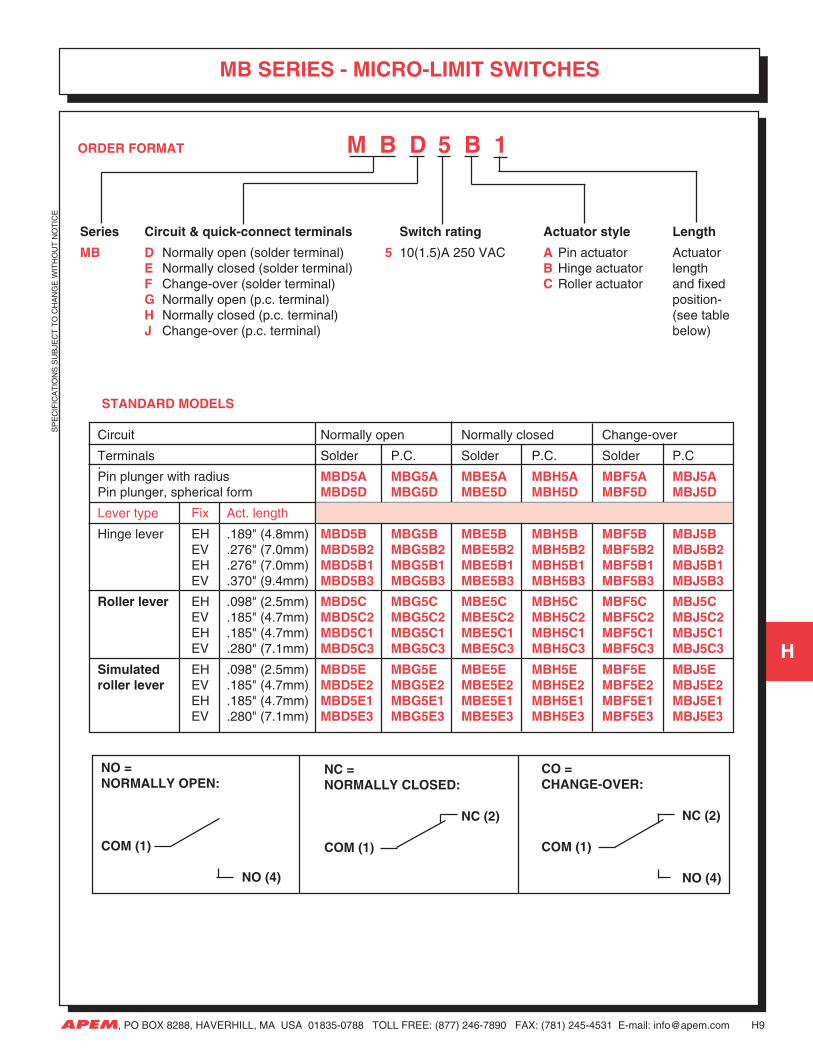
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected] H9
MB SERIES - MICRO-LIMIT SWITCHES
ORDER FORMAT M B D 5 B 1
Series Circuit & quick-connect terminals Switch rating Actuator style Length
MB D Normally open (solder terminal) 5 10(1.5)A 250 VAC A Pin actuator ActuatorE Normally closed (solder terminal) B Hinge actuator lengthF Change-over (solder terminal) C Roller actuator and fixedG Normally open (p.c. terminal) position-H Normally closed (p.c. terminal) (see tableJ Change-over (p.c. terminal) below)
STANDARD MODELS
Circuit Normally open Normally closed Change-over
Terminals Solder P.C. Solder P.C. Solder P.C.Pin plunger with radius MBD5A MBG5A MBE5A MBH5A MBF5A MBJ5APin plunger, spherical form MBD5D MBG5D MBE5D MBH5D MBF5D MBJ5D
Lever type Fix Act. length
Hinge lever EH .189" (4.8mm) MBD5B MBG5B MBE5B MBH5B MBF5B MBJ5BEV .276" (7.0mm) MBD5B2 MBG5B2 MBE5B2 MBH5B2 MBF5B2 MBJ5B2EH .276" (7.0mm) MBD5B1 MBG5B1 MBE5B1 MBH5B1 MBF5B1 MBJ5B1EV .370" (9.4mm) MBD5B3 MBG5B3 MBE5B3 MBH5B3 MBF5B3 MBJ5B3
Roller lever EH .098" (2.5mm) MBD5C MBG5C MBE5C MBH5C MBF5C MBJ5CEV .185" (4.7mm) MBD5C2 MBG5C2 MBE5C2 MBH5C2 MBF5C2 MBJ5C2EH .185" (4.7mm) MBD5C1 MBG5C1 MBE5C1 MBH5C1 MBF5C1 MBJ5C1EV .280" (7.1mm) MBD5C3 MBG5C3 MBE5C3 MBH5C3 MBF5C3 MBJ5C3
Simulated EH .098" (2.5mm) MBD5E MBG5E MBE5E MBH5E MBF5E MBJ5Eroller lever EV .185" (4.7mm) MBD5E2 MBG5E2 MBE5E2 MBH5E2 MBF5E2 MBJ5E2
EH .185" (4.7mm) MBD5E1 MBG5E1 MBE5E1 MBH5E1 MBF5E1 MBJ5E1EV .280" (7.1mm) MBD5E3 MBG5E3 MBE5E3 MBH5E3 MBF5E3 MBJ5E3
NO =NORMALLY OPEN:
COM (1)
NO (4)
NC =NORMALLY CLOSED:
NC (2)
COM (1)
CO =CHANGE-OVER:
NC (2)
COM (1)
NO (4)
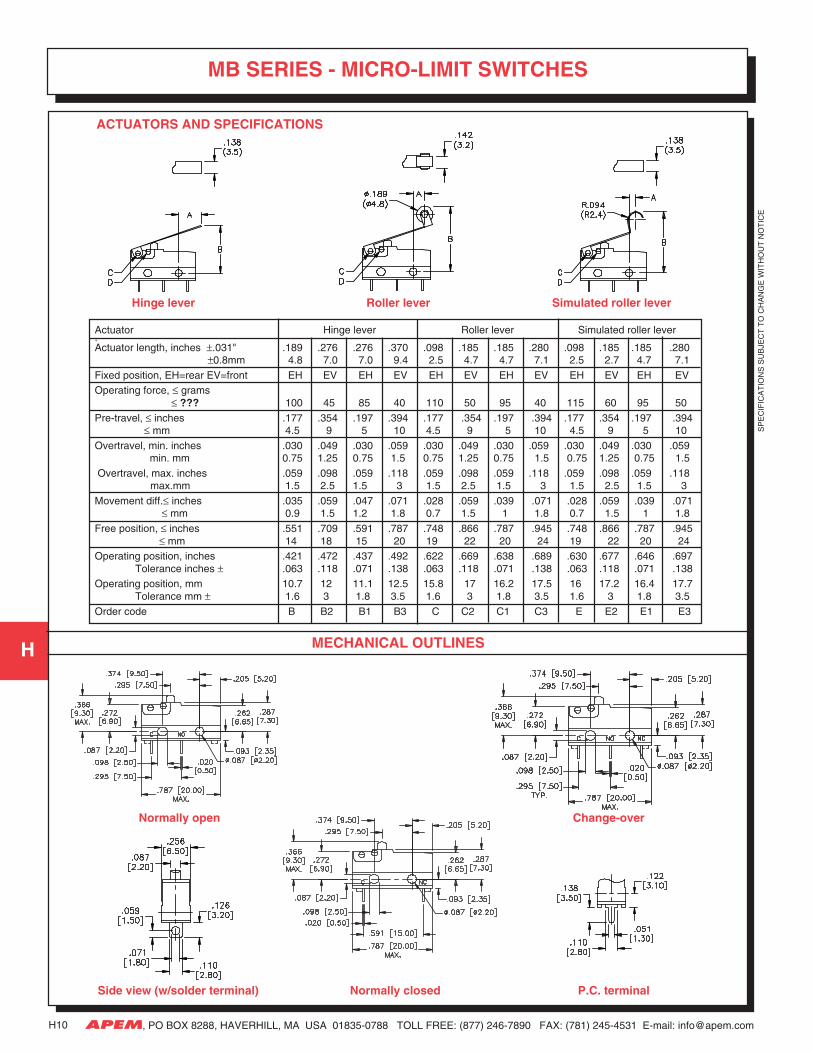
SP
EC
IFIC
AT
ION
S S
UB
JEC
T T
O C
HA
NG
E W
ITH
OU
T N
OT
ICE
H
APEM, PO BOX 8288, HAVERHILL, MA USA 01835-0788 TOLL FREE: (877) 246-7890 FAX: (781) 245-4531 E-mail: [email protected]
MB SERIES - MICRO-LIMIT SWITCHES
Actuator Hinge lever Roller lever Simulated roller lever.Actuator length, inches ±.031" .189 .276 .276 .370 .098 .185 .185 .280 .098 .185 .185 .280 ±0.8mm 4.8 7.0 7.0 9.4 2.5 4.7 4.7 7.1 2.5 2.7 4.7 7.1
Fixed position, EH=rear EV=front EH EV EH EV EH EV EH EV EH EV EH EVOperating force, ≤ grams ≤ ??? 100 45 85 40 110 50 95 40 115 60 95 50
Pre-travel, ≤ inches .177 .354 .197 .394 .177 .354 .197 .394 .177 .354 .197 .394 ≤ mm 4.5 9 5 10 4.5 9 5 10 4.5 9 5 10
Overtravel, min. inches .030 .049 .030 .059 .030 .049 .030 .059 .030 .049 .030 .059 min. mm 0.75 1.25 0.75 1.5 0.75 1.25 0.75 1.5 0.75 1.25 0.75 1.5
Overtravel, max. inches .059 .098 .059 .118 .059 .098 .059 .118 .059 .098 .059 .118 max.mm 1.5 2.5 1.5 3 1.5 2.5 1.5 3 1.5 2.5 1.5 3
Movement diff.≤ inches .035 .059 .047 .071 .028 .059 .039 .071 .028 .059 .039 .071 ≤ mm 0.9 1.5 1.2 1.8 0.7 1.5 1 1.8 0.7 1.5 1 1.8
Free position, ≤ inches .551 .709 .591 .787 .748 .866 .787 .945 .748 .866 .787 .945 ≤ mm 14 18 15 20 19 22 20 24 19 22 20 24Operating position, inches .421 .472 .437 .492 .622 .669 .638 .689 .630 .677 .646 .697 Tolerance inches ± .063 .118 .071 .138 .063 .118 .071 .138 .063 .118 .071 .138Operating position, mm 10.7 12 11.1 12.5 15.8 17 16.2 17.5 16 17.2 16.4 17.7 Tolerance mm ± 1.6 3 1.8 3.5 1.6 3 1.8 3.5 1.6 3 1.8 3.5
Order code B B2 B1 B3 C C2 C1 C3 E E2 E1 E3
ACTUATORS AND SPECIFICATIONS
MECHANICAL OUTLINES
Hinge lever Roller lever Simulated roller lever
Normally open Change-over
Side view (w/solder terminal) Normally closed P.C. terminal
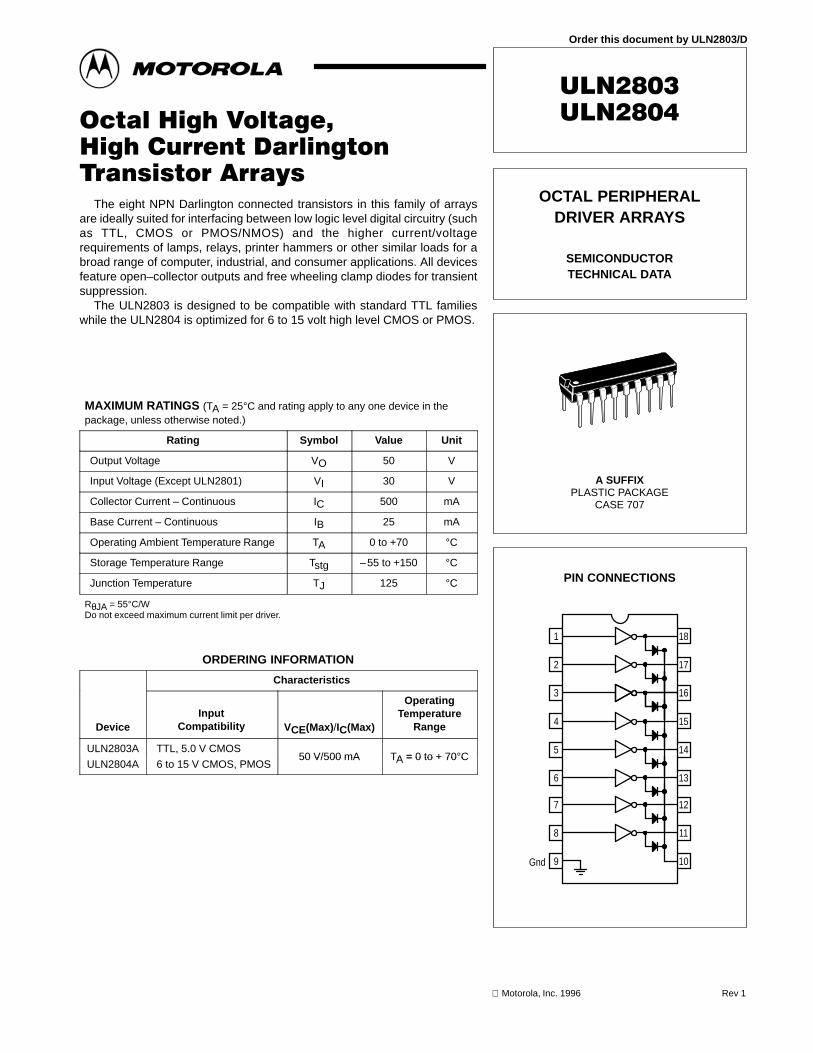
SEMICONDUCTORTECHNICAL DATA
OCTAL PERIPHERALDRIVER ARRAYS
PIN CONNECTIONS
Order this document by ULN2803/D
A SUFFIXPLASTIC PACKAGE
CASE 707
6
9
8
7
5
4
3
2
1
10
11
12
13
14
15
16
17
18
Gnd
1MOTOROLA ANALOG IC DEVICE DATA
The eight NPN Darlington connected transistors in this family of arraysare ideally suited for interfacing between low logic level digital circuitry (suchas TTL, CMOS or PMOS/NMOS) and the higher current/voltagerequirements of lamps, relays, printer hammers or other similar loads for abroad range of computer, industrial, and consumer applications. All devicesfeature open–collector outputs and free wheeling clamp diodes for transientsuppression.
The ULN2803 is designed to be compatible with standard TTL familieswhile the ULN2804 is optimized for 6 to 15 volt high level CMOS or PMOS.
MAXIMUM RATINGS (TA = 25°C and rating apply to any one device in thepackage, unless otherwise noted.)
Rating Symbol Value Unit
Output Voltage VO 50 V
Input Voltage (Except ULN2801) VI 30 V
Collector Current – Continuous IC 500 mA
Base Current – Continuous IB 25 mA
Operating Ambient Temperature Range TA 0 to +70 °C
Storage Temperature Range Tstg –55 to +150 °C
Junction Temperature TJ 125 °C
RθJA = 55°C/WDo not exceed maximum current limit per driver.
ORDERING INFORMATION
D i
Characteristics
DeviceInput
Compatibility VCE(Max)/IC(Max)
OperatingTemperature
Range
ULN2803A TTL, 5.0 V CMOS50 V/500 mA TA = 0 to + 70°C
ULN2804A 6 to 15 V CMOS, PMOS50 V/500 mA TA = 0 to + 70°C
Motorola, Inc. 1996 Rev 1
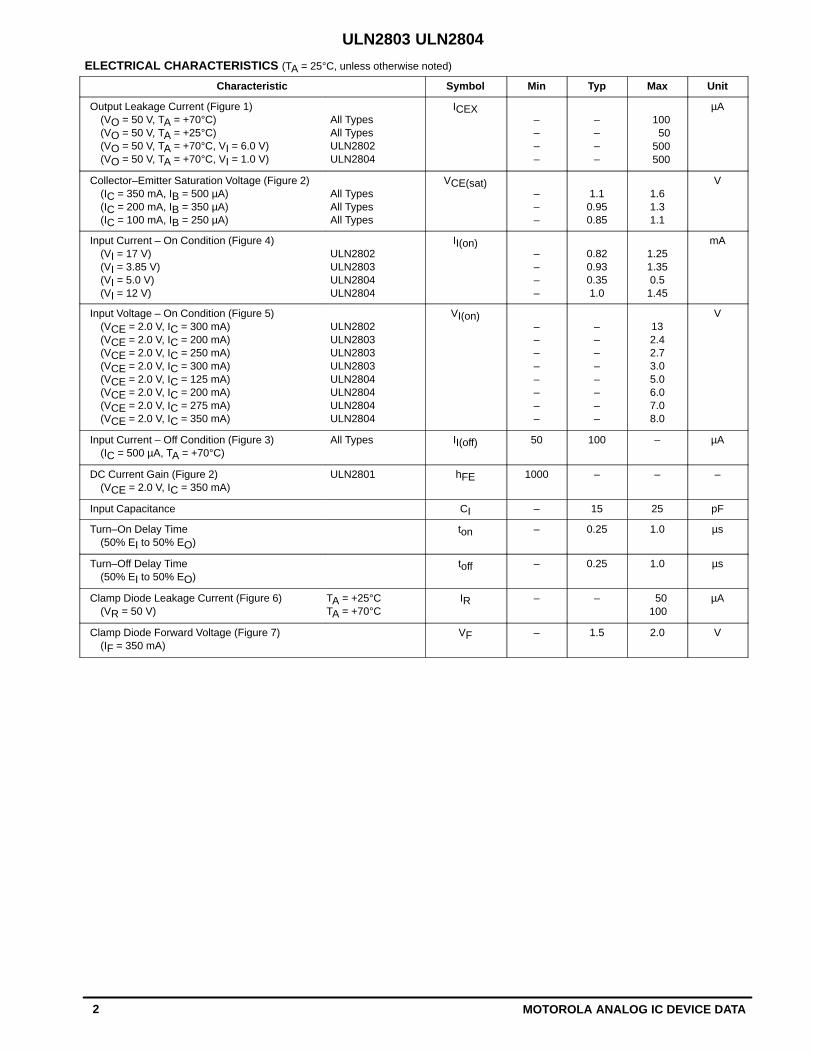
ULN2803 ULN2804
2 MOTOROLA ANALOG IC DEVICE DATA
ELECTRICAL CHARACTERISTICS (TA = 25°C, unless otherwise noted)
Characteristic Symbol Min Typ Max Unit
Output Leakage Current (Figure 1)(VO = 50 V, TA = +70°C)(VO = 50 V, TA = +25°C)(VO = 50 V, TA = +70°C, VI = 6.0 V)(VO = 50 V, TA = +70°C, VI = 1.0 V)
All TypesAll TypesULN2802ULN2804
ICEX––––
––––
10050
500500
µA
Collector–Emitter Saturation Voltage (Figure 2)(IC = 350 mA, IB = 500 µA)(IC = 200 mA, IB = 350 µA)(IC = 100 mA, IB = 250 µA)
All TypesAll TypesAll Types
VCE(sat)–––
1.10.950.85
1.61.31.1
V
Input Current – On Condition (Figure 4)(VI = 17 V)(VI = 3.85 V)(VI = 5.0 V)(VI = 12 V)
ULN2802ULN2803ULN2804ULN2804
II(on)––––
0.820.930.351.0
1.251.350.51.45
mA
Input Voltage – On Condition (Figure 5)(VCE = 2.0 V, IC = 300 mA)(VCE = 2.0 V, IC = 200 mA)(VCE = 2.0 V, IC = 250 mA)(VCE = 2.0 V, IC = 300 mA)(VCE = 2.0 V, IC = 125 mA)(VCE = 2.0 V, IC = 200 mA)(VCE = 2.0 V, IC = 275 mA)(VCE = 2.0 V, IC = 350 mA)
ULN2802ULN2803ULN2803ULN2803ULN2804ULN2804ULN2804ULN2804
VI(on)––––––––
––––––––
132.42.73.05.06.07.08.0
V
Input Current – Off Condition (Figure 3)(IC = 500 µA, TA = +70°C)
All Types II(off) 50 100 – µA
DC Current Gain (Figure 2)(VCE = 2.0 V, IC = 350 mA)
ULN2801 hFE 1000 – – –
Input Capacitance CI – 15 25 pF
Turn–On Delay Time(50% EI to 50% EO)
ton – 0.25 1.0 µs
Turn–Off Delay Time(50% EI to 50% EO)
toff – 0.25 1.0 µs
Clamp Diode Leakage Current (Figure 6)(VR = 50 V)
TA = +25°CTA = +70°C
IR – – 50100
µA
Clamp Diode Forward Voltage (Figure 7)(IF = 350 mA)
VF – 1.5 2.0 V
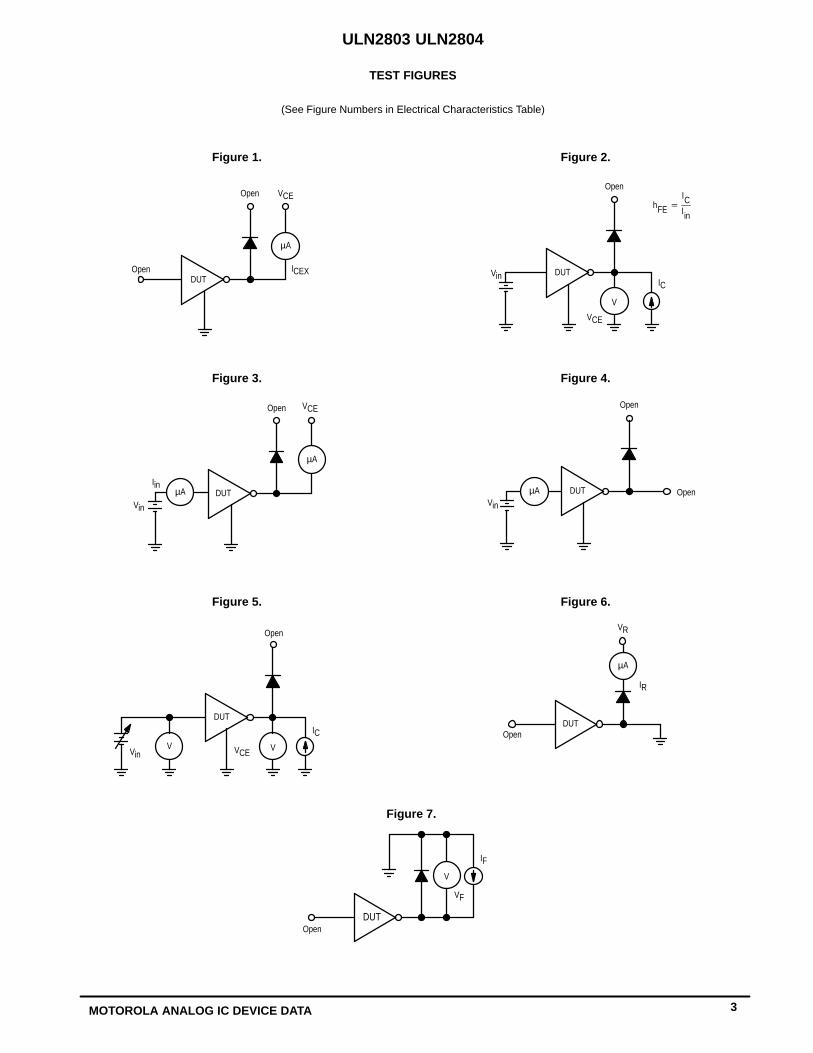
ULN2803 ULN2804
3MOTOROLA ANALOG IC DEVICE DATA
IC
VCEOpen
µA
Open ICEXDUT
V
DUT
Open
Vin
VCE
Open
IF
VF
V
DUT
V
IC
µA
DUT
IR
VR
DUT
Open
VCE
Open
VinV
TEST FIGURES
VCEOpen
µA
DUTµAVin
Iin
hFEICIin
(See Figure Numbers in Electrical Characteristics Table)
OpenDUT
Open
Vin
µA
Figure 1. Figure 2.
Figure 3. Figure 4.
Figure 5. Figure 6.
Figure 7.
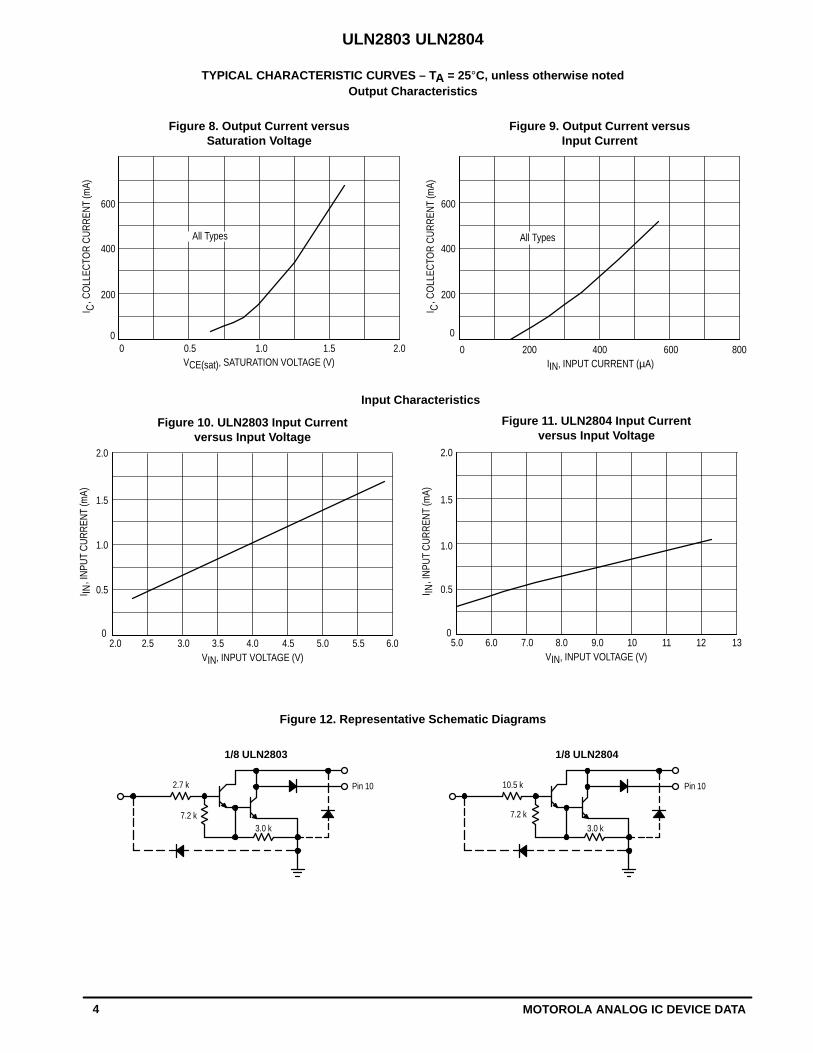
ULN2803 ULN2804
4 MOTOROLA ANALOG IC DEVICE DATA
200
2.0 5.0VIN, INPUT VOLTAGE (V)
1211109.08.07.06.00
0.5
1.0
1.5
2.0
6.05.55.04.53.5 4.03.02.50
2.0
0.5
1.0
All Types
IIN, INPUT CURRENT (µA)8006004002000
0
200
400
0.5
600
2.01.50 1.0
All Types
0
600
400
VCE(sat), SATURATION VOLTAGE (V)
1.5
VIN, INPUT VOLTAGE (V)
Input Characteristics
Figure 8. Output Current versusSaturation Voltage
I ,
INPU
T C
UR
REN
T (m
A)IN I
, IN
PUT
CU
RR
ENT
(mA)
IN
I ,
CO
LLEC
TOR
CU
RR
ENT
(mA)
C I ,
CO
LLEC
TOR
CU
RR
ENT
(mA)
C
TYPICAL CHARACTERISTIC CURVES – T A = 25°C, unless otherwise notedOutput Characteristics
Figure 9. Output Current versusInput Current
Figure 10. ULN2803 Input Currentversus Input Voltage
Figure 11. ULN2804 Input Currentversus Input Voltage
13
2.7 k
7.2 k3.0 k
Pin 10
1/8 ULN2803
3.0 k
7.2 k
10.5 k
1/8 ULN2804
Figure 12. Representative Schematic Diagrams
Pin 10
ULN2803 ULN2804
5MOTOROLA ANALOG IC DEVICE DATA
OUTLINE DIMENSIONS
NOTES:1. POSITIONAL TOLERANCE OF LEADS (D),
SHALL BE WITHIN 0.25 (0.010) AT MAXIMUMMATERIAL CONDITION, IN RELATION TOSEATING PLANE AND EACH OTHER.
2. DIMENSION L TO CENTER OF LEADS WHENFORMED PARALLEL.
3. DIMENSION B DOES NOT INCLUDE MOLDFLASH.
1
SEATINGPLANE
10
9
18
M
A
B
K
C
N
F
G
DH
J
LDIM MIN MAX MIN MAX
INCHESMILLIMETERS
A 22.22 23.24 0.875 0.915B 6.10 6.60 0.240 0.260C 3.56 4.57 0.140 0.180D 0.36 0.56 0.014 0.022F 1.27 1.78 0.050 0.070G 2.54 BSC 0.100 BSCH 1.02 1.52 0.040 0.060J 0.20 0.30 0.008 0.012K 2.92 3.43 0.115 0.135L 7.62 BSC 0.300 BSCM 0 15 0 15 N 0.51 1.02 0.020 0.040
A SUFFIXPLASTIC PACKAGE
CASE 707–02ISSUE C

ULN2803 ULN2804
6 MOTOROLA ANALOG IC DEVICE DATA
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regardingthe suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, andspecifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters which may be provided in Motoroladata sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights ofothers. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or otherapplications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injuryor death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorolaand its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney feesarising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges thatMotorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an EqualOpportunity/Affirmative Action Employer.
How to reach us:USA/EUROPE/Locations Not Listed : Motorola Literature Distribution; JAPAN : Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, 6F Seibu–Butsuryu–Center,P.O. Box 20912; Phoenix, Arizona 85036. 1–800–441–2447 or 602–303–5454 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 03–81–3521–8315
MFAX: [email protected] – TOUCHTONE 602–244–6609 ASIA/PACIFIC : Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park, INTERNET: http://Design–NET.com 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
ULN2803/D
◊
Related Documents











